
基于多维测力台的有限元分析研究
2012-06-09 10:15彭雪艳毛志勇
电子设计工程 2012年2期
彭雪艳,蔡 萍,武 博,毛志勇
(上海交通大学 仪器科学与工程系,上海 200240)
目前,多维力传感器在许多领域得到发展和应用,例如各种多维测力传感器、智能笔在书写或空中动作时的受力情况等方面。多维力传感器在最近几十年内得到了快速发展,产生了几种典型的结构。根据国内外现有资料,从力向量的6个独立分量的获取方式分类,可大致将传感器弹性体结构分为两大类,即直接输出型(无耦合型)和间接输出型(耦合型)。直接输出型传感器输出力向量的6个分量直接由应变电桥或根据结构常数通过简单的计算获取,设计原理是在力学分析的基础上设计出无耦合作用的弹性体,其典型代表时候由美国IBM公司1975年设计的一种积木式结构;间接输出型有两种典型结构,一种是竖梁结构,另一种是横梁结构。还有一些比较复杂的结构,可视为这两种结构的改进和组合。典型的竖梁结构是由美国Draper实验室研制的Waston腕力传感器[7],由3根树立的应变梁和上下两个轮缘构成,横向结构的典型代表是斯坦福大学人工智能研究所设计的Scheinman十字梁结构[3-4]。上述3种传感器,或由于弹性体本身的结构问题导致横向效应好、而轴向效应差;或由于耦合作用导致传感器输出数据处理比较复杂,标定矩阵为近似解。应变式传感器是多维力传感器开发的主流。因为应变测量既能测静态载荷,又能测动态载荷;同时利用电桥的运算特性,可有效地消除维间耦合干扰。因此,文中以多维测力台为研究对象,充分运用电桥的运算特性,利用有限元方法对设计的六维力传感器弹性体各部分受力情况进行分析,确定应变片粘贴部位及方向,使弹性体元件结构在进行六维力测量时具有匹配的灵敏度。
1 多维测力台及传感器弹性体的结构设计
多维测力台采由传感器、顶板和底板组成[1],多维传感器由上受力体、弹性体和下受力体组成,如图1所示。
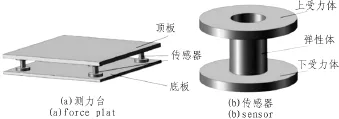
图1 多维测力台结构图Fig.1 Structure of multi-dimensional force plat
传感器的弹性体亦称弹性元件,是应变式多维力传感器的核心部分。工作时它受到被测物体多维力的作用而发生弹性变形,通过贴在相应敏感区的应变片测出敏感区的应变大小,建立起六维力信号和应变之间的确定关系,再通过精确的标定获得的多维力输入信号与传感器输出电信号的数量对应关系,最后得到被测物体多维力信息。所以弹性体结构设计的优劣对传感器性能好坏至关重要。传统弹性体结构复杂,加工精度低,文中采用了薄壁圆筒型弹性体。目前多数的弹性体都采用厚度不均匀的薄壁圆筒结构,以此增加薄壁圆筒上敏感区区域的应变,但是加工精度较难保证。我们的设计采用的是均匀壁厚的薄壁圆筒,均匀壁厚的薄壁圆筒具有结构简单、易于加工、加工精度容易保证等优点。测力台采用底面上4只对称位置放置的弹性体组成的多维力测力台,通过4只弹性体上的应变片联合组桥,每一维力的测量桥路中都有4个弹性体上的应变片,每一个应变电桥的桥臂上的应变片都多于一片,这样既增加了每一维力/力矩的灵敏度,也增加了电桥的输出信号。在薄壁圆筒的中心层区域相差45°角的区域为应变敏感区,薄壁圆筒共有8个敏感区,分别用来测量多维力。
