高动态多进制扩频信号的载波跟踪技术研究
2012-06-25 03:31黄烈超张天骐谭方青
电视技术 2012年3期
黄烈超,张天骐,谭方青,余 熙
(重庆邮电大学信号与信息处理重庆市重点实验室,重庆 400065)
由于扩谱技术具有很强抗的干扰、低截获概率性等优点[1],因而其在军用通信、武器制导系统等军事领域得到了广泛应用。扩频通信中最重要的问题是对载波和伪码的捕获与跟踪。在高动态环境中,由于载体机动引起的多普勒频偏对载波的捕获和跟踪带来了许多问题,国内外专家和学者围绕载波的捕获和跟踪进行了大量研究,但多是围绕低动态、低码率的信号展开。
常用的载波跟踪方法主要是Costas环[2]和锁相环(PLL)[3],前者也是锁相环的一种。PLL直接跟踪载波相位,具有良好的相位跟踪精度和抗噪声能力,但是在高动态的情况下,由于多普勒频移的影响较大,PLL的跟踪精度将会降低,只能通过增加环路带宽来应对。而环路带宽的增大必然会引起噪声的增加,因此还会影响跟踪精度。锁频环(FLL)只是跟踪载波频率,鉴频器的输出是载波频率跟踪误差,具有较好的动态性。基于PLL和FLL的优点以及高动态环境中的多进制扩频信号的特性,笔者提出了FLL和PLL相结合的载波跟踪方案,建立了基于FLL和PLL的多进制扩频系统的载波跟踪数学模型,最后利用Matlab对整体环路进行仿真,分析环路的跟踪性能。
1 锁频环和锁相环的数学模型及基本原理
扩频通信中载波的同步包括载波的捕获和跟踪,载波的捕获通常采用FFT获得粗略的载波频率[1,4],再利用FLL和PLL实现载波的频率跟踪和相位跟踪。
1.1 锁频环
锁频环通常采用叉积自动频率跟踪算法(CPAFC)[5]来实现对载波频率的跟踪,其基本原理框图如图1所示。
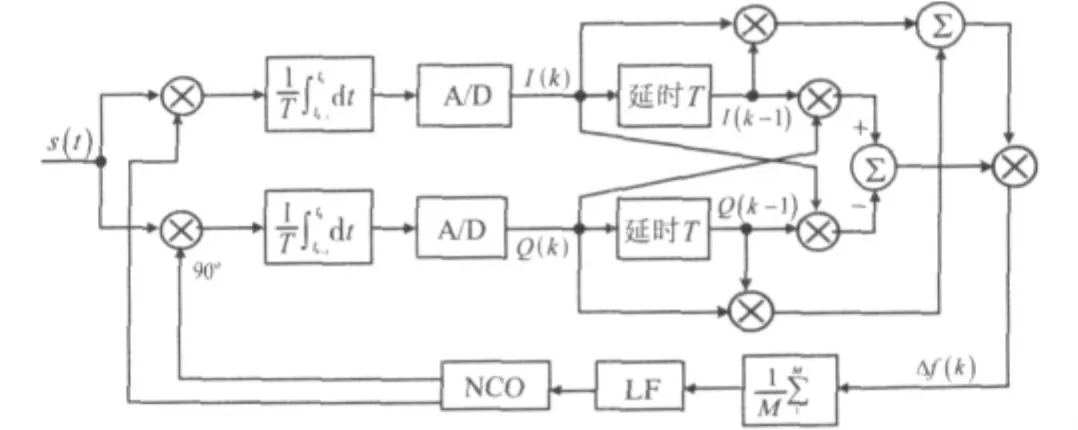
图1 CPAFC基本原理图
设输中频信号经混频,积分清除后得到的信号为
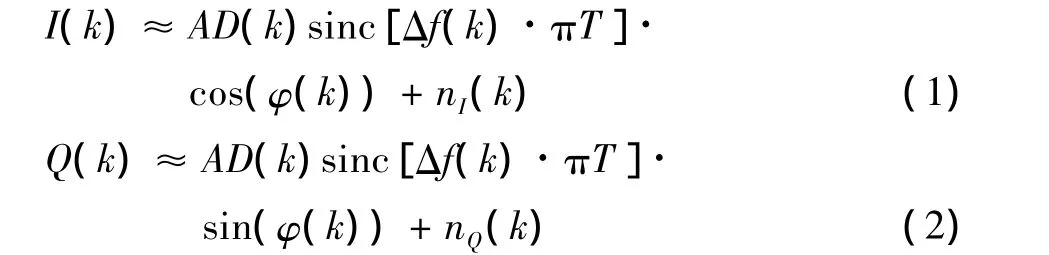
式中:D(k)为数据位;Δf(k)为输入载波信号与本地载波信号的频偏;T预检积分时间;nI(k),nQ(k)分别为同相和正交支路的噪声。
两路正交信号的点积Dot(k)和叉积Cross(k)分别为

CPAFC的误差控制函数可以表示为
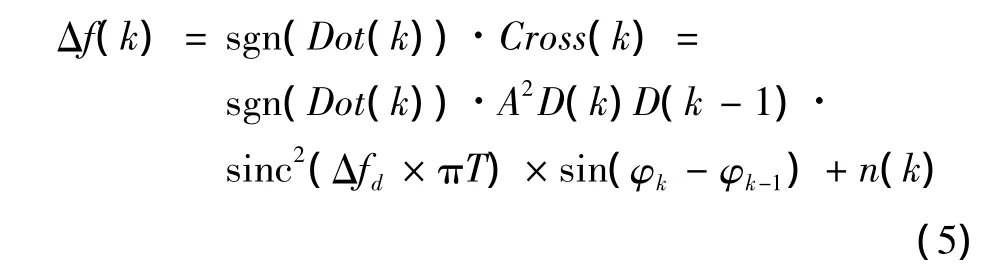
