
新型快速传递对准方法
2012-06-22 06:59韩英宏陈万春
北京航空航天大学学报 2012年2期
韩英宏 陈万春
(北京航空航天大学 宇航学院,北京 100191)
新型快速传递对准方法
韩英宏 陈万春
(北京航空航天大学 宇航学院,北京 100191)
针对惯性导航系统的动基座传递对准问题,提出了速度加姿态加角速率组合匹配法.用来自主、子惯导的3组参数信息作观测量,通过卡尔曼滤波法迅速准确地估计出失准角及安装误差角等状态量,以便精确地对子惯导系统进行初始化.根据传递对准的基本原理,设计了载体结构挠曲运动统计模型,建立了状态方程及量测方程.同条件仿真结果表明:这种方法与速度加姿态匹配和速度加角速率匹配的对准精度相当,但估计速度约为这两种方法的2倍.可用于机载或舰载战术导弹武器系统,有效减小导航误差和制导误差.
惯性导航系统;传递对准;速度加姿态加角速率;匹配方法
对于包含有主、子惯导系统的战术导弹武器系统,为满足子捷联惯导系统初始对准的精确性及快速性要求,传递对准是最常用的方法,而动基座的传递对准一直是研究的热点和难点.根据传递对准方法匹配量的不同,可以将其分为测量参数匹配、计算参数匹配及组合参数匹配3类.测量参数匹配包括角速率匹配、比力匹配和姿态匹配,由于直接从惯性器件获得观测量,所以具有速度快的优势,但受载体弹性变形影响较大,计算精度较低.计算参数匹配包括速度匹配、位置匹配等,由于观测量对惯性器件的输出进行了积分,可以将正负误差部分抵消,所以其具有精度高的优点,但由于计算量大,计算时间较长.结合两种单参数匹配的优点,选择计算参数和测量参数的组合作为观测变量[1-2],便是组合参数匹配法,常用的有速度加姿态匹配、速度加角速率匹配等.
速度加姿态匹配法[3]由于能够迅速精确地估计初始失准角,而且具有附加机动简单的特点,从1989年被提出之后被广泛的研究,并在很多工程项目中都得到了较好的应用.但由于此法对准时间很短(10 s),无法准确估计出各器件误差.速度加角速率匹配[4]的特点是能够在较短的时间内估计出仪器误差,如陀螺仪的标度因子等,从而有效减小导航误差.但角速率匹配对挠曲变形比较敏感,挠曲模型的设计对其速度和精度都有较大的影响,且角速率匹配只适用于主子惯导均为捷联系统的对准.本文利用更多的信息,将速度、姿态和角速度组合起来作为观测量,用卡尔曼滤波[5-6]的方法对状态量进行估计.在载体作Wing-Rock机动情况下,对以上3种不同的组合匹配法进行了仿真分析,结果比较表明此种组合匹配法失准角的估计时间约为其他2种方法的一半.
1 模型建立
根据图1所示的基本原理图,设计整个传递对准模型.

图1 传递对准原理图
1.1 状态方程
模型中考虑了两个导航系之间的失准角和惯性器件组的安装误差角以及挠曲变形运动,速度和失准角的微分方程[7]如下:
在主惯导和子惯导组件之间存在着固定的安装误差角φ,由于传递对准时间较短,将其看作随机常数,即

阵风或载荷变化等引起载体挠曲物理建模复杂且不实用[8],一般是根据实验数据建立随机统计模型[9],本文用白噪声激励的二阶Markov过程来表示,具体如下:


βi,σi,Qηi之间的关系为

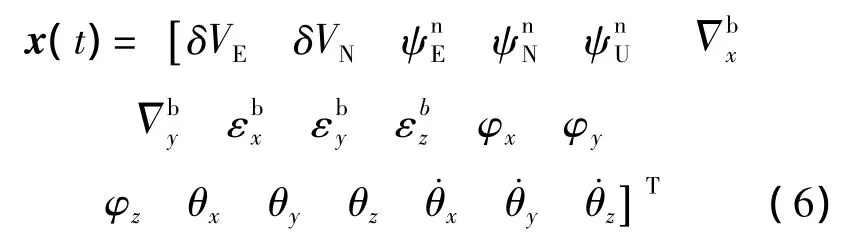
选取状态变量为
白噪声:

这样可得状态方程:

对应的状态矩阵A()t




由于天向通道是发散的,本文没有考虑其耦合作用,认为载体保持某一高度不变,只选择了东向速度δVE和北向速度δVN两个水平分量作为状态量.
1.2 量测方程
速度匹配方程为

姿态匹配方程为

角速率匹配方程为

量测方程:

观测量选为

对应的量测矩阵为

2 仿真分析
仿真参数设置如表1所示.

表1 仿真参数设置
将3种匹配方法放在同一个模型里面进行仿真,载体滚转角速率作以5 s为周期15°为幅值的正弦变化,在滚动10s之后作匀速直线飞行,仿真结果如图2~图5所示.
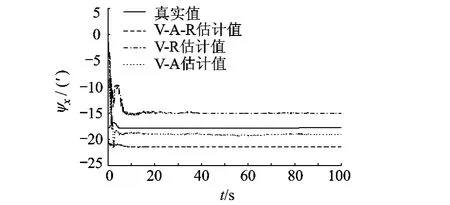
图2 东向失准角估计

