
相对定向中错误匹配的剔除方法研究
2012-06-26 07:39王琳陈楚吴正鹏张力艾海滨
城市勘测 2012年4期
王琳 ,陈楚,吴正鹏,张力,艾海滨
(1.天津市测绘院,天津 300381; 2.中国测绘科学研究院,北京 100830)
立体像对的相对定向就是要恢复摄影时相邻两影像摄影光束的相互关系,从而使同名光束对对相交[1]。目前,数字影像的全自动相对定向已不再仅仅利用传统的6 点,而是通过匹配的方法获得相当多的点来完成。然而,匹配点集中不可避免地会存在错误匹配,影响到相对定向结果的准确性,甚至导致相对定向不收敛或错误。本文提出一套自动相对定向的流程,重点介绍了其中的误匹配剔除方法。实验结果表明,本文提出的误匹配剔除方法具有很高的鲁棒性,能有效将误匹配滤除,保证了相对定向结果的正确性。
1 自动相对定向流程
本文提出的自动相对定向流程如图1所示,首先,构建立体像对的金字塔影像序列以减少搜索匹配时间,最高层金字塔影像采用SIFT 匹配[2];匹配点集中不可避免地存在错误匹配,需要将这些错误匹配剔除,并根据得到的正确匹配获得精度较低的初始相对定向元素和相邻影像的重叠区域;为保证特征点分布的均匀性和提高相对定向精度,将重叠区域的金字塔影像均匀划分为固定大小的网格,在每个网格内采用Förstner 算子提取影像中明显的特征点;通过核线约束和仿射变换,在预测得到的同名像点概略位置上,采用带核线几何约束条件的近似一维影像匹配[3]寻找相邻两张影像上的同名像点;经过逐层金字塔影像匹配,在原始影像上通过最小二乘匹配法来精细化匹配结果;最后,通过多次相对定向,删除误差较大的同名像点,同时获得相对定向元素。
本文通过图1所示的方法对大量无人机影像以及大航片影像进行实验,自动相对定向失败的原因经分析如下:①影像中存在了大量的重复性纹理或无纹理,如大面积麦田和水域,使得SIFT 匹配后的正确点对数量很少;②在图示的第3 步中,没能将错误匹配有效剔除,致使后续匹配得到的正确点对数量很少,导致相对定向失败。因此,研究一种有效的误匹配剔除方法对保证自动相对定向的成功率具有重要的意义。

图1 自动相对定向流程
2 最小中值平方法
在计算机视觉中,提高匹配正确率的方法通常是采用RANSAC 原理[4]和基本矩阵估计[5],如最小中值平方法[6],具体计算过程[7]如下:
(1)从匹配点集中任取s 个样本,每个样本由p 个匹配点构成,计算:

其中,ε 是整个匹配集中含有错误匹配比例的估计值;P 是m 个样本中至少含有一个正确样本的概率,且必须接近于1。
(2)对样本J 用8 点法解出一个基本矩阵FJ,J=1,2,…,s。
(3)设有N 对特征点,对每个FJ从整个点集中得出一组平方残差,并从中选出一个中值,用MJ表示,即:

(4)从所有MJ中找出最小者,记为MM,其对应的基本矩阵为FM。

其中,ri是平方残差,且Fmi)2,wi为加权值,权值为0 的匹配是错误匹配,将被去除。
3 改进的误匹配剔除方法
本文结合最小中值平方法的原理,利用RANSAC的相对定向法剔除误匹配,其基本思想如下:在输入的原始匹配点集中,随机抽取P 个匹配点对,计算相对定向元素和相对定向中误差;相对定向中误差的大小能在一定程度反映选取匹配点集的正确性[8],但仍可能陷入局部最优,同时核线约束不是唯一性约束,因此本文同时利用选取的P 个匹配点对计算仿射变换约束参数,以加强约束力度;为提高效率,本文采用金字塔影像,并在其顶层提取Förstner 特征,利用仿射变换参数进行灰度匹配以提取两幅影像的同名点;在这些同名点中,求取满足核线约束的同名点,并记录个数;认为最多同名点个数对应的P 个匹配点对和相对定向元素最为可靠,因此以这P 个匹配点对作为指导找出原始匹配点集中正确的匹配点对,接着根据找出的所有匹配点对计算相对定向元素,获取相对定向元素的初始值。误匹配的具体剔除过程如图2所示。

