基于球投影的面阵探测器扭转角测量与校正
2012-06-22 05:43:52高海东魏东波
北京航空航天大学学报 2012年12期
高海东 杨 民 魏东波
孟凡勇
(北京航空航天大学 机械工程及自动化学院,北京100191)
(中国科学院过程工程研究所,北京100190)
近些年来,随着计算机技术的飞速发展和面阵探测器的出现,锥束X射线计算机断层成像(XCT,X-ray Computed Tomography)技术日益成为现代无损检测(NDT,Non-Destructive Testing)领域内的研究热点[1-3].锥束 XCT技术因其扫描效率高的优势得到了快速发展,并成功的应用到飞机涡轮叶片与火箭发动机等领域的无损检测.锥束XCT系统利用Radon正逆变换对进行重建成像[4],这就要求重建坐标系与扫描投影坐标系保持一致,吻合的程度直接影响重建CT图像的质量[5].但在实际系统中,探测器不可避免地存在安装误差,导致扫描投影坐标系偏离重建坐标系,影响着最终反投影地址的计算精度,造成重建图像出现伪影,丢失图像细节,影响检测结果.因此,对锥束XCT系统重建几何坐标系进行准确标定,是开展工业CT成像研究一项基础而又十分关键的工作.文献[5]提出了XCT系统的6个几何坐标配准参数,其中关于探测器的几何配准参数有:探测器绕中间行旋转角η、探测器绕中间列旋转角ξ及探测器绕中心射线的扭转角α,并针对上述3个配准参数进行了数值模拟实验,发现探测器的扭转角对重建图像的影响最大,产生了严重的伪影.本文针对探测器扭转角α,提出基于球投影椭圆轨迹的测量与校正方法,使重建坐标系达到Radon变换对的要求,消除重建伪影,保证重建CT图像的准确性.
1 探测器扭转角α测量
1.1 探测器位姿分析
FDK(Feldkamp)重建算法是目前锥束XCT成像技术的主流重建算法[6].FDK重建算法是在图1a中射线源和探测器构造的重建坐标系Oxyz中进行的,探测器的投影坐标系为xdOdzd,算法理论上要求两个坐标系的关系为:Odzd轴平行于Oz轴,Odxd轴平行于Ox轴.