图3 北向失准角估计

图4 航向失准角估计
从图2可以看到,速度加姿态加角速率匹配法对东向失准角估计误差和速度加角速率匹配法差不多(约为3'),都大于速度加姿态匹配的估计结果误差(约1');图3显示出北向失准角估计中速度加姿态匹配和速度加姿态加角速率匹配的结果非常接近(约3'),要小于速度加角速率匹配的估计误差(约5');从图4中可以得知航向失准角速度加角速率匹配法估计的精度最高,速度加姿态匹配的估计稍差.综合来看,3种方法对失准角的估计误差都没有超过5',精度相当.但是速度加姿态加角速率匹配法传递对准有一个明显的优势——估计速度非常快,东向和航向失准角估计曲线尤为明显,约为其他2种组合匹配法估计速度的2倍,这一结论通过表2中的数据也得到了很好的证实.
图5是对3个方向的固定安装误差角估计,真实值均设为6'.可以看到,速度加姿态加角速率匹配法的估计误差都在2'之内,速度加姿态匹配法对z向安装误差角的估计误差大于2',速度加角速率匹配对y向安装误差角估计出现异常,通过仿真分析证明此法对于机动形式变化非常敏感,估计结果不稳定.

图5 固定安装误差角估计
其余状态量的估计结果此处不再一一列出.
在同一台PC机上进行仿真运算,由于模型中含有随机误差模型,所以同一种匹配方法的计算时间也不完全相同,但变化范围不大.经多次仿真统计,在上述条件下,速度加姿态匹配法和速度加角速率匹配法需要的计算时间为60 s左右,由于观测量的增加,速度加姿态加角速率匹配法需要的计算时间稍长,在73s左右.改善弹载计算机的硬件水平,不同匹配方法的计算时间差别将缩短,有利于多个匹配量的传递对准方法的应用.

表2 失准角估计均方差(1σ)
3 结论
通过仿真结果可以看到,速度加姿态加角速率匹配法对失准角的估计误差小于5',对安装误差角的估计误差小于2',其在5s内便可以稳定地估计出各状态量,相对于其他2种组合参数匹配法,具有明显的估计速度优势.综合来看,此动基座传递对准法具有较好的快速性、精确性和鲁棒性,使基于载体的战术导弹武器系统的捷联惯导初始化得到进一步改善,从而提高导弹单独飞行时的导航与制导精度.
致谢 感谢航天二院二部对本文研究工作的支持.
(References)
[1]Zhou Naixin,Wang Si,Deng Zhenglong.Comparison of three transfer alignment methods in marine missile SINS[C]//Proceed of the 25th Chinese Control Conference.Harbin:[s.n.],2006:27-31
[2]Lu Hao,LiQunsheng,WangJinan.Research on transfer alignment for helicopter-borne air-to-air missile[C]//IEEE International Conference on Intelligent Computing and Intelligent Systems.Shanghai:[s.n.],2009:113-116
[3]Kain J E,Cloutier J R.Rapid transfer alignment for tactical weapon applications[R].AIAA-89-3581,1989
[4]Rogers R M.Velocity-plus-rate matching for improved tactical weaponrapid transferalignment[C]//AIAA Guidance,Navigation and Control Conference.New Orleans:[s.n.],1991:1580-1588
[5]Schneider A M.Kalman filter formulations for transfer alignment of strapdown inertial units[J].Journal of the Institute of Navigation,1983,30(1):72-89
[6]Spalding K.An efficient rapid transfer alignment filter[R].AIAA-92-4598,1992
[7]Tanant D,Roberts C,Jones D,et al.Rapid and robust transfer alignment[C]//IEEE Proceedings of Aerospace Control System.California,USA:IEEE Control Systems Society,1993:758-762
[8]Goshen-Meskin D,Bar-Itzhack I Y.Unified approach to inertial navigation system errormodeling[J].AIAA Journalof Guidance,Control and Dynamics,1992,15(3):648-653
[9]Jones D,Roberts C,Tanant D,et al.Transfer alignment design and evaluation environment[C]//IEEE Proceedings of Aerospace ControlSystems.California,USA:IEEE Control Systems Society,1993:753-757
New method for rapid transfer alignment
Han Yinghong Chen Wanchun
(School of Astronautics,Beijing University of Aeronautics and Astronautics,Beijing,100191,China)
To solve the transfer alignment problem on moving base of inertial navigation systems(INS),velocity plus attitude plus rate matching method was presented.Making use of three groups of parameters from both master and slave INS as the observations,Kalman filter was applied to estimate states such as the misalignment angle and the fixed installation error rapidly and exactly for the precise initialization of the slave INS.A statistic structural flexure movement model was introduced.According to the basic principle of transfer alignment,the state equation and the measurement equation were given in detail.Simulation results under the same conditions show that this scheme is as accurate as the velocity plus attitude matching and velocity plus rate matching.Besides,its evaluation time is only half of the other two’s.It can be used on airborne and seaborne tactical missiles to reduce the navigation bias and guidance error effectively.
inertialnavigation system;transferalignment;velocityplusattitudeplusrate;matching method
V 249.32+2
A
1001-5965(2012)02-0149-04
2010-10-08;< class="emphasis_bold">网络出版时间:
时间:2012-02-21 11:46;
CNKI:11-2625/V.20120221.1146.007
www.cnki.net/kcms/detail/11.2625.V.20120221.1146.007.html
韩英宏(1984-),男,河北唐山人,博士生,hanyinghongbuaa@yahoo.com.cn.
(编 辑:张 嵘)
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
学生天地(2020年3期)2020-08-25
专用汽车(2018年10期)2018-11-02
汽车观察(2018年9期)2018-10-23
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
探测与控制学报(2015年4期)2015-12-15
诗选刊(2015年4期)2015-10-26
弹箭与制导学报(2015年1期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12
