
极端环境下月球车起动能力研究
2012-06-28 03:56刘景林吴喜桥
东南大学学报(自然科学版) 2012年1期
王 立 刘景林 吴喜桥
(西北工业大学自动化学院,西安710129)
月面恶劣路况下,车辆通过性很差[1-2].作为 搭载众多科学仪器的移动工具平台,月球车必须具备很强的月面通过能力.在月球车起动初始时刻,车轮受到月壤层的阻力极大[3-4],可达稳态运行时的数倍,车轮驱动电机通过减速机构输出至轮轴的驱动力矩能否克服该阻力是月球车顺利起动的关键.以试验评估月球车的起动能力,需要大量真实月壤和模拟月面环境.迄今为止,Apollo和Luna登月采集的月壤只有约380 kg,数量不能满足碾压试验需求,而在地面实验室中模拟高真空、微重力或极限温度等月面环境条件的技术难度大、成本高.
建模仿真提供了研究问题的另一条路径.研究人员借助轮-地作用模型对月球车进行了大量研究工作.为使月球车沿规划路径行驶,文献[5]提出了补偿车轮滑移的控制方法.文献[6]对比2种车辆结构,研究了影响月球车移动性能的敏感因素.文献[7]建立了阿基米德螺线驱动方式月球车的数学模型.文献[8]研究了轮刺效应.以上成果得到了试验验证,试验数据同时也证明了轮-地作用模型在月球车研究中的有效性.
以上文献对月球车稳态性能进行研究,没有讨论起动问题.起动是月球车最为严峻的工况之一,若不能顺利起动,则无法进入稳态运行.基于修正后的应力分布公式,建立了刚性车轮与松软月壤间滚动作用的力学模型,分析了载荷、车轮尺寸以及部分月壤参数对起动难度的影响.综合车轮驱动系统的效率、可靠性和控制性能等多方面考虑,鉴于稀土永磁直流无刷电机诸多优点[9],将其选为车轮驱动电机.建立了电机的有限元仿真模型,考虑电机主要材料的温度敏感性[10],研究了月面极限温度对电机起动性能的影响.
1 轮-地作用模型
为经受高真空和巨大温差的考验,月球车车轮采用特殊合金制成,车轮与月壤间作用则归于地面力学中刚性车轮与变形路面间作用的范畴.月球车在松软月面上行驶时,车轮发生沉陷和滑转,月壤受到挤压而流动.仅分析与轮缘接触部分月壤的应力-应变关系是研究月球车轮-地作用的方法之一[11],单个车轮的轮-地作用模型如图1所示.为提高牵引性能,在车轮外圆周安装有轮刺.图1(a)为应力分布形式的模型,v为整车平动速度,ω为车轮转速,T为车轮驱动力矩,W为轮轴法向载荷,σ(θ)为正应力,τ(θ)为剪应力,z为车轮沉陷量,θ为轮-地接触面上任一位置角度,θ1为车轮开始进入轮-地接触面的位置角度,θ2为车轮开始离开轮-地接触面的位置角度.沿轮-地接触面对σ(θ)和τ(θ)积分得到的集中力和力矩形式的模型如图1(b)所示,Fy为月壤对车轮的支撑力,Fx为车轮的挂钩牵引力,TR表示车轮受到的阻碍力矩.

图1 轮-地作用模型
车轮滑转程度用滑转率s描述:

式中,r为车轮半径.
当s=0时,v=ωr,车轮处于纯滚动状态.当0<s<1时,v<ωr,车轮处于滚动和滑动的并存状态.当s=1时,v=0而ωr≠0,车轮处于纯滑动状态.月球车正常运行时,车轮保持第2种状态.在起动初始时刻,车轮处于最后一种状态.
文献[12-14]利用轮-地作用测试平台测试月球车车轮的牵引性能,并对应力分布公式进行修正,修正后的公式具有极高的精度.
修正后的 σ(θ)为

