
基于扩张状态观测器的机械臂分散自适应模糊控制
2012-06-28 03:56杜艳丽
东南大学学报(自然科学版) 2012年1期
吴 勇 杜艳丽,2 张 炜
(1北华大学电气信息工程学院,吉林132021)
(2吉林大学汽车动态模拟国家重点实验室,长春130012)
近年来,分散控制在机械臂中的应用越来越广泛.该控制方法结构简单,较集中控制方法相比更适合于模块化的思想.文献[1]针对二阶非线性关联系统设计了基于FNN的自适应输出反馈分散控制器.文献[2]为一个线性时延大系统设计了分散迭代控制器.文献[3]针对一个可重复的非线性关联系统,提出了一种基于模糊系统的分散自适应迭代学习控制方法.文献[4]针对2个构型完全不同的2自由度可重构模块机器人设计了一种基于观测器的分散自适应模糊控制器.文献[5]为一个含不确定性的机器人大系统设计了一个分散神经网络控制器,系统中的耦合交联项和未知非线性项均由神经网络在线估计.
本文为实现机械臂各关节的轨迹跟踪控制,提出了一种基于ESO的分散自适应模糊控制方法.采用ESO去估计机械臂各关节间的交联项及非线性项,并利用模糊系统逼近机械臂动力学模型中的不确定项.最后将该方法应用到了一个4自由度机械臂的轨迹跟踪控制中,验证了该方法的有效性.
1 问题描述
应用Newton-Euler方程,n自由度机械臂的动力学模型为

式中,q∈Rn为关节位置向量,M(q)∈Rn×n为惯性矩阵,C(q,˙q)˙q∈Rn为哥氏力和离心力项,G(q)∈Rn为重力项,τ∈Rn为关节力矩向量.
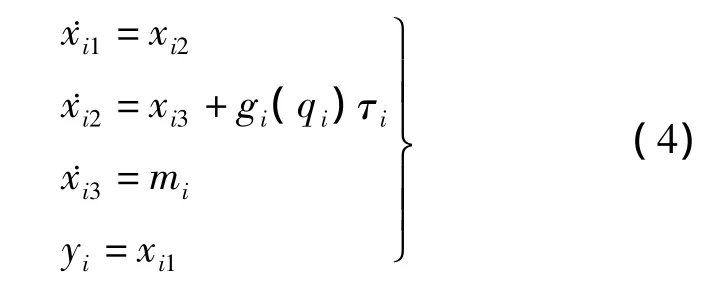
为设计分散控制器,将机械臂的每个关节考虑为一个子系统,其子系统的动力学模型为

式中,


式中,

本文的任务是为每个关节设计合适的控制律,使其跟踪各自的期望轨迹.
2 基于ESO的分散自适应模糊控制律设计
式中,mi为未知量.应用三阶 ESO[6-7],形式如下:

其中,βi1,βi2,βi3为观测器参数,Ki1(·),Ki2(·),Ki3(·)为饱和连续非线性函数,定义如下:

其中,0<α <1,δ>0.
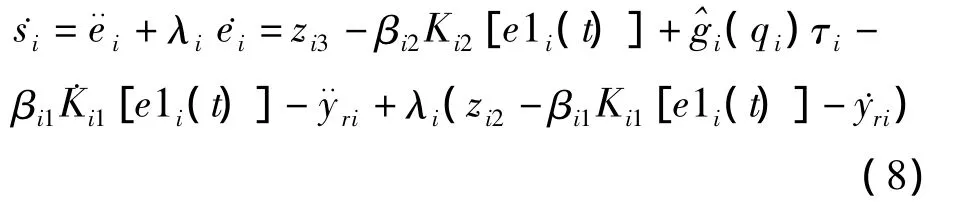
设ei=zi1-yri,其中yri为各关节的期望轨迹.进一步定义一个滤波器误差为

对式(7)求导得
由式(8)得控制律为


uic用来补偿模糊逼近误差,取


其中,ηi1,ηi2为已知常数.将式(9)代入到式(8)中得

假设φi为有界信号,满足为未知常数.
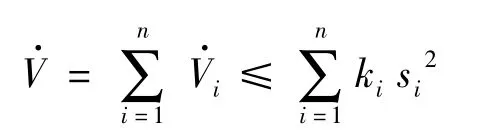
定理考虑机械臂的子系统动力学模型如式(2)所示,应用式(9)所示的分散控制律,则n自由度机械臂系统的轨迹跟踪误差将渐近趋近于零.
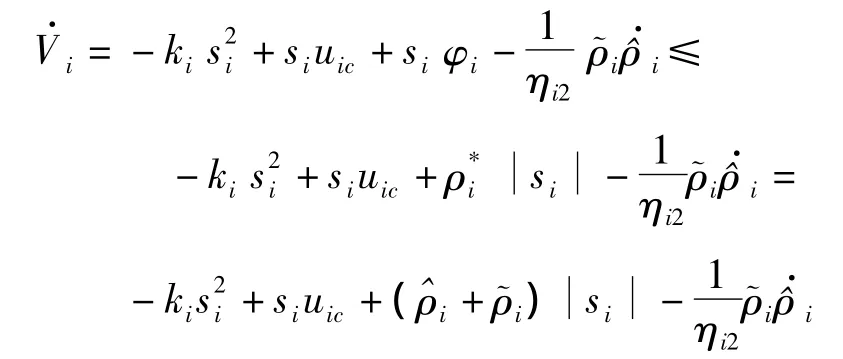
证明定义Lyapunov函数

将自适应律式(11)代入到上式中得
3 仿真研究
为验证所提出方法的有效性,将该定理应用到图1所示的4自由度机械臂中.动力学建模过程参见文献[8].

