
GPS在青冈县幸福水库工程测量基线处理中的应用
2012-06-26 13:39:00孙丽晶林艳红
黑龙江水利科技 2012年3期
孙丽晶,林艳红
(1.青冈县水务局,黑龙江 青冈 151600;2.黑龙江省水利水电勘测设计研究院,哈尔滨 150080)
GPS全球定位系统是一种精度高、速度快、成本低、操作简单的现代化定位系统,在工程测量中得到了广泛的应用,尤其是在通视不好的情况下,其优点更为明显。下面就青冈县幸福水库工程中应用的具体情况做详细的阐述。
1 具体施测
1.1 测区概况
测区位于青冈县东南部昌盛乡幸福村境内,通肯河右岸幸福大沟中游,有乡道青昌公路至昌盛乡,交通条件一般,为丘陵地形。但外业工作正值春季,冰雪融化,给交通及外业施测带来很大困难。
1.2 外业测量
1.2.1 埋标
坝轴线两端及下游各埋一对标石,因实地情况特殊,坝线为圆弧走向,两端为道路,只能埋在路边。坝线左端标石埋在155 m高程以上。埋设标石均通视良好。所有埋设标石点均联测GPS E级坐标和四等水准,做好点之记,并提交交桩成果。
1.2.2 外业施测
采用1954年北京坐标系。利用测区内附近本院前期埋石03—3、03—4,布设GPS E级网,采用边连式联测4个引测点和4个埋石点。其网形见图1。
外业严格按规范操作,外业观测结束后,进行了内业处理,以下对内业处理进行详细说明。
1.3 内业处理基线
1.3.1 选择坐标系统

图1 GPS控制网观测图
根据任务要求采用1954年北京坐标系,根据E级网精度要求,对卫星高度角(15度)和采样间隔(10s~30s)等进行设置后,进行基线处理,因篇幅有限,网中最弱边观测解算结果见表1。

表1 最弱边观测解算结果表
精度计算公式为:

式中:a为固定误差,在此a=10mm;b为比例误差系数在此b≤20;d为相临点距离,mm,在此把实际解算边长赋予d=175000mm。经计算 α为0.0117m。0.0083<0.0117,所以观测基线解算合格。
基线处理合格后进行GPS网同步环和异步环检查。最弱边所在同步环解算结果见表2。

表2 最弱边同步环解算结果表
同步环(3条基线)相对误差=2.74ppm ΣX=0.0014,ΣY=-0.0019 ,ΣZ=-0.0002。
根据计算精度公式,同步环坐标闭合差检核满足WX≤(√3)/5×σ

异步环坐标闭合差检核满足WX≤(3√n)×σ;WY≤(3√n)×σ;WZ≤(3√n)×σ;Ws≤3×(3√n)×σ
把上述σ=√(a2+(b×d×10-6))2=10.17mm=0.0117 m带入各式,上述解算列表中各项指标满足精度要求。
1.3.2 无约束平差
在基线向量检核符合要求后,以一个点的WGS-84系三维坐标为起算点,进行GPS网平差。本次解算软件选择随机商软件HDS2003进行网平差,在平差中,基线分量的改正数绝对值(V△X、V△Y、V△Z)满足下式:

把上述σ=√(a2+(b×d×10-6))2=10.17 mm=0.0117 m带入各式,上述解算列表中各项指标满足精度要求
1.3.3 约束平差
利用无约束平差后的可靠观测量,选择1954年北京坐标系下进行二维约束平差。在平差中,基线分量的改正数与经过粗差剔除后的无约束平差结果的同一基线相应改正数较差的绝对值 (dV△X、dV△Y、dV△Z)满足下式:

把上述σ=√(a2+(b×d×10-6))2=10.17 mm=0.0117 m带入各式,上述解算列表中各项指标满足精度要求
进行约束平差后,各项指标符合要求。其GPS网精度统计见表3。
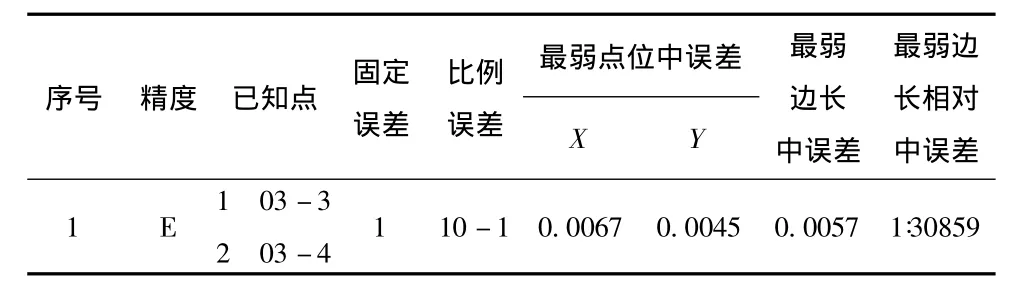
表3 GPS网精度统计
以埋石点为测区首级控制点,利用GPS RTK动态向下布设1∶2 000地形图和1∶500地形图的图根级控制和1∶2 000地形图碎部测量,以及断面施测的控制测量。GPS E级点提供三度带及六度带坐标成果。
1.4 测量中采用的仪表配备
此次测量中采用的仪器配备见表4。

表4 仪器配备表
2 小结
应用GPS定位技术大大地缩短了外业的工作量,基本上解除了在交通不便,通透不好的测区施测的难度。全面布设控制网除了能获很高的精度外,还节省了大量的经费、时间和劳动力。内业处理时也减轻了传统人工施测方法中重复检查,计算工作量巨大的弊端。
[1] 徐绍铨,张海,杨志强,等.GPS测量原理及应用[M].武汉:武汉大学出版社,1998.
[2] 国家测绘局GB/T18314—2009全球卫星定位系统(GPS)测量规范[S].北京:中国标准出版社,2009.
猜你喜欢
小学生学习指导(低年级)(2022年10期)2022-11-05 02:25:08
小学生学习指导(中年级)(2022年4期)2022-04-26 06:34:40
小学生优秀作文(中年级)(2020年6期)2020-07-03 01:42:04
小学生学习指导(低年级)(2020年5期)2020-06-28 09:20:32
水利信息化(2019年4期)2019-09-05 01:48:30
科技资讯(2018年22期)2018-01-29 10:31:40
大陆桥视野·下(2017年6期)2017-09-05 15:34:20
中国科技博览(2017年4期)2017-05-19 08:06:45
职业技术(2015年4期)2015-08-15 00:44:25
建筑设计管理(2014年6期)2014-02-28 08:45:24