式中:假设D(k)=D(k-1),则D(k)D(k-1)=1;Δfd为多普勒角频率残差,且Δfd=Δfd(k)-Δfd(k-1);φk=Δfd×t+φ0,连续采样相位变化为φk-φk-1=[Δfd(k)-Δfd(k-1)]T= ΔfdT;当≪时,sinc2(Δfd×πT)≈1,sin(φk- φk-1)≈φk- φk-1。由此误差控制量来控制载波VCO调整频率产生,以达到跟踪频率的目的。
1.2 锁相环
锁相环直接跟踪载波的相位,由于Costas环对载波调制数据不敏感而在扩频接收机中得到广泛应用,其原理框图如图2所示。
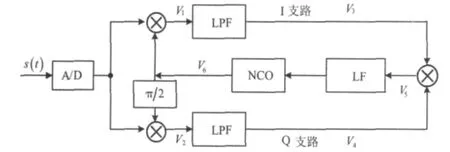
图2 Costas环基本原理图
为了便于分析,不考虑噪声的影响,假设输入信号是幅度为1的中频载波信号,经A/D采样后为

本地载波振荡器产生的同相支路和正交支路分别为

式中:T为采样周期;ω为载波频率;φ1为载波初始相位;φ2(kT)为k时刻本地载波的估计相位。令φe(kT)=φ1(kT)-φ2(kT)是k时刻本地载波和输入信号的误差相位。
两个支路的低通滤波器滤掉V1,V2的高频分量,减小了信号带宽,得到
所以误差信号V5为

式中:输出信号与sin(2φe(kT))成正比,经环路滤波后,去控制NCO,使V6跟踪输入载波,当φe(kT)→0时,认为实现载波同步。
2 环路滤波器(LF)
环路滤波器在载波跟踪环路中有着非常重要的作用,不仅具有低通滤波作用,更重要的是对环路参数调整起着决定性作用。文献[6]对各种常用的环路滤波器做了详细介绍。根据锁频环和锁相环原理部分的分析和高动态环境的特点,本文采用理想二阶数字滤波器,其原理框图如图3所示。
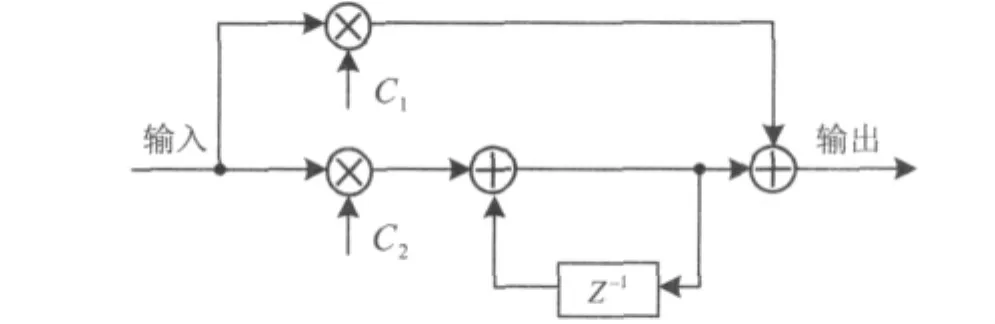
图3 理想二阶数字环路滤波器的基本原理框图
图中C1,C2是滤波器两个重要的参数,这两个参数是由滤波器的噪声带宽、时间周期和阻尼因子决定的,式(14)和式(15)为C1,C2的计算公式,详细推导见文献[7]。
式中:ωn为环路固有振荡频率,通常在设计时用滤波器的噪声带宽BL来取代ωn,BL=(1+4ξ2);T 为相干积分时间;ξ为阻尼因子,常取经验值ξ=0.707;Kd,K0分别为鉴别器和压控振荡器的增益。
3 多进制扩频系统载波跟踪方案
对于多进制扩频系统,在高动态环境下由于加速度引起的多普勒频偏变化,在初始捕获时无法仅通过FFT频率引导来实现载波的跟踪,所以为了能够正确地在接收端得到传输的信息,除了需要对码相位跟踪外,还需对载波进行跟踪,从而进一步减小初始捕获后的残余频偏,因此这就需要一种快速的闭环跟踪算法,既能容忍接收机载体的高动态效应又能达到较高的跟踪精度。通过上述对CPAFC和Costas的分析,笔者提出了FFL与PLL相结合的多进制扩频载波跟踪方案。
