
基于Matlab与Labview的柔索并联机器人监控系统联合仿真
2012-07-04 09:42吴瑕,訾斌,林俊
制造业自动化 2012年13期
吴 瑕,訾 斌,林 俊
(中国矿业大学 机电工程学院,徐州 221116)
0 引言
近年来,柔索并联机器人应用日渐增多,如各国研究人员纷纷开展这方面的研究工作,研制了用于起重、检测、加工、港口货物吊装、海底打捞、超大口径射电望远镜跟踪射电源运动等多种用途柔索并联机器人样机,因而,柔索并联机器人的研究在加工制造业、装配业、医疗卫生、海洋探测和航天领域等方面具有一定理论意义和实际工程应用价值[1,2]。柔索并联机器人是一个具有非线性、时变特性以及扰动特点的机器人系统。而对机器人系统应用神经网络控制、模糊控制和鲁棒控制等算法进行过研究[3~6]。
当今时代,随着计算机网络的迅速发展及信息技术的日益完善,工业机器人基于Internet的远程监控应用的实现成为可能[7],这不仅突破了传统监控方式的时空限制和地域障碍,而且有利于数据的积累和更广范围的资源共享,可以实施多样化协同服务。
基于以上分析,本文以柔索并联机器人为对象,以运动轨迹跟踪监控为目标,根据模糊控制理论的特点,提出一种针对外界干扰的自适应模糊补偿控制方案,通过Matlab/Simulink与LabVIEW联合仿真构建了一个监控网络平台。该网络平台的搭建不仅扩展了对柔索并联机器人的运动轨迹跟踪监控的异地远程范围,提高了监控效率,而且有利于更广层面的多样化协同服务,为实现网络化的高精度测控体系奠定了基础。
1 柔索并联机器人监控系统设计
柔索并联机器人结构示意图如图1所示。在图1所建立的直角坐标系中,三个柔索塔以等边三角形排布。在三个伺服电机的协同驱动下,三根柔索的收、放长度不断改变调整,从而共同驱动末端执行器所载工件来实现其空间位置的运动。对于给定轨迹的工件,任意时刻其位置坐标以及各柔索长度均可通过正、逆运动学分析得知[2],故为下一步的轨迹规划奠定了基础。
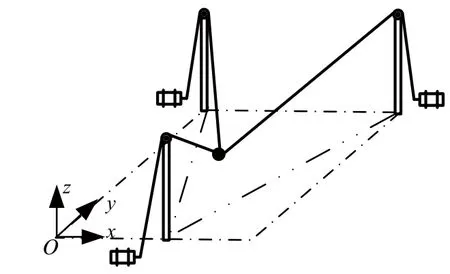
图1 柔索并联机器人结构示意图
所搭建的柔索并联机器人监控系统的网络平台总体框架如图2所示。
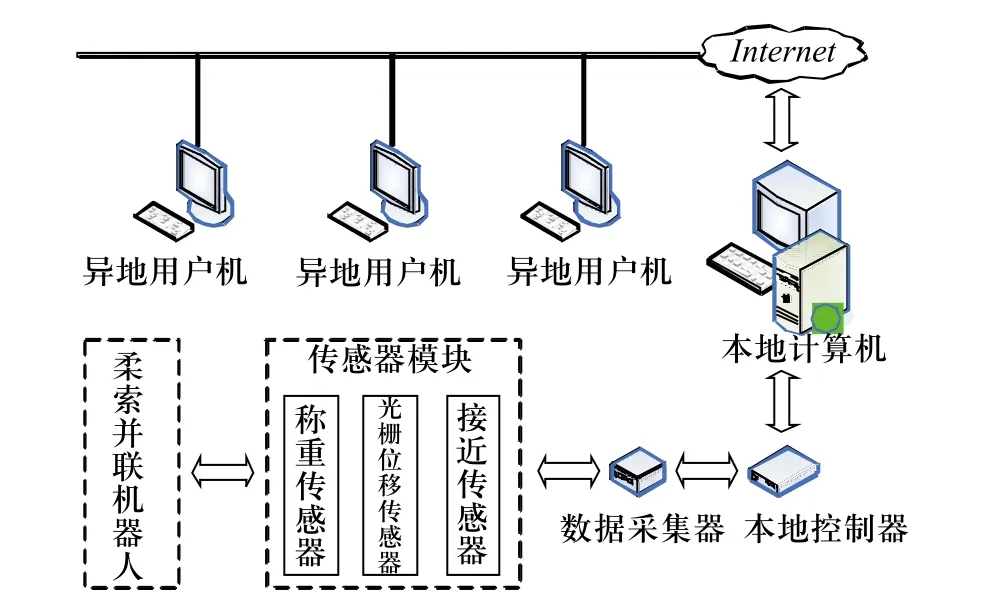
图2 柔索并联机器人监控系统总体框架
传感器模块中的接近传感器是为了避免末端执行器与其它部位相碰撞,称重传感器用来测量并限制工件的重量,光栅位移传感器用于检测工件当前在X、Y、Z三个方向上的实际运行位置;数据采集器对传感器信号进行一系列调理后传送至本地控制器;本地控制器负责发布监控指令,处理接收到的传感器数据后传输至本地计算机,并通过控制伺服电机的运转来调整索长,进而控制工件的运行轨迹;本地计算机利用系统开发软件,对柔索并联机器人的现场运行状况进行监控,并作为Web服务器与数据库服务器建立相应的IP站点和网页,通过HTTP协议接入到Internet,最终发布到异地用户机上为用户提供监控。
2 柔索并联机器人自适应模糊控制
在忽略柔索自重并刚性化假设的情况下,文献[8]描述了柔索机器人动能与势能的表达式,建立了Lagrange函数。结合文献[9]对Lagrange方程的推导,下面给出在考虑外加干扰下的柔索并联机器人控制系统的数学模型为:

式中:q=[ q1q2q3]T为索长的实际值,为正定惯量矩阵,
在实际系统中,外界干扰并不能完全由可测状态反映,因此利用模糊逻辑系统(FLS)来逼近外界干扰项,并对其进行实时补偿,从而克服干扰的不确定性,提高控制器的轨迹跟踪性能。柔索并联机器人模糊控制系统结构如图3所示。
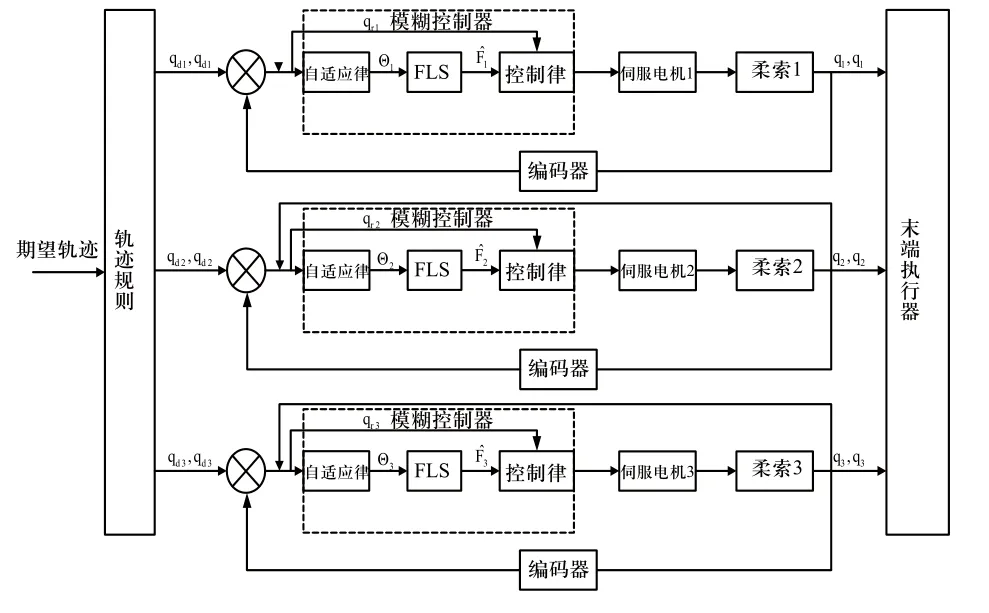
图3 柔索并联机器人模糊控制系统结构图