式中,b为车轮宽度;n为月壤沉陷因数;kc为月壤粘聚模量;kφ为月壤摩擦模量;θm为最大应力角.
修正后的 τ(θ)为

式中,R为车轮最大外圆半径;θ'1为修正的θ1;c为月壤内聚力;φ为月壤内摩擦角;j0为月壤剪切位移.
假设车轮与月壤在轮-地接触面上完全接触,则

起动初始时刻,月球车静止于月面,τ(θ)为零,而 σ(θ)不为零.整车载荷由 σ(θ)在竖直方向上的分量平衡,由静沉陷zs确定车轮初始位置:

2 电机有限元建模
月面环境条件下,电机的磁钢性能和绕组电阻对温度变化比较敏感.
磁钢剩磁密度Br(t)与温度的关系为

式中,t为工作温度;αBr为剩磁密度的可逆温度系数;ΔBr为剩磁密度的不可逆损失率;Br20为室温时磁钢的剩磁密度.
绕组电阻ra(t)与温度的关系为

式中,pt为绕组导体的电阻温度系数;ra20为室温时绕组电阻.
根据设计指标,设计了样机.样机主要尺寸为:定子外径30.3 mm,定子轭厚度2.8 mm,定子内径17.5 mm,气隙厚度 1 mm,磁钢厚度 2.75 mm,转子外径11 mm,转子轭厚度3.5 mm.样机主要材料为:定转子铁心 DW230-35,磁钢 NSC27G,转轴不锈钢,铜线绕组.在Flux中建立了样机的有限元模型,模型由几何模型和电路模型构成,如图2所示.
在不降低求解精度的前提下,缩小研究域能够减小运算量,进而提高仿真速度.样机截面图的几何结构和物理属性同时具备周期性和对称性,通过设置边界条件缩小研究域,仅取样机截面图的1/8作为几何模型.为研究给定电流下电机的输出转矩,电路模型采用理想电流源供电.开关管导通时,电流的变化不受绕组电感影响,波形为理想方波.
3 月球车起动能力评估
3.1 起动难度的影响因素

图2 有限元模型
目前,据公开的文献资料,尚无法获取完整的月壤参数.月壤的力学特性与松软干沙具有一定的相似性,利用干沙参数近似月壤参数,考察W和车轮尺寸变化时TR的变化,结果如图3所示.由图3可知:W和车轮尺寸增大,TR随之增大;TR对h变化极其敏感,对b的变化较不敏感.根据c和φ的最佳估计值[15],考察TR的变化范围,结果如图4所示.由图可知:月面不同位置下的TR差异较大.当W=30 N时,撞击坑外坡部TR的最大值达5.641 N·m,而撞击坑内岩墙TR的最小值仅为0.951 N·m.
3.2 电机起动性能仿真
对整个月面的温度分布和变化规律尚未有完整认识[16].月面温度由纬度和月球昼夜周期时间决定,普遍认为月面大部分区域的温度变化范围为[-180℃,150℃].假设起动初始时刻,月球车车轮驱动电机各部分温度与月面环境相同.电机空载时的磁密云图如图5所示.由图可知:温度上升导致磁钢磁性能下降,进而导致电机磁路饱和程度降低.
设置电流源电流为1.2 A,电机的电磁转矩波形如图6所示.由图6可知:转矩波形接近正弦波,变化周期为一个状态角;不同温度下,转矩的最小值接近,而最大值随着温度降低而明显增大;同一转子位置下,低温时的转矩大于或接近高温时.
绕组电流由极小值逐渐增大至堵转电流,电机的电磁转矩波形如图7所示.由图7可见:低温环境下,电机能够获得较大的驱动电流,而相同温度下,较大的电流有助于电机输出较大的转矩.
电磁转矩的统计数据见表1,由数据可知:转矩波动较大,若按平均值预测起动转矩,则可能大幅度高估电机的起动能力;无论是否限流,低温环境下电机输出转矩能力更强.

