
基于动态碰撞时间预测的机器人区域射门算法
2012-06-13 02:09:16张秋实张天航张雨泽黄冰冰
东北电力大学学报 2012年4期
张秋实,张天航,张雨泽,吴 阳,黄冰冰
(东北电力大学信息工程学院,吉林吉林132012)
机器人足球融合了实时视觉系统、机器人控制、无线通讯、多机器人控制等多个领域的技术[1],已成为研究多智能体系统的一个标准实验平台[2,3]。机器人足球赛是在一个实时、动态的环境中进行的[4],射门成功率无疑是决定一支球队实力的关键因素,引起越来越多学者的重视[5]。
提高射门成功率的方法有很多,最受学者们关注的是人工智能算法和曲线拟合算法。由于仿真机器人足球比赛平台时间响应快,实时性要求高,人工智能算法的特点和优势无法充分体现。所以,各参赛队多使用曲线拟合算法规划射门路径。文献[6-12]构造了不同的拟合曲线,在射门曲线的速度性、准确性、连惯性以及避障和死角射门等方面进行了深入研究,一定程度上提高了机器人一次射门成功率。
随着团队防守层次的不断优化和守门员防守质量的不断提高,一次射门效率受到了很大的限制。为此本文提出一种基于动态碰撞时间预测的区域射门算法,在保证一次射门成功率的前提下,尝试着提高二次射门成功率,进而提高射门效率。该算法在运动中预测机器人与球碰撞发生的时间、碰撞区域以及对方守门员站位趋势,根据对方守门员的站位趋势来设计死角射门动作。仿真实验结果表明,用此方法改进射门动作后,射门的成功率和比赛的进球数明显提高。