图1 四自由度机械臂
期望轨迹为
各关节初始位置设置为2,初始速度设置为0;ESO的初始位置设置为1,初始速度及扩张状态初始值设为0.定义模糊集合,相应的隶属度函数为


采用式(9)所示的控制律及自适应律式(10)、(11)和(12),α =0.1,δ=0.01,ηi1=10,ηi2=50,βi1=2,βi2=150,βi3=1 000,λi=100,ki=50.机械臂各关节的轨迹跟踪曲线如图2所示.
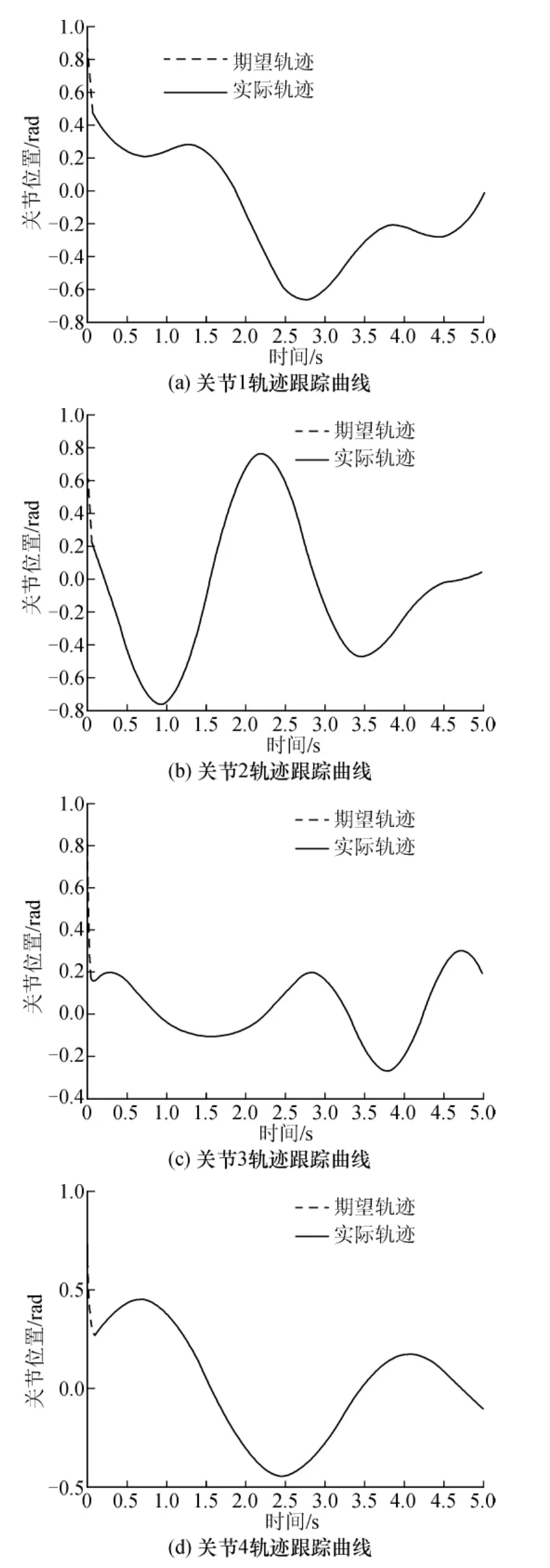
图2 各关节轨迹跟踪曲线
仿真结果表明,由于ESO能够实时地估计机械臂各关节间的耦合交联项,使得基于ESO设计的分散自适应模糊控制系统具有较好的轨迹跟踪性能.
4 结论
本文提出一种基于ESO的机械臂分散自适应模糊控制器.将机械臂系统中的非线性项及交联项定义为系统的扩张状态,而系统中的不确定项由模糊系统进行逼近,控制器中的自适应参数则基于Lyapunov稳定性理论进行更新,可保证整个系统的稳定性和各关节的轨迹跟踪性能.最后通过对4自由度机械臂的仿真,验证了所提出的分散自适应模糊控制器的有效性.
References)
[1]Huang S N,Tan K K,Lee T H.Neural network learning algorithm for a class of interconnected nonlinear systems[J].Neurocomputing,2009,72(4):1071-1077.
[2]Wu H.Decentralized iterative learning control for a class of large scale interconnected dynamical systems[J].J Math Anal Appl,2007,327(23):233-245.
[3]Chien C J,Er M J.Decentralized adaptive fuzzy iterative learning control for repeatable nonlinear interconnected systems[C]//Proceedings of the IEEE International Conference on Systems.Istanbul,Turkey,2006:1710-1715.
[4]朱明超,李英,李元春.基于观测器的可重构机械臂分散自适应模糊控制[J].控制与决策,2009,24(3):429-434.Zhu Mingchao,Li Ying,Li Yuanchun.Observer-based decentralized adaptive fuzzy control for reconfigurable manipulator[J].Control and Decision,2009,24(3):429-434.(in Chinese)
[5]Tan Kok Kiong,Huang Sunan,Lee Tong Heng.Decentralized adaptive controller design of large-scale uncertain robotic systems[J].Automatica,2009,45(2):161-166.
[6]Yan Bingyong,Tian Zuohua,Shi Songjiao,et al.Fault diagnosis for a class of nonlinear systems via ESO[J].ISA Transactions,2008,47(6):386-394.
[7]Yoo D,Yau S S T,Gao Z.Optimal fast tracking observer bandwidth of the linear extended state observer[J].International Journal of Control,2007,80(1):102-111.
[8]朱明超.可重构模块机器人运动学、动力学与控制方法研究[D].长春:吉林大学通信工程学院,2006.
猜你喜欢
防爆电机(2020年4期)2020-12-14
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
铁道科学与工程学报(2015年5期)2015-12-24
电源技术(2015年11期)2015-08-22