图3 TR与W及车轮尺寸的关系

图4 月面不同位置的TR

图5 空载磁密云图
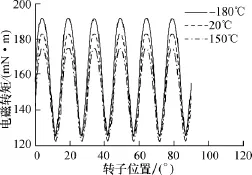
图6 1.2A电流时的电磁转矩
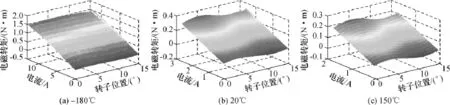
图7 不同电流下的电磁转矩
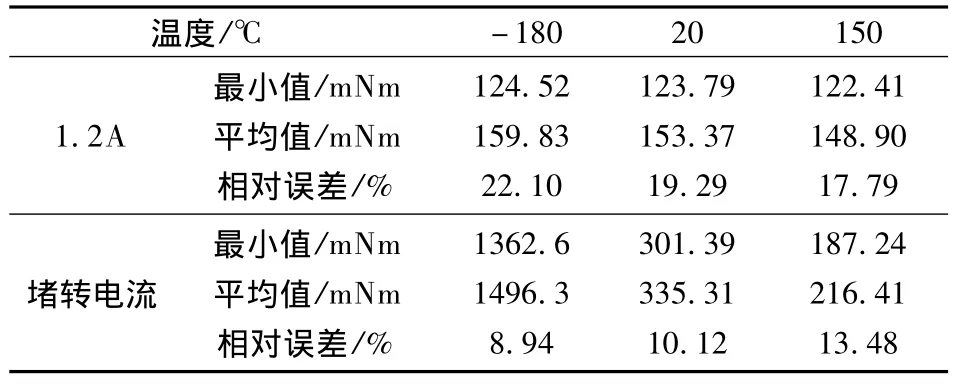
表1 电磁转矩的统计数据
3.3 转矩波动原因分析
电磁转矩波动与气隙磁场分布密切相关,气隙磁场畸变会导致转矩波动加剧[17-19].电机负载工作时,气隙磁场是磁钢磁场和电枢反应磁场的合成磁场,随转子位置和绕组电流瞬时值变化.电机空载、绕组通过1.2A和堵转电流时,气隙磁密波形如图8所示.由图8可知:1)空载时,波形接近梯形,磁密过零点位置位于磁钢交界位置;2)绕组通过1.2A电流后,波形平顶部分的一侧略高于另一侧,但波形畸变不明显,磁密过零点位置与空载时基本相同;3)绕组通过堵转电流后,-180℃时的波形畸变明显,磁密过零点位置偏移量大,但随着温度升高,波形畸变程度降低,磁密过零点位置偏移量减小.
不同转子位置下的气隙磁密平均值对比如图9所示,统计数据见表2.由图9和表2可知:1)电机空载时,不同转子位置下的磁密平均值波动极小.同一转子位置下,磁密平均值随温度降低而小幅增大;2)绕组通过1.2A电流后,磁密平均值波动仍不明显.与空载时对比,大部分转子位置下电枢反应起去磁作用,但就平均效应看,电枢反应仅起微弱的去磁作用;3)绕组通过堵转电流后,磁密平均值波动幅度加大,但同一转子位置下电枢反应的增、去磁关系与绕组通过1.2A电流时相同.波动随温度降低而加剧,但就平均效应看,电枢反应的去磁作用仍不明显.

