
国产 RIV ADCP 长江流量测验适应性测试
2019-09-05 01:48:30蒋建平朱汉华
水利信息化 2019年4期
蒋建平,朱汉华
(长江水利委员会水文局长江下游水文水资源勘测局,江苏 南京 210011)
0 引言
声学多普勒流速剖面仪(ADCP)具有不扰动流场、连续施测、测流历时短的特点[1],目前在水文测验中已普遍应用,但设备主要依赖进口,存在价格高、采购周期长、维修困难等特点。国内近些年在 ADCP 的研发和产品化方面取得了一些进展,推出了一系列国产 ADCP 产品,2016 年 9 月RIV-600 型 ADCP 通过了水利部新产品鉴定。为了推进国产 ADCP 应用进程,针对国外同频率的ADCP 底跟踪施测流量出现偏小现象,如流量在 70 000 m3/s 时底跟踪施测会偏小近 20%,以及铁质测船导致 ADCP 内部罗经出现偏差,影响到流量计算的准确性等技术问题,长江水利委员会水文局开展了国产 ADCP 多传感器应用的适应性测试。
适应性测试采用一种新的方法,分别将国产RIV ADCP 和同频率的进口 RDI ADCP(作为标准)安装在测船同一侧,均外接 GNSS(全球导航卫星系统)和罗经,并同步进行数据的采集,分析国产RIV ADCP 与进口 RDI ADCP 之间的误差及相关性,检验国产 ADCP 在长江应用的适应性及流量等测量数据的精度。
1 测试
1.1 流量测试设备
流量测试标准采用 RDI WH600 型 ADCP,因该设备在应用于流量基本资料收集前作了大量的比测,精度满足规范要求。国产 ADCP 设备为RIV-600 型 ADCP,主要参数如表1 所示。考虑到测试用船均为铁质,断面流量施测时有“动底”的存在,RDI ADCP 配备了 Trimble SPS461 GNSS 一体化罗经,并开通了 OmniSTAR HP 星站差分服务,水平位置偏差小于 0.15 m。2 套卫星天线安装间距为 1.0 m,罗经定向精度优于 0.25°。RIV-600 型 ADCP 采用的外接定位和定向数据与 RDI ADCP 相同,分频接入。
1.2 流量施测及采用模式选择