然而在实际的锥束XCT系统安装中,不可避免地存在机械安装误差,导致Odzd轴不平行于Oz轴,Odxd轴不平行于Ox轴,相当于坐标系xdOdzd绕y轴旋转了一定的角度,该角度为探测器的扭转角α,如图1b所示.扭转角α的存在将给重建断层图像带来伪影[7],造成断层图像发生形变,甚至导致特征信息丢失,影响图像的分辨力和细节的有效检出.
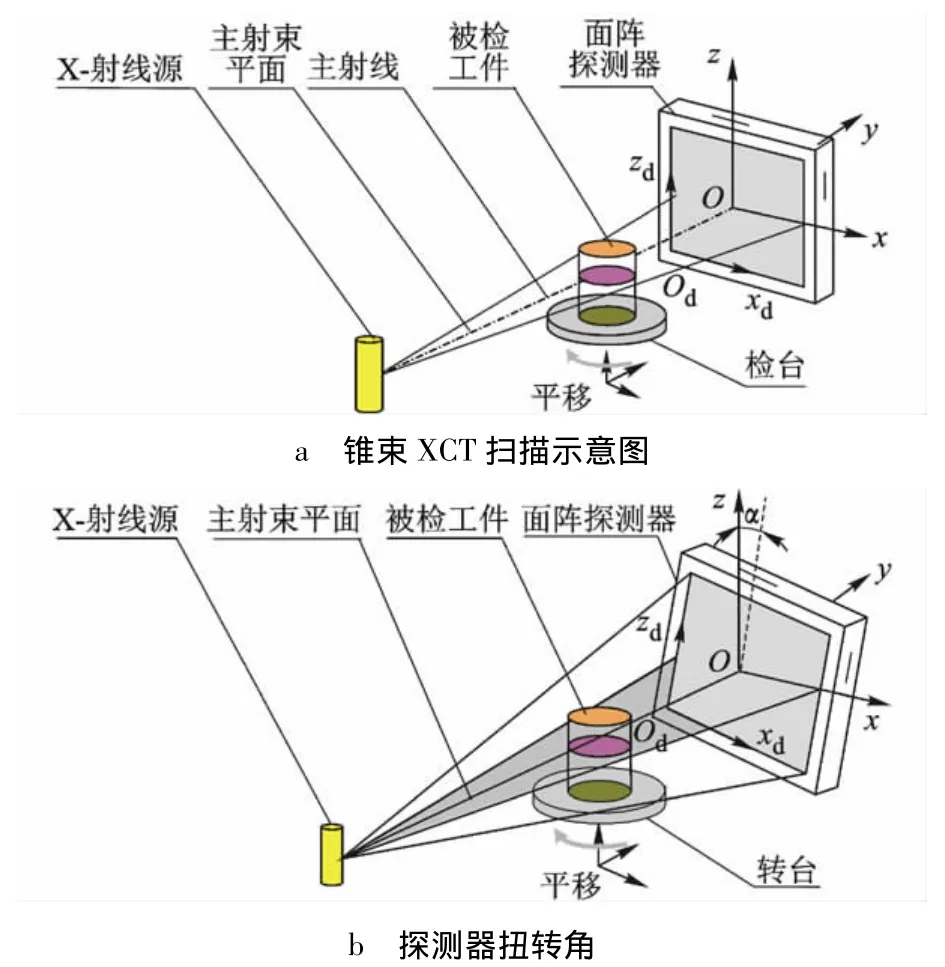
图1 投影与重建坐标系示意图
1.2 扭转角α测量方法
本文测量探测器扭转角α的方法原理如图2所示.xOz为理想状态下不存在安装误差的重建坐标系,xdOdzd为探测器存在安装误差扭转角α的探元坐标系,标志点P为非中心射束平面的空间一点,点P在转台的带动下绕转轴旋转.点P在探测器上的投影轨迹为曲线C,由检测系统的特性可知,曲线C呈现近似椭圆状.MN为该椭圆长轴所在的直线,直线l与探测器坐标系的Odxd轴平行,直线MN与直线l的夹角即为探测器的扭转角α.
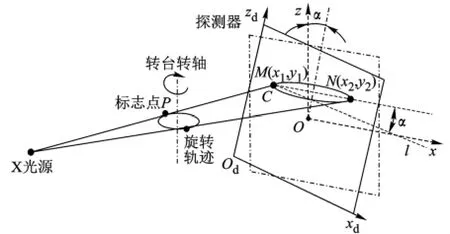
图2 探测器扭转角α测量原理图
令点 P 第 i帧投影坐标为 pi(xd-i,zd-i),采集点 P 的多帧投影得到点集 Q={pi(xd-i,zd-i)},对点集Q进行椭圆拟合求出探测器的扭转角α.常用的椭圆拟合方法主要有3类:基于最小二乘的拟 合 法[8]、基 于 不 变 矩 的 方 法[9]以 及 基 于HOUGH变换的椭圆拟合方法[10].基于最小二乘的椭圆拟合方法适用性强,是曲线拟合常用方法.本文拟选择基于对称性的最小二乘法拟合椭圆方程,进而求出长轴与坐标轴的夹角.椭圆存在2条正交对称轴,其边界上至少存在2个点其外法线方向相反,这2个点互为对偶点,对偶点具有平移、旋转、缩放不变性[11].基于椭圆的上述特性,对拟合点的采样进行优化,避免传统算法的大量无效采样,降低椭圆拟合的计算量.对点集Q,利用对偶点切线方向相同的性质选取对偶点,增大采样点落在同一个椭圆上的概率,得到采样点集Q',Q'满足 Q'⊆Q.