图2 相对定向的误匹配剔除流程图
4 实验与分析
本文做了两组实验,一组是对低空遥感影像立体像对进行的实验,一组是其和最小中值平方法的对比实验。

图3 SIFT 匹配得到的初始匹配点对

图4 误匹配剔除之后的结果图

图5 最终得到的相对定向点
图3为自动相对定向流程(图1所示)中第2 步得到的匹配结果,共126 个匹配点对。图4是误匹配剔除之后得到的结果,得到了108 个匹配点对,从图中可以看到本文方法有效的剔除了误匹配,改善了匹配结果。根据图1所示的自动相对定向流程,最终得到的相对定向结果如图5所示。
最小中值平方法中基本矩阵的计算只使用了当前“最好”的匹配点对[9],丢失了其他可能正确的候选匹配信息,容易陷入局部最优。另外,极线几何约束是一种较弱的约束,满足极线距离准则的匹配并不一定符合立体成像的几何模型,笔者经常发现一些明显不匹配的点也能很好的满足极线几何约束。本文根据所随机选取的点对为指导去匹配更多的点对,以匹配点对数量的多少判定随机选取点对的可靠性。分别采用最小中值平方法和本文方法各独立运行100 次,每次从匹配点集中随机抽取5 000个样本。如表1所示,在这100 次实验中,最小中值平方法有13 次不能将错误匹配点剔除,本文方法每次均成功将错误匹配剔除。这在一定程度上说明了采用本文方法有更好的鲁棒性。
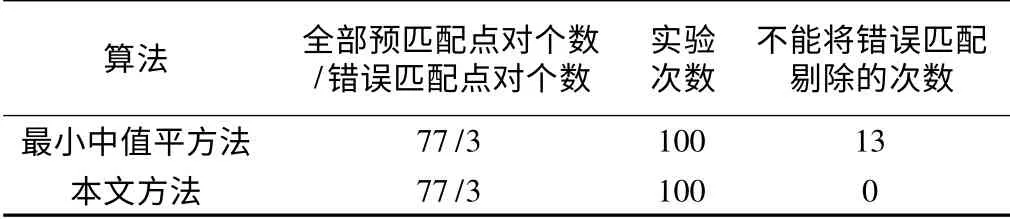
表1 最小中值平方法和本文方法的鲁棒性比较表
5 结 语
本文提出了一套自动相对定向流程,重点介绍了基于RANSAC 误匹配剔除的方法,分析了其对保证自动相对定向成功率的意义。为防止在误匹配剔除过程中相对定向结果陷入局部最优,本文采用根据所随机选取的点对为指导去匹配更多的点对,以匹配点对数量的多少判定随机选取点对的可靠性。对低空遥感影像像对的实验及与最小中值平方法的对比实验表明,本文方法能有效地将误匹配进行剔除,保证了相对定向结果的准确性,并在鲁棒性方面得到了一定提高。为进一步提高本文方法的鲁棒性,将确定性退火方法和RANSAC 算法结合使用,有效保证相对定向结果的正确性,是下一步的研究重点。
[1]金为铣,杨先宏,邵鸿潮等.摄影测量学[M].武汉:武汉大学出版社,2001.
[2]王琳.高精度、高可靠的无人机影像全自动相对定向及模型连接研究[D].北京:中国测绘科学研究院,2011.
[3]DAVID G.Lowe.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision.2004,60(2):91 ~110.
[4]张永生,巩丹超,刘军等.高分辨率遥感卫星应用-成像模型、处理算法及应用技术[M].北京:科学出版社,2004:80 ~121.
[5]FISCHLER M A,BOLLES R C.Random sample consensus:A Paradigm for model fitting with applications to image analysis and automated cartography[J].Communications ACM,1981,24(6):381 ~395.
[6]马颂德,张正友.计算机视觉-理论与算法基础[M].北京:科学出版社,1997.
[7]ZHANG Z Y,DERICHE R,FAUGERAS O,et al.A robust technique for matching two uncalibrated images through the recovery of the unknown epipolar geometry[J].Artificial Intelligence,1995,7(8):87 ~119.
[8]周骥,石教英,赵友兵.图像特征点匹配的强壮算法[J].计算机辅助设计与图形学学报,2002,14(8):754 ~757.
[9]武汉大学测绘学院.误差理论与测量平差基础[M].武汉:武汉大学出版社,2003.
[10]蔡涛,李德华,关景火.非标定图像的最优匹配方法[J].计算机工程与应用,2004:3 ~5,229.
猜你喜欢
西江月(2021年3期)2021-12-21
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
数学学习与研究(2018年5期)2018-03-28
教育教学论坛(2017年34期)2017-08-30
星海音乐学院学报(2017年3期)2017-08-24
数学学习与研究(2016年21期)2017-05-08
连环画报(2016年10期)2016-12-16
广东技术师范大学学报(2016年5期)2016-08-22
项目管理技术(2016年12期)2016-06-15