图8 气隙磁密波形
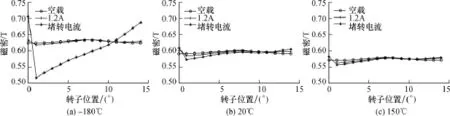
图9 气隙磁密平均值对比
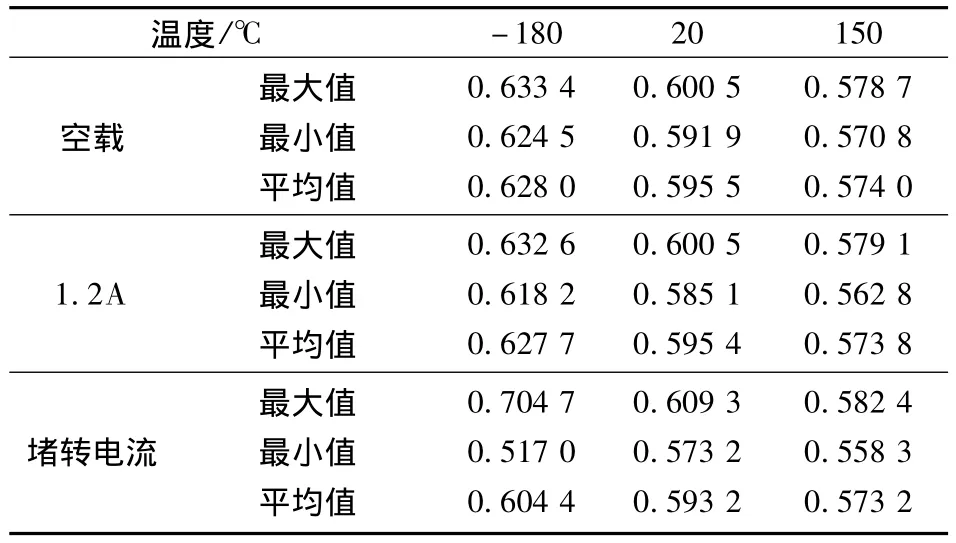
表2 气隙磁密平均值的统计数据 T
3.4 实验验证
轮-地作用模型的精度已经得到众多文献证明,仅对电机模型进行验证.样机的仿真结果与实验数据对比如图10所示.实验结果表明,模型具有较好的精度.