椭圆的一般方程为

令向量 β=[x2,xy,y2,x,y],则椭圆方程为

向量 θ=[a,b,c,d,e,f]决定了椭圆的形状参数,通过最小二乘拟合来寻找适合的参数向量θ,使各点到候选椭圆边缘的距离平方和最小.一般椭圆的5 个参数描述为:S={A,B,Xc,Yc,α}.其中A,B 表 示 半 轴 长,(Xc,Yc)表 示 中 心 坐标,α(-π/2<α<π/2)表示长轴与坐标轴正向的夹角.利用坐标的平移及旋转关系,得出 α与 θ=[a,b,c,d,e,f]的关系:

在上述思想的指导下,实验过程中可用钢珠在探测器成像平面xdOdzd上的投影质心代替标志点 P,第 i帧投影质心(xd-i,zd-i)的计算方法为
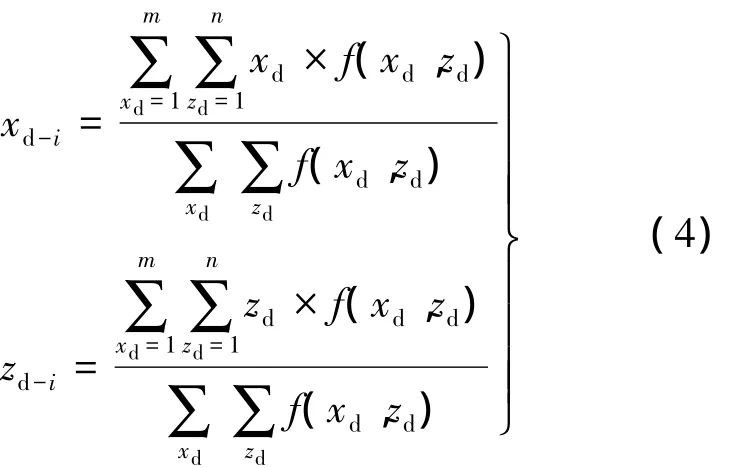
式中,m,n为投影图像尺寸;f(xd,zd)为坐标(xd,zd)处的投影值.综上所述,探测器位姿参数测算方法的流程为:采集多帧钢珠投影Q,利用式(4)求取每个钢珠投影的质心坐标(xd-i,zd-i),根据钢珠投影质心坐标采用基于对称性的最小二乘法进行椭圆拟合,得到椭圆参数向量θ,利用式(3)求得探测器的扭转角α.
2 校正方法
由于探测器的安装误差,导致探测器并非水平竖直,从而造成重建图像伪影,在这种情况下需要进行校正.如图3所示为引入探测器扭转角α锥束XCT重建坐标系统示意图.
锥束射线视为沿z轴方向不同倾斜角度的扇束射线堆积而成,中心平面sOt上的数据重构属于扇束FBP(Filtered Backprojection)精确重建,对于非中心平面的重建,通过对扇束FBP重建公式进行修正,得到FDK重建公式.设待重建衰减系数分布函数为f(s,t,z),视角 β下的投影值表示为 p(s,z,β).物体的衰减系数分布 f(s,t,z)可由锥束射线扫描FDK算法表示为


h(s)为斜坡卷积函数;pe(s,z,β)为等效投影:

令(s1,z1)为经过待重建点(s,t,z)的射线与探测器的交点,U为加权因子,由图3所示几何关系,引入探测器扭转角α,则有
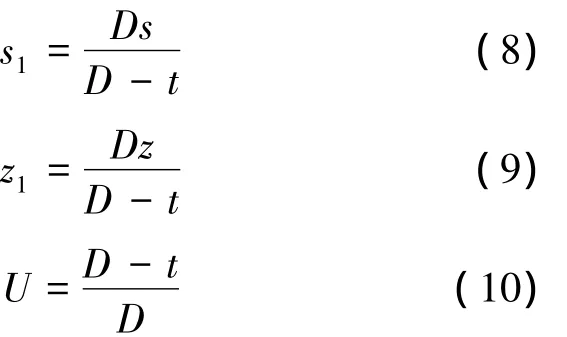
其中

当探测器扭转角α=0°时,式(8)~式(10)退化为原始方法计算的投影地址.
由于上述方法改善了投影地址的计算,使反投影过程更加准确,从而消除了探测器扭转角对重建图像的影响.
3 实验结果
3.1 探测器扭转角测量
实验条件:钢珠直径d=10 mm置于转台上,焦距D=1200 mm,转台距探测器200 mm,钢珠距转台中心d=75 mm,高度h=57 mm,探测器尺寸为1920×1536 像素,探元尺寸:0.127 mm/像素,采集投影180帧.采用1.2节方法测量扭转角,拟合得参数向量θ各元素:
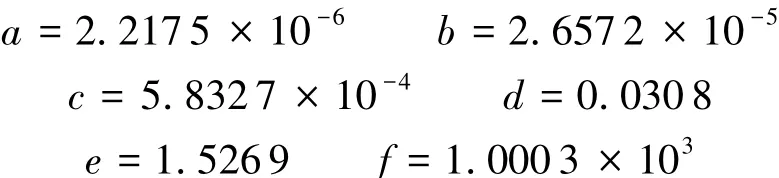
由式(3)可得长轴与 Odxd轴的夹角为:α=0.0227 rad,换算成角度为1.3006°,即扭转角 α=1.3006°.图4a所示为取对数后钢珠叠加投影.图4b所示为投影质心轨迹,虚线为椭圆长轴所在直线,实线与探测器的Odxd平行,放大部分示意椭圆长轴与探测器坐标轴的夹角α.