流量适应性采用走航式测试,即测船沿测流断面往返横渡,通过施测各点的流速、水深和测船的移动方式测定流量,每测次包含 2 个来回。长江干流断面一般在中高水都存在“动底”现象,且施测均采用铁质船作为平台,为确保流量施测的精度,外接的 GNSS 和外部罗经施测前进行了校正[2-3],并分别施测了底跟踪和 GNSS GGA 跟踪模式下不同的流量,通过计算统计用于国产 ADCP 不同模式的适应性,以及流量、面积、最大流速和水深等特征值的精度评估。当 GGA 跟踪模式流量值大于底跟踪流量值 1% 时,认为有“动底”现象,采用 GGA 模式流量值,反之则采用底跟踪模式值。
1.3 适应性测试
RIV-600 型 ADCP 的适应性测试主要在长江下游干流水文站进行,主要测试 RIV-600 型 ADCP 在有“动底”情况下多传感器接入后的流速、流向及流量等的精度。适应性测试进行了 38 个流量测次测试,测试流量范围为 12 486~70 443 m3/s,测试期间最大断面流速范围为 0.98~2.92 m/s,断面平均含沙量范围为 0.026~0.339 kg/m3,泥沙中数粒径范围为 0.009~0.063 mm。为了验证适应性,以大通站 2017 年 7 月 6 日高水流量(断面平均含沙量为 0.339 kg/m3)为例进行分析。
大通水文站的一次 RIV 与 RDI ADCP 流量比测,断面施测 2 个测回,比测统计如表2 所示。该测次 RDI ADCP 断面平均施测了 471 呯数据(每呯 1.54 s);RIV ADCP 则施测了 1 195 呯数据(每呯 0.60 s),数据量是 RDI ADCP 的 2.5 倍。RDI ADCP 施测底跟踪模式流量值为 56 733 m3/s,GGA 跟踪模式流量值为 70 342 m3/s,底跟踪模式流量偏小 13 609 m3/s,相对偏小 19.3%,说明该断面有明显的“动底”现象。RIV 与 RDI ADCP 底跟踪和 GGA(VTG)跟踪模式航迹线比较图如图1 所示,从图1 可以看出,底跟踪和 GGA(VTG)跟踪模式的航迹线明显不重合,而且底跟踪航迹线明显偏离在断面上游,说明断面有“动底”现象,底跟踪模式下流量会偏小。而图1 a 和 b 坐标和图形的差异,主要是 2 个软件显示的设置参数导致。在底跟踪模式下,RIV 与 RDI ADCP 流量最大相对误差为 1.72%,平均相对误差为 0.43%; 在 GGA 跟踪模式下,两者最大相对误差为 -0.61%,平均相对误差为 -0.28%,2 种模式下平均流量相差均小于 ±1%。

表2 RIV 与 RDI ADCP 流量比测统计表