图10 仿真与实验数据对比
可能导致误差的原因:1)研究对象与仿真模型之间存在误差.仿真模型忽略了端部效应、磁滞效应、涡流效应,并假设电机外部磁场为零、电流均匀分布在绕组横截面上、开关管管压降为常数.2)难以建立准确的数学表达式描述电机运行时的轴承摩擦和空气阻力,建模时仅能凭经验进行估计.
4 结论
1)减轻载荷或减小车轮尺寸,能够降低月球车起动难度;
2)月面不同位置下,月壤参数的差异可能导致月球车起动难度悬殊;
3)车轮驱动电机的输出转矩随转子位置大幅波动,不能按平均值预测电机的起动转矩;
4)低温环境有利于月球车的起动.
References)
[1]Li Meng,Gao Feng,Sun Peng.Prediction method of lunar rover's tractive performance based on similitude methodology[C]//The Fifth International Conference on Intelligent Computation Technology and Automation.Zhangjiajie,China,2012:686-689.
[2]Wang Xiaolan,Wang Rongben.A novel modeling method of virtual lunar surface based on lunar surface roughness[C]//2011 International Conference on Remote Sensing,Environment and Transportation Engineering.Nanjing,China,2011:17-20.
[3]Gu Kanfeng,Wei Yingzi,Wang Hongguang,et al.Dynamic modeling and sliding mode driving control for lunar rover slip[C]//2007 IEEE International Conference on Integration Technology.Shenzhen,China,2007:36-41.
[4]Ray L E.Estimation of terrain forces and parameters for rigid-wheeled vehicles[J].IEEE Transactions on Robotics,2009,25(3):717-726.
[5]Ishigami G,Nagatani K,Yoshida K.Slope traversal experiments with slip compensation control for lunar/planetary exploration rover[C]//2008 IEEE International Conference on Robotics and Automation.Pasadena,CA,USA,2008:2295-2300.
[6]Zhang Peng,Deng Zongquan,Hu Ming,et al.Mobility performance analysis of lunar rover based on terramechanics[C]//Proceedings ofthe 2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Xi'an,China,2008:120-125.
[7]Nagaoka K,Otsuki M,Kubota T,et al.Terramechanics-based propulsive characteristics of mobile robot driven by Archimedean screw mechanism on soft soil[C]//The IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems.Taipei,China,2010:4946-4951.
[8]Iizuka K,Yoshida T,Kubota T.Effect of tractive given by grousers mounted on wheels for lunar rovers on loose soil[C]//Proceedings IECON 2011—The 37th Annual Conference of the IEEE Industrial Electronics Society.Melbourne,Australia,2011:110-115.
[9]林明耀,周谷庆,刘文勇.基于直接反电动势法的无刷直流电机准确换向新方法[J].东南大学学报:自然科学版,2010,40(1):89-94.Lin Mingyao,Zhou Guqing,Liu Wenyong.New accurate commutation method based on direct back-EMF method for brushless DC motor[J].Journal of Southeast University:Natural Science Edition,2010,40(1):89-94.(in Chinese)
[10]杨玉波,王秀和,宋伟,等.油田抽油机用永磁同步电动机性能的环境温度敏感性研究[J].电机与控制学报,2004,8(2):160-164.Yang Yubo,Wang Xiuhe,Song Wei,et al.The research of ambient temperature sensitivity for the performance of PMSM [J].Electric Machines and Control,2004,8(2):160-164.(in Chinese)
[11]樊世超,向树红,冯咬齐.刚性轮与模拟月壤相互作用初步研究[J].航天器环境工程,2009,26(2):107-113.Fan Shichao,Xiang Shuhong,Feng Yaoqi.The interaction between a rigid wheel and lunar soil simulant[J].Spacecraft Environment Engineering,2009,26(2):107-113.(in Chinese)
[12]焦震,高海波,邓宗全,等.基于地面力学的月球车爬坡轮-地相互作用模型[J].机器人,2010,32(1):70-76.Jiao Zhen,Gao Haibo,Deng Zongquan,et al.Lunar rover wheel-terrain interaction model for climbing-upslope based on terramechanics[J].Robot,2010,32(1):70-76.(in Chinese)
[13]Kerui Xia,Liang Ding,Haibo Gao,et al.Motioncontrol-based analytical model for wheel-soil interaction mechanics of lunar rover[C]//Proceedings of the 6th International Forum on Strategic Technology.Harbin,China,2011:333-338.
[14]Ding Liang,Yoshida K,Nagatani K,et al.Parameter identification for planetary soil based on a decoupled analytical wheel-soil interaction terramechanics model[C]//The 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems.St.Louis,USA,2009:4122-4127.
[15]欧阳自远.月球科学概论[M].北京:中国宇航出版社,2005:170-172.
[16]李雄耀,王世杰,程安云.月球表面温度物理模型研究现状[J].地球科学进展,2007,22(5):480-485.Li Xiongyao,Wang Shijie,Cheng Anyun,et al.A review of lunar-surface temperature model[J].Advances in Earth Science,2007,22(5):480-485.(in Chinese)
[17]章跃进,薛波,丁晔,等.表面式永磁无刷电机电枢反应磁场半解析法[J].电工技术学报,2009,24(1):47-51.Zhang Yuejin,Xue Bo,Ding Ye,et al.Semi-analytical approach for armature reaction field of surface mounted permanent magnet brushless motors [J].Transactions of China Electrotechnical Society,2009,24(1):47-51.(in Chinese)
[18]Fazil M,Rajagopal K R.Nonlinear dynamic modeling of a single-phase permanent-magnet brushless DC motor using 2-D static finite-element results[J].IEEE Transactions on Magnetics,2011,47(4):781-786.
[19]刘细平,林鹤云.双定子永磁同步电机齿槽转矩削弱方法[J].东南大学学报:自然科学版,2007,37(4):618-622.Liu Xiping,Lin Heyun.Method for reducing cogging torque in dual-stator permanent magnet synchronous machine[J].Journal of Southeast University:Natural Science Edition, 2007, 37(4):618-622. (in Chinese)
猜你喜欢
军事文摘(2022年18期)2022-10-14
科学大众(2022年17期)2022-09-22
小哥白尼(趣味科学)(2022年6期)2022-08-17
时代汽车(2021年6期)2021-04-09
时代汽车(2021年5期)2021-04-06
青少年科技博览(中学版)(2021年11期)2021-03-07
防爆电机(2020年4期)2020-12-14
百科知识(2019年5期)2019-03-18
北京航空航天大学学报(2017年3期)2017-11-23
太空探索(2016年9期)2016-07-12