为了使索长跟踪误差e逼近于零,选取滑模面为

选取如下Lyapunov候选函数

假设柔索并联机器人的状态变量都是可测的,参数矩阵都是有界的,系统的期望轨迹二阶连续可导,令输入控制规律为

式中:K为正定常值增益矩阵。
式(4)两边对时间求导,得到

式中:w为FLS的最小逼近误差。
因此,选择如下形式的自适应控制律

由于K为正定矩阵,通过设计足够多规则的模糊系统可使w充分小,从而根据Lyapunov稳定性理论以及Barbalat引理,表明可以使柔索并联机器人系统的跟踪误差渐近收敛到零。因此,所设计的模糊控制闭环系统是渐进稳定的,可以实现预定的控制目标。
3 联合仿真
为检验提出的自适应模糊控制方案的性能,并实现柔索并联机器人的监控功能,本节在Matlab/Simulink环境下对系统进行数值仿真模拟,然后构建LabVIEW图形化的用户界面与控制算法模型联合仿真,最后通过Web远程面板技术发布,为异地用户提供网络监控。

图4 监控系统联合仿真流程图
柔索并联机器人监控系统的联合仿真流程图如图4所示。在Simulink中编写的控制算法模型文件,通过SIT仿真接口工具箱的TCP/IP协议,与LabVIEW的程序面板相连接,交互式地显示仿真所产生的数据。同时,LabVIEW利用串口通讯获取末端执行器上称重传感器、位移传感器和接近传感器的串口数据。针对工件超载和碰撞两种情况,监控系统设有伺服电机的自动/手动开关实现电机的停启功能。在监控系统中,本地计算机作为上位机建立本地监控端外,还通过LabVIEW内置的Web Server,采用HTTP协议进行数据传输通信,对异地监控端提出的连接请求进行远程连接,实现异地用户的监控功能。
柔索并联机器人系统相关参数选取为:空间末端执行器所载工件质量m=5kg,柔索塔高为h=2m,所排布的等边三角形边长为a=2m。控 制 系 统 相 关 参 数 选 取 为:λ1=λ2=λ3=10,Г1=Г2=Г3=0.001,正定增益常值 K1=K2=K3=250,外界干扰项 τd1=τd2=τd3=15sin(20t);模糊逻辑系统中,每个变量的模糊规则数目为5条,高斯型隶属函数的中心特征参数分别选取0、1、2、3、4,偏离特征参数选取0.6。
令柔索并联机器人系统的空间运动期望轨迹方程为
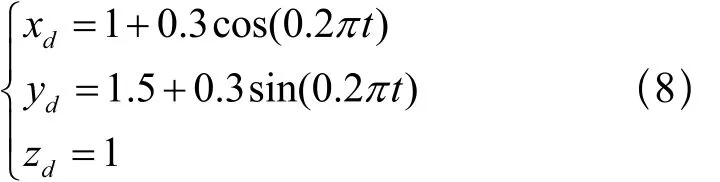
通过逆运动学分析进行轨迹规划,可以得到柔索长度期望轨迹
系统运行的初始条件取x (0)=1.3,y (0)=1.5,z (0)=1,系统运动跟踪过程所用时间为t =10s。
基于Simulink与LabVIEW联合仿真的监控界面如图5所示。图6~图8为工件分别在X、Y、Z坐标方向上的轨迹跟踪误差;图9~图11分别表示三根索长的期望轨迹与实际轨迹。