图1 RIV 与 RDI ADCP 底跟踪和 GGA (VTG) 模式航迹线比较图
对测次施测的断面流向、面积及平均流速统计分析其相关性,比测统计如表3 所示。在 GGA 模式下 RIV 和 RDI ADCP 施测的断面流向半测回最大差值的绝对值为 0.45°,测次平均流向差值的绝对值为 0.21°;施测的断面面积半测回最大相对误差绝对值为 0.46%,测次平均相对误差绝对值为 0.25%;施测的断面平均流速半测回最大相对误差为 0.22%,平均相对误差绝对值为 0.03%,说明 2 种设备施测的结果基本一致。

表3 RIV 与 RDI ADCP 断面流向、面积和平均流速比测统计表
再检查分析底跟踪和 GGA 模式下断面流速等值图, RIV 与 RDI ADCP 底跟踪和 GGA 模式下断面流速等值比较图如图2,3 所示。从第 1 半测回数据回放可以看出,RDI ADCP 在施测时中间有几处底跟踪失效,而 RIV ADCP 相对数据齐全。但 ADCP 底跟踪模式下,RDI ADCP 施测的断面水深存在 4 个波束施测相差不一致,导致水深数据有锯齿现象;而 RIV ADCP 施测的水深变化过程平缓光滑。GGA 模式下 2 款 ADCP 断面流速都渐变均匀,说明软件中具有外接设备校正和解决“动底”导致的流量偏小现象功能。RIV 与 RDI ADCP 底跟踪和 GGA 模式下断面流速矢量线比较分别如图4,5 所示,从图4 和 5 中可以看出,RIV 与 RDI ADCP 底跟踪速度下流速有一点差异,RDI ADCP 数据的缺失主要是底跟踪有几处失效导致,但 GGA 模式下施测的断面平均流速过程基本一致,且 RIV ADCP 数据明显密集,这说明施测垂线的数据明显多于 RDI ADCP。
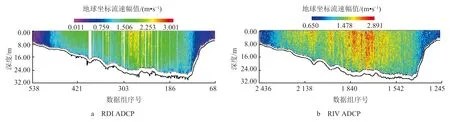
图2 RIV 与 RDI ADCP 底跟踪模式下断面流速等值比较图

图3 RIV 与 RDI ADCP GGA 模式下断面流速等值比较图
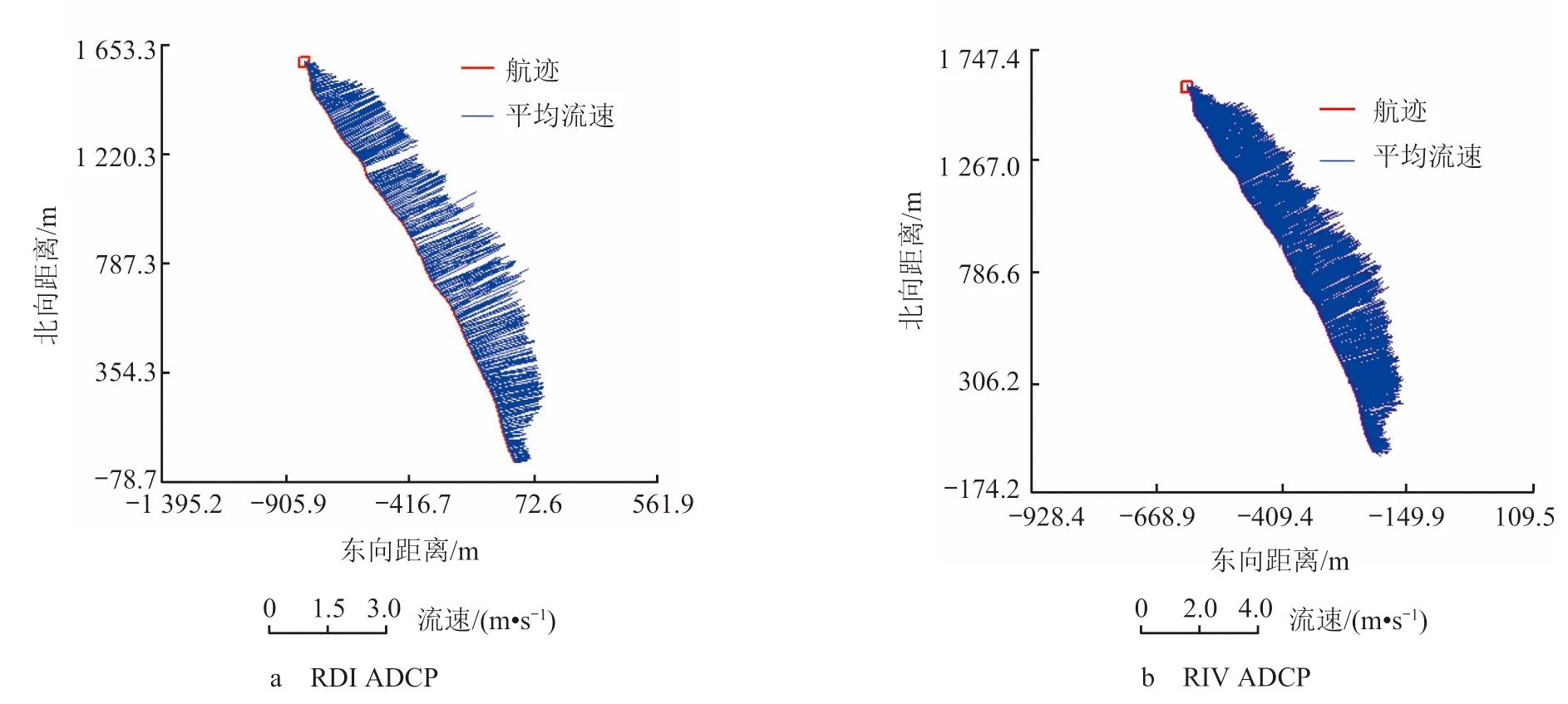
图4 RIV 与 RDI ADCP 底跟踪模式下断面流速矢量线比较图

图5 RIV 与 RDI ADCP GGA 跟踪模式下断面流速矢量线比较图
2 断面流量精度分析