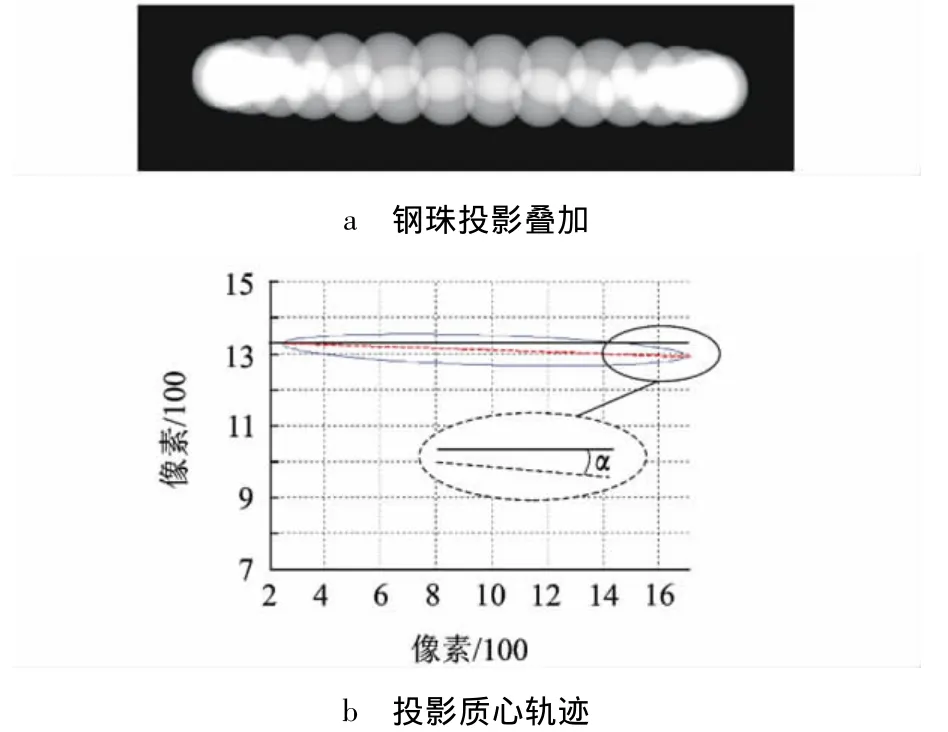
图4 探测器位姿参数测算结果
3.2 重建校正
利用上述得到的探测器扭转角,通过第2节改进的FDK重建算法进行校正.实验条件:射线源焦点尺寸0.2mm,管电压150kV,管电流2mA,焦距D=1200 mm,转台距探测器200 mm,探测器探元尺寸0.127 mm,被检对象为50 mm×50 mm×100 mm的Al,采集投影360幅.
图5a所示为利用原始FDK重建算法重建第30层得到的断层图像,图5b为在计入探测器扭转角之后利用本文方法校正得到的重建断层图像.改进算法对探测器的扭转角进行了有效校正,使得反投影地址得以精确计算,消除了由于探测器扭转角产生的伪影.对比图5a与图5b可以发现,由探测器扭转角引起的图像边缘模糊得到了很好的校正,断层图像的直角特征得到了保留.