图5 联合仿真监控界面
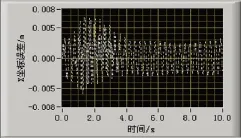
图6 工件沿X坐标位置跟踪

图7 工件沿Y坐标位置跟踪
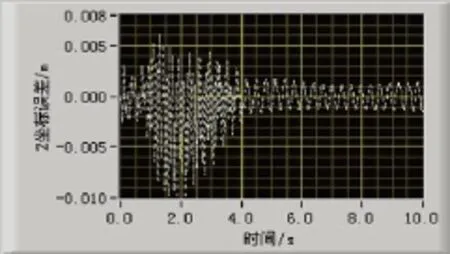
图8 工件沿Z坐标位置跟踪

图9 家长1跟踪期望轨迹
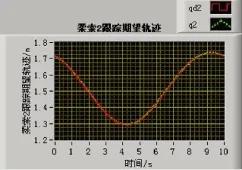
图10 家长2跟踪期望轨迹
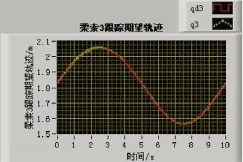
图11 家长3跟踪期望轨迹
在图5所示的监控界面中,异地用户无需安装特别的软件,只需利用标准浏览器按照规定的格式输 入 URL(http://219.219.33.101/remote.html), 请求连接成功获取监控权限后,即可在线监测光栅位移传感器、称重传感器、接近传感器读取的实时数据,并根据工件超载报警灯和碰撞报警灯的亮暗情况,对伺服电机采取自动/手动的停启功能。同时,界面上实时显示着工件在 方向的轨迹跟踪、索长的轨迹跟踪,以及通过自适应模糊算法的三维空间轨迹跟踪图,这为异地用户监控柔索并联机器人提供了更为直观有效的监控信息。
从以上联合仿真图,可以看出控制系统输出的索长变化轨迹以及末端执行器所载工件运行的实际轨迹分别与相对应的期望轨迹有较好的重合度,且工件沿 方向的跟踪误差分别在±0.008m、±0.01m、、±0.01m范围之内。这表明所提出的控制方案能够较好地抑制并补偿外界扰动因素的影响,充分发挥了自适应模糊控制鲁棒性强、动态响应快的特点。
通过联合仿真,Simulink编写的控制算法模型能够直接与LabVIEW进行数据传输,从而可以更加快速地验证算法的正确性;另一方面,采用Web技术只需开发和维护服务端应用程序,大大减少了系统的管理和维护工作。联合仿真的监控人机界面友好,显示结果具有较高的可靠性及直观性,充分发挥了网络通信技术的运行速度快、信息及时性好等优点。综上所述,所设计的监控界面能有效、准确地为用户提供柔索并联机器人系统的运行状况,满足异地用户的监控目的。
4 结论
1)针对柔索并联机器人的结构特点,搭建了柔索并联机器人监控系统的总体框架。通过对柔索并联机器人系统的非线性强、易受外界干扰等特性的分析,提出了一种带有模糊补偿的自适应控制算法,并以此为基础,通过Matlab与LabVIEW混合编程进行了柔索并联机器人的运动轨迹跟踪联合仿真、监控界面的设计及网络发布。
2)联合仿真结果表明控制系统输出的实际轨迹与期望轨迹有较好的重合度,即实际运行轨迹能较好地跟踪期望轨迹,并且监控人机界面友好,
显示结果具有较高的可靠性及直观性。因此,所提出的自适应模糊控制监控方案能有效抑制并补偿外界扰动因素的影响,具有良好的轨迹跟踪性能,为下一步实现网络化的高精度柔索并联机器人测控体系奠定了基础。
[1] Zi Bin, Zhu Zhencai, Du Jingli.Analysis and control of the cable-supporting system including actuator dynamics[J].Control Engineering Practice, 2011, 19(5): 491-501.
[2] 訾斌, 朱真才, 曹建斌.混合驱动柔索并联机器人的设计与分析[J].机械工程学报, 2011, 17(47): 1-8.
[3] WAI R J, HUANG Y C, YANG Z W.Adaptive fuzzyneural-network velocity sensorless control for robot manipulator position tracking[J].IET Control Theory and Applications, 2010, 4(6): 1079–1093.
[4] HA Q P, NGUYEN Q H, RYE D C.Fuzzy sliding-mode controllers with applications[J].IEEE Transaction on Industrial Electronics, 2001, 48(1): 38-46.
[5] 赵东亚, 李少远, 高峰.六自由度并联机器人分散鲁棒非线性控制[J].控制理论与应用, 2008, 5(25): 867-872.
[6] 刘金琨.机器人控制系统的设计与MATLAB仿真[M].北京:清华大学出版社, 2008.
[7] 耿海霞, 陈启军, 王月娟.基于Web的远程控制机器人研究[J].机器人, 2002, 24(4): 375-379.
[8] GORMAN J, JABLOKOW K W, CANNON D J.The Cable array robot: theory and experiment[C].IEEE International Conference on Robotics and Automation,Seoul, Korea, 2001, 2804–2810.
[9] SHIANG W J, CANNON D, GORMAN J.Dynamic analysis of the cable array robotic crane[C].IEEE International Conference on Robotics and Automation,Detroit, Michigan, 1999, 2495-2500.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
晚晴(2019年5期)2019-07-08
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
中国卫生(2016年5期)2016-11-12
电子制作(2016年21期)2016-05-17
燕山大学学报(2015年4期)2015-12-25
汽车零部件(2015年5期)2015-01-03