多进制扩频系统采用M条相互正交的扩频序列,为了满足扩频码数量和相关特性的要求,通常采用m序列的位移序列作为多进制扩频系统的扩频码,与扩频码互为优选对的另一条m序列作为扰码,这样则可以认为同族Gold序列作为扩频码。由于采用M条扩频序列,所以载波跟踪环中相关器的数目也就增加了M倍,文献[8]提出了一种减少相关值个数的方法是将M个相关器的输出相加,然后送入载波跟踪环路,但是由于同族Gold序列的互相关值不为0,相关值累加后的峰值就会下降,导致抗噪声性能变差。根据伪随机序列的自相关和互相关特性,可以直接比较M个相关值,经数据选择器选择出最大包络值对应的相关值输入到载波跟踪环路,然后经过环路滤波器处理后控制载波NCO。多进制扩频系统载波跟踪原理如图4所示。
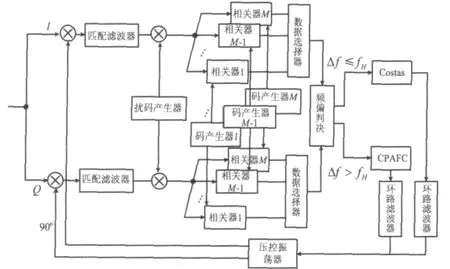
图4 多进制扩频系统载波跟踪原理框图
接收信号分别经I、Q两路进行下变频和匹配滤波,再经过解扰后与本地PN码进行相关运算,数据选择器从M个相关值中选择最大值进入载波跟踪环路。在高动态情况下,信号的捕获为环路跟踪提供了一个初始值,先经过锁频环跟踪较大的滤波器带宽闭合跟踪环路,消除动态的频差,然后转入科斯塔斯环跟踪载波的相位。信号跟踪过程中,锁频环的输出不断地调整载波数控振荡器(NCO),使得多普勒频差不断减小。当环路的跟踪误差小于一定的阈值后,则转入科斯塔斯环进入载波相位的跟踪过程。当动态性变化时,自动实现锁频环和锁相环跟踪方式的切换。通过上述分析,锁频环与锁相环相结合的载波跟踪方式既能实现高动态下环路的锁定,又能保证很高的跟踪精度。
4 仿真结果
利用Matlab软件对CPAFC和Costas相结合的方式进行载波频率和相位的跟踪。仿真条件为:本振和载波信号的频偏为2 kHz,初始相差为,相干积分周期T=0.01 s,PN码长度为1023的Gold序列,采样速率为1.023 MHz,调制方式为BPSK调制,仿真结果如图5所示。

图5 CPAFC环跟踪载波频偏
由图5可知,经过0.004 s载波频率跟踪误差从初始的2 kHz降到0值附近,也就是说本振载波频率变化看以看作0。这时根据频偏判决,转到Costas环路进行载波的相位跟踪,如图6所示。经过0.0045 s左右,相位误差从降到0值附近,Costas环跟踪到载波的相位,跟踪误差不超过0.02°。

图6 Costas环跟踪载波相位
5 总结