RIV 与 RDI ADCP 共进行 38 测次流量比测(含底跟踪和 GGA 2 种模式),流量比测比较图如图6 所示,流量相对误差统计图如图7 所示。比测流量范围在 12 486~70 443 m3/s 之间,单次流量比测相对误差范围为 -2.28%~2.86%,系统误差为 -0.83%,总随机不确定度为 2.28%。通过分析,流量测验单次流量允许误差满足一类站中水位级总随机不确定度小于 6%,系统误差在 -2%~1% 之间的要求,符合规范[4]的要求。
3 结语
通过断面流量和流向、面积等特征值比测,得出 RIV-600 型 ADCP 主要结论如下:RIV-600 型ADCP 在长江下游干流断面流量 70 443 m3/s 以下(断面平均含沙量为 0.339 kg/m3)出现“动底”后,具有与 RDI WH600 型 ADCP 解决流量偏小相同的功能,外接的 GNSS 和罗经通过校正后施测的流量、流向、断面和平均流速等特征值数据精度与进口 RDI WH600 型 ADCP 相当,满足规范精度要求。RIV-600 型 ADCP 数据更新率明显高于 RDI ADCP 设备,但没有浅水高精度测量模式,软件图表输出及显示功能等存在不足和不规范现象,还需进一步完善。总之,RIV-600 型 ADCP 主要性能和功能满足长江下游流量在 70 443 m3/s(低含沙量)以下测验,可替代进口 ADCP 用于流量测验基本资料收集。

图6 RIV 与 RDI ADCP 流量比测比较图
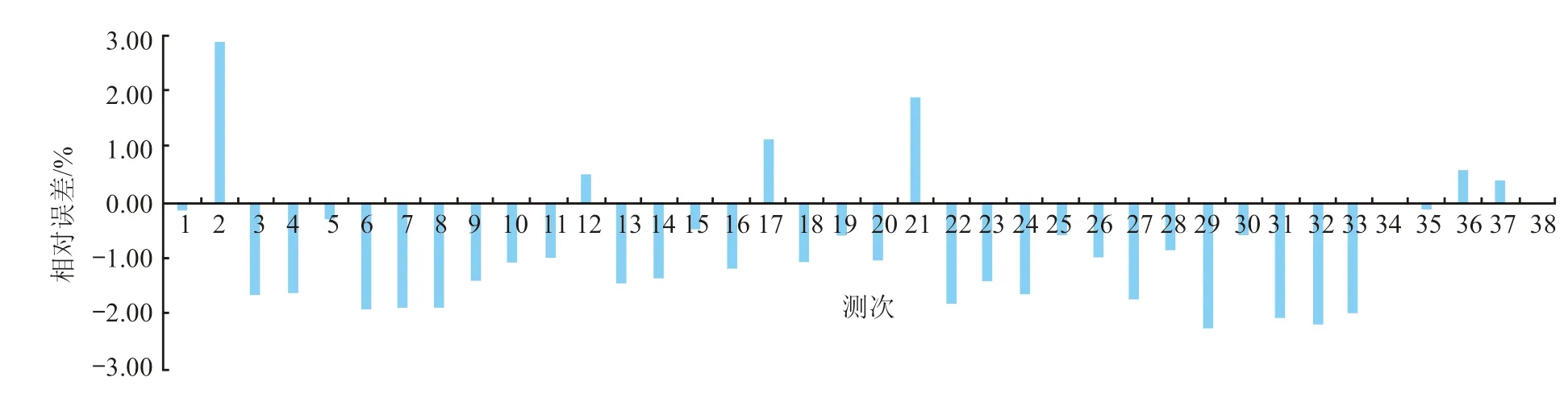
图7 RIV 与 RDI ADCP 流量相对误差统计图
猜你喜欢
农业科技通讯(2023年1期)2023-02-12 07:07:54
交通企业管理(2022年5期)2022-09-02 06:55:18
治淮(2021年6期)2021-08-05 08:55:56
航空动力(2020年6期)2021-01-05 09:02:50
中国外汇(2019年23期)2019-05-25 07:06:20
北京航空航天大学学报(2016年9期)2016-11-16 02:02:33
职业技术(2015年4期)2015-08-15 00:44:25
现代检验医学杂志(2015年6期)2015-02-06 01:43:55
职业教育研究(2012年11期)2012-06-19 12:13:10
武警医学(2012年11期)2012-03-19 13:40:07