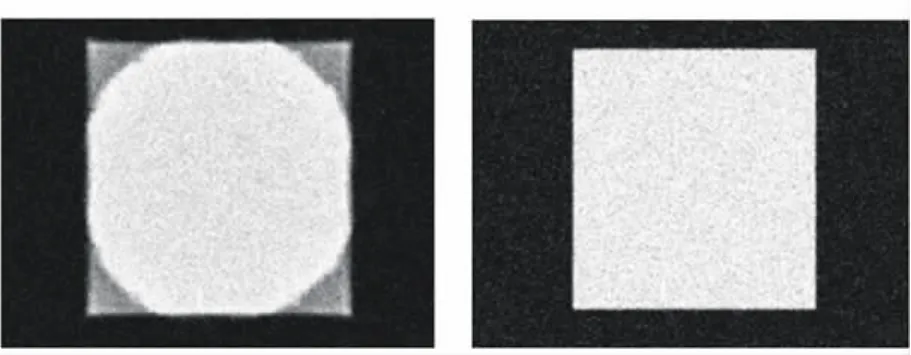
图5 校正前后重建断层图像对比
4 结束语
本文讨论了锥束XCT扫描系统中投影坐标系与重建坐标系的配准问题,针对探测器的安装误差,提出了基于球投影的探测器扭转角的测量方法,并在三维锥束FDK重建算法的基础上,结合空间坐标变换原理,推导了相应的校正方法.校正结果表明了扭转角测量结果及重建断层图像的准确性.本文方法在实现过程中,为保证测量和校正精度,需要多帧标志点的投影,另外探测器安装误差的扭转角的旋转中心也需要正确标定,否则会导致校正效果不佳甚至重建图像错误.
References)
[1]Roberts J A,Drage N A,Davies J.Effective dose from cone beam CT examinations in dentistry[J].British Journal of Radiology,2009,82(973):35-40
[2]Yan Guorui,Tian Jie,Zhu Shouping,et al.Fast cone-beam CT image reconstruction using GPU hardware[J].Journal of X-Ray Science and Technology,2008,16:225-234
[3]Periago D R,Scarfe W C,Moshiri M,et al.Linear accuracy and reliability of cone beam CT derived 3-dimensional images constructed using an orthodontic volumetric rendering program[J].Angle Orthodontist,2008,78(3):387-395
[4]Jiang Hsieh.计算机断层成像技术原理、设计、伪像和进展[M].北京:科学出版社,2006:27-65
Jiang Hsieh.Computed tomography principle,design,artifacts and recent advance[M].Beijing:Science Press,2006:27-65(in Chinese)
[5]侯颖.锥束XCT的定标方法研究[D].大连:大连理工大学信息与通信工程学院,2010:28-42
Hou Ying.Research on calibration method in cone-beam XCT[D].Dalian:School of Information and Communication Engineering,Dalian University of Technology,2010:28-42(in Chinese)
[6]Miao Hui,Wang Tingting,Zhao Huijuan,et al.Improvement based on FDK reconstruction algorithm of conebeam CT[C]//Proc of SPIE.Belingham:SPIE,2010,7570:1-7
[7]戎军艳.锥束微CT系统伪影校正与性能测试[D].北京:中国科学院高能物理研究所,2009:62-64
Rong Junyan.Artifacts correction and performance tests of cone beam micro-CT system[D].Beijing:Institute of High Energy Physics,Chinese Academy of Science,2009:62-64(in Chinese)
[8]邹益民,汪渤.一种基于最小二乘的不完整椭圆拟合算法[J].仪器仪表学报,2006,27(7):808-812
Zou Yimin,Wang Bo.Fragmental ellipse fitting based on least square algorithm[J].Chinese Journal of Scientific Instrument,2006,27(7):808-812(in Chinese)
[9]Mehmet Ali Aktas.Measuering shape ellipticity[J].Computer A-nalysis of Image and Patterns,2011,6854:170-177
[10]Hu Xinyu,Chen Zuobing,Zhang Daode,The application of randomized hough transform in ellipse image detection[J].Advanced Material Research,2010,159:388-392
[11]吕洪赫,姚振杰,易卫东.基于对称性的最小二乘拟合随机椭圆检测法[J].电子测量技术,2011,34(5):37-41
Lü Honghe,Yao Zhenjie,Yi Weidong.Random least square fitting elliptic detection algorithm based on symmetry[J].Electronic Measurement Technology,2011,34(5):37-41(in Chinese)
猜你喜欢
数学杂志(2022年5期)2022-12-02 08:32:10
机床与液压(2022年10期)2022-09-20 01:57:46
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26 07:43:38
中学数学杂志(2019年1期)2019-04-03 00:35:42
中国医疗器械信息(2019年3期)2019-03-09 02:51:58
中国医学影像学杂志(2018年9期)2018-10-17 01:27:18
发明与创新·小学生(2018年1期)2018-02-02 08:54:26
发明与创新(2018年3期)2018-01-24 02:52:23
福建中学数学(2016年4期)2016-10-19 05:09:02
中国卫生标准管理(2015年4期)2016-01-14 05:16:44