本文针对高动态环境下多进制扩频信号的载波跟踪,采用FLL与PLL相结合的方式实现载波的跟踪,一方面利用FLL较好的动态性能,进行载波频率的跟踪,另一方面利用PLL的高跟踪精度,进行相位跟踪,由此两者相结合可以满足动态性能和跟踪精度的要求。最后,通过计算机仿真表明,此环路能快速、精确地跟踪载波信号。
[1]程乃平,任宇飞,吕金飞.高动态扩频信号的载波跟踪技术研究[J].电子学报,2003,31(12):2147-2150.
[2]吴永波,韩莉,宋建材,等.直接序列扩频系统中数字Costas环的设计与实现[J]. 中国惯性技术学报,2006,14(6):5-7.
[3]刘艳丽,张天骐,张伟,等.基于双PLL的大频偏直扩信号的载波跟踪[J]. 电视技术,2009,33(S2):146-149.
[4]邓晓东,孙武.基于FLL+PLL的载波跟踪环路设计[J].现代防御技术,2010,38(4):137-141.
[5]NATALI F.AFC tracking algorithms[J].IEEE Trans.Communications,1984,32(8):935-947.
[6]张厥盛,郑继禹,万心平.锁相技术[M].西安:西安电子科技大学出版社,1994.
[7]张欣,姚庆爽.扩频通信数字基带信号处理算法及其VLSI实现[M].北京:科学出版社,2004.
[8]HIRAMATSU T,MAEDA Y.Code tracking loop for M-ary/SS systems using outputs addition of correlators[J].Transactions of the Institute of Electronics,Information and Communication Engineers,2004,87(11):1434-1441.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
上海公路(2018年4期)2018-03-21
现代工业经济和信息化(2016年8期)2016-05-17
电测与仪表(2016年5期)2016-04-22
西部广播电视(2015年10期)2016-01-18
电测与仪表(2015年9期)2015-04-09
电测与仪表(2014年15期)2014-04-04
电测与仪表(2014年8期)2014-04-04
电测与仪表(2014年8期)2014-04-04
现代防御技术(2014年6期)2014-02-28