图1 射门区域
1 射门条件判断
比赛中,机器人和球的位姿时刻在变化,只有满足特定关系时才具备射门条件。本文将射门机器人和球的运动方向、碰撞位置和预测碰撞时间作为约束,判断是否具备射门条件。
(1)运动方向约束:机器人运动方向与球运动方向必须有交点,且交点在球场之内。
(2)碰撞位置约束:球经过s个周期运动后必须达到射门区域(如图1阴影区域)。(3)预测时间约束:保证机器人和球经过s个周期后相碰撞。
如果同时满足上述三个约束条件,就认定该机器人满足射门条件。
2 射门算法
2.1 基本思想
比赛中满足射门条件的态势主要分为三种情况:
情况1:机器人运动方向与球运动方向交点位于射门区域内,如图2(a)。
这是最简单的一种态势,只需实时预测小球运动到G点所用的时间——碰撞周期。通过碰撞周期控制机器人直线运动的速度,保证在最短时间内用最高速度撞击小球,完成射门。
情况2:机器人运动方向与球运动方向交点位于射门区域上侧,如图2(b)。
当交点G位于射门区域上侧时,本文将小球运动方向与射门区域上边界交点G'点视为机器人与小球的碰撞点。机器人通过曲线运动调整运动方向和运动速度,使其运动方向对准G_Top点(死角),此时碰撞点G点与G'点重合。接下来直线射门同情况1。
情况3:机器人运动方向与球运动方向交点位于射门区域下侧,如图2(c)。
当交点G位于射门区域下侧时,将小球运动方向与射门区域下边界交点视为机器人与小球的碰撞点。射门曲线同情况2。
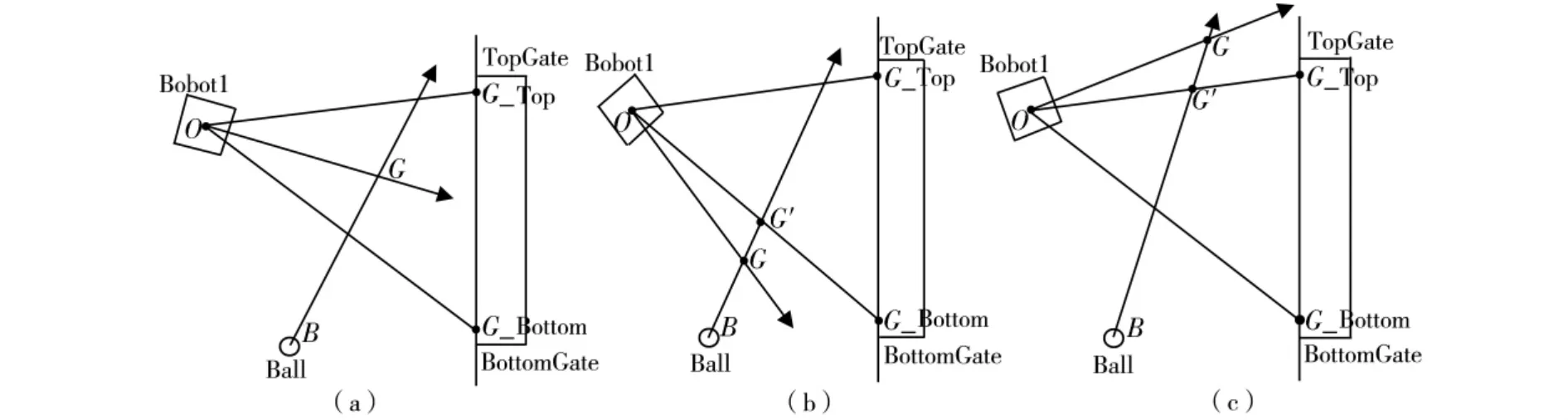
图2 射门态势
2.2 射门算法优化
假设碰撞点在大禁内或大禁区前沿,如果预测对方守门运动趋势为快速封堵G_Top点或G_bottom点,主攻机器人强行射门不但不能得分还容易造成犯规(门区内进攻方机器人碰到守门员和门区内进攻机器人数大于1个均视为犯规),使球权易主。为了确保射门效率,本文将射门动作进行了优化,即实施远门柱射门策略。在机器人与小球碰撞瞬间,用原地高速旋转碰撞代替高速直线碰撞,将小球射向远门柱(如图3)。即使推射远角效果不理想,球被守门员扑出,小球的反弹大致方向如图4。此时,助攻机器人满足射门条件,可用本文算法实施二次射门。远门柱射门策略不仅可以增加进球几率,其战略意义更大。一是可有效避免冲撞守门员犯规,二是将主攻机器人控制在门区外,给助攻机器人补射创造条件。
如果碰撞点G离大禁区较远,射门路径中有对方机器人拦截,可利用本文射门算法进行传接球策略设计。
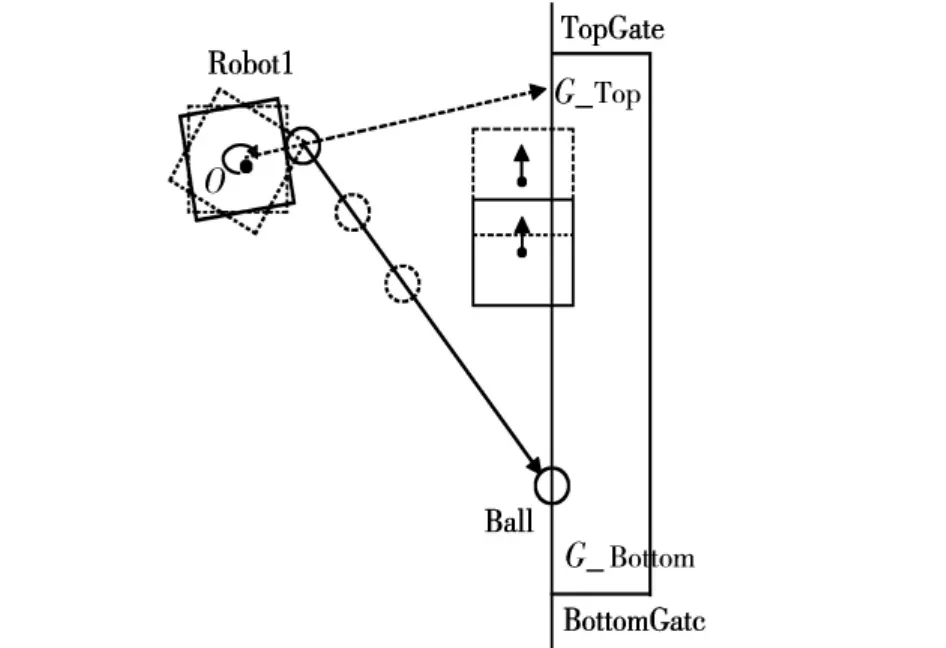
图3 推射远角

图4 二次射门

图5 机器人运动学模型
2.3 动态路径规划
机器人的射门路径规划可分解为机器人先作曲线运动(VR≠VL)消除角度偏差,当运动方向指向G_Top点(下边为G_Bottom点)时再做直线运动(VR=VL)射门。消除角度偏差可通过改变机器人的左右轮速来实现。轮式机器人运动学模型如图5所示。
机器转向半径:

碰撞时间:

机器人速度:

机器人转向角速度:

由公式(1)(2)(3)(4)可解得:

式中:Vball是小球速度,L是机器人边长,Δθ是机器运动方向与期望射门方向的夹角,Dis_B_G是小球与G'点的距离,Dis_R_G是机器人与G点的距离。
公式(5)、(6)主要用来消除角度偏差,可看出,当角度偏差Δθ=0时,VR=VL。
3 实验验证
仿真试验使用FIRA SimuroSot 5Vs5标准仿真比赛平台,如图6所示。针对快速、动态的比赛过程,用VC++编写算法,进行射门仿真试验。蓝方为防守方,0号机器人为守门员,1号机器人为专职防守队员。黄方为进攻方,0号机器人为守门员,1、2号机器人中优先级高的机器人负责射门,优先级低的机器人跑位,准备补射。进攻方分别使用本文算法、Bézier曲线、切入圆轨迹、动态基准圆算法进行射门,每种算法射门试验500次,试验结果如表1所示。
图6 PIRA SimuroSot 5Vs5仿真比较平台
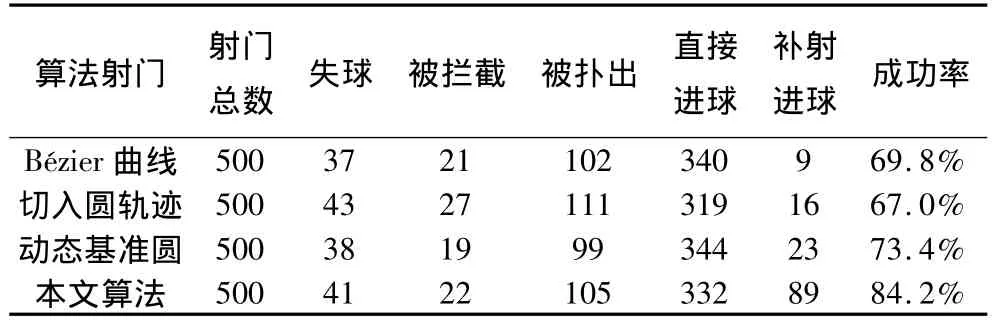
表1 实验结果
从表1中不难看出,本文射门算法与几种经典曲线拟合算法相比,一次射门成功率相差不大,但二次射门成功率明显提高。且对方守门员防守质量越高,本算法的优势越大。
4 结 论
本文射门算法充分考虑了机器人的当前状态,并能保证到达目标点的速度和方向。当机器人运动角度与期望射门角度一致时,机器人最后击球完成射门。射门曲线简单,路程短,与直线射门路径过渡平滑,能满足准确性、速度性和连惯性的要求。仿真实验表明,该算法大大提高球队动态环境下的进球效率。此外,该算法还可用作拦截球和多机器人传接配合。
[1]Kim J H,Kim H S,Jung M J,et al.A cooperative multi-agent system and its real time application to robot soccer[A].Proc of IEEE Conf on Robotics and Automation[C].New Mexico:Albuquerque,1997:638 -643.
[2]Kim J H.Third call for participation micro-robot world cup soccer tournament 1996(MiroSot’96)[EB/OL].http://vivald.i kaist.ac.kr.
[3]Asada M,Kitano H.The RoboCup challenge[J].Robotics and Autonomous System,1999,29(1):3 - 12.
[4]Stone P.Layered learning in multi-agent systems[D].Pittsburgh:Carnegie Mellon University,1998.
[5]Harvey J,Cheng C.High-level design of a MIROSOT simulator[A].Proc of the Micro-Robot World Soccer Tournament[C].Taejon:KAIST,1996:87-89.
[6]刘宏志.一种改进的射门算法[J].哈尔滨工业大学学报,2004,36(7):975-977.
[7]臧军旗,赵臣,崔炜,等.基于区域和切圆弧的足球机器人射门动作研究[J].哈尔滨工业大学学报,2005,37(7):950-952.
[8]郭路生,杨林权,吕维先.基于Bézier曲线的机器人足球射门算法[J].哈尔滨工业大学学报,2005,37(7):921-923.
[9]王月海,董天祯,洪炳镕.基于动态基准圆的机器人足球射门算法研究[J].哈尔滨工业大学学报,2005,37(7):953-955.
[10]柳在鑫,王进戈,朱维兵.足球机器人的双圆弧射门算法研究[J].西安交通大学学报,2007,41(11):1326-1329.
[11]柳在鑫,王进戈,王强,朱维兵,张均富.利用渐开线的足球机器人射门算法研究[J].西安交通大学学报,2009,43(1):96-98.
[12]宋大雷,孟宪强,宋朝晖,申文卿.基于动态椭圆曲线的足球机器人射门路径规划算法[J].计算机应用,2009,29(6):1544-1546.
猜你喜欢
数学小灵通(1-2年级)(2023年8期)2023-08-24 06:05:00
少年博览·小学低年级(2023年4期)2023-05-30 10:48:04
考试与评价·高二版(2021年1期)2021-09-10 14:44:53
冰雪运动(2020年4期)2021-01-14 00:56:02
体育风尚(2019年1期)2019-09-10 07:22:44
学生导报·东方少年(2019年7期)2019-06-11 11:03:18
数学学习与研究(2017年11期)2017-06-20 00:02:38
传媒评论(2017年12期)2017-03-01 07:05:08
青年时代(2017年3期)2017-02-17 01:40:47
小雪花·小学生快乐作文(2016年4期)2016-05-14 10:13:19