2 多维测力传感器原理及组桥
2.1 多维力传感器原理
应变式传感器具有良好的线性、分辨力高、刚度大、测量范围大、可以补偿由于温度变化造成的误差和尺寸小等特点。为了克服传统弹性体结构复杂、加工精度滴的问题,本文设计了薄壁圆筒型弹性体。圆筒型弹性体具有结构简单、易于加工、加工精度容易保证等优点。因此本多维力测力台采用应变式薄壁圆筒型传感器。测力台和传感器的结构如图1所示。
多维力传感器将受到的多维力转换为应变区上的应变,在弹性范围内,应变与电桥输出电压成正比,桥路的输出电压与多维力成正比[8],满足以下关系:
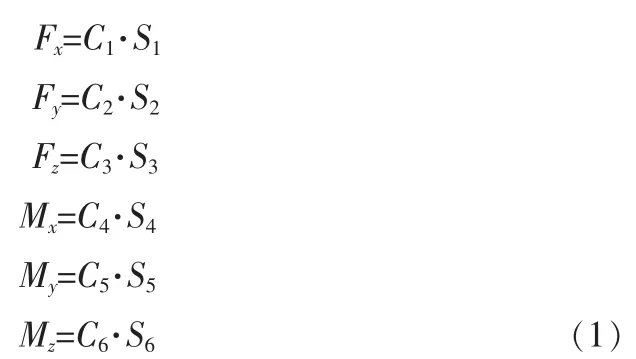
式中:Si(i=1,2,…6)——桥路输出电压
Ci(i=1,2,…6)——标定系数
2.2 弹性体贴片位置确定及组桥方式
力传感的灵敏度对输出的影响等指标,既取决与结构本身是否合理,也取决于正确地选择贴片位置及组桥。由上面应力分析的结果,综合考虑力、力矩间的干扰,确定贴片位置和电桥组桥方法。文中设计的多维传感器测力台的输出是通过测力台底板和顶板中间对称分布的4只传感器共同组桥。弹性体上应变片分布如图2所示。
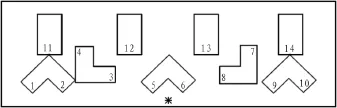
图2 弹性体上应变片分布Fig.2 Strain gauge distribution on elastic body
下面介绍Fx的桥路,并说明如何消除串扰。测力台在受Fx方向的力变形如图3所示。从图中可以看出弹性体的左侧产生压应变,右外侧产生拉应变。测量Fx的应变片分布如图4所示。在受到多维力的时候各个应变片的应变变化如下表1,可以看到在惠斯通桥路中只有Fx产生的应变有输出,而对于其他方向的力/力矩产生的应变在桥路中的输出都是零。这样,通过差动的组桥有效的消除了维间的干扰。测量Fx的电桥如图5所示。
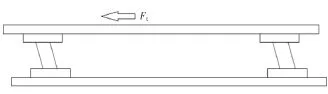
图3 测力台在Fx作用下的变形情况Fig.3 Deformation of force plat under force Fx
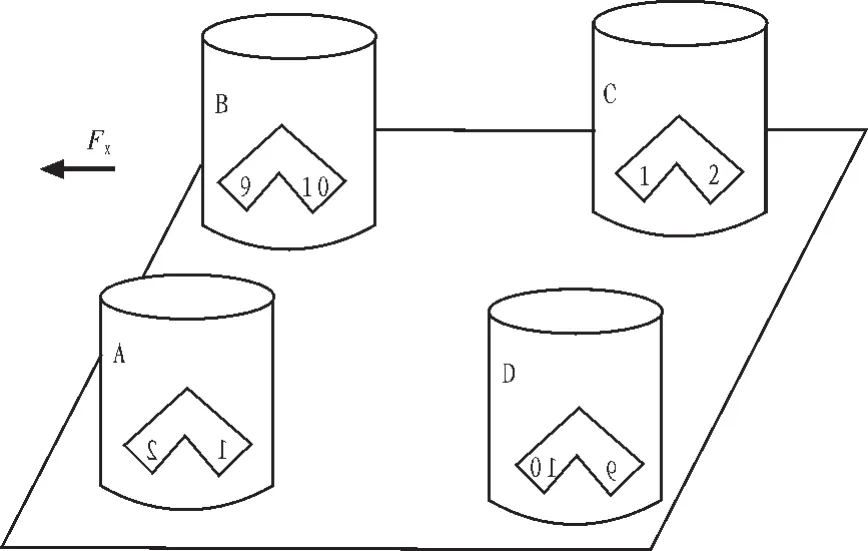
图4 传感器上测量力Fx的应变片分布Fig.4 Gauge distribution on the sensor for force Fx
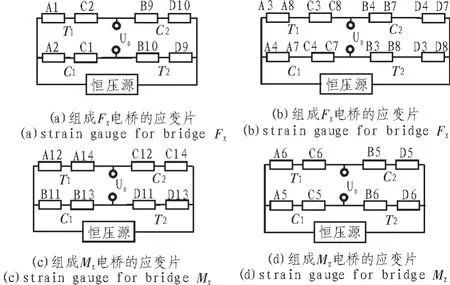
图5 测量桥路Fig.5 Measurement bridge
通过上边的分析,测量电桥在受多维力的应变变化情况如表1~4所列,可以看到按照理论分析,完全消除了维间耦合。下面用有限元方法进行验证。
3 多维力传感器测力台的有限元分析
通过有限元软件Abaques进行有限元应力分析,对于多维力传感器来说,需要在弹性体上粘贴多个应变片以实现机械应变的电检测[2]。由于弹性体空间的限制,小型曲面力传感器中粘贴应变片的难度很大,并且应变片的粘贴位置和方向难以精确控制,这些因素将直接影响到多维力传感器的测量精度。因此对于精确的确定弹性体的敏感区,以及合理的组桥是提高传感器测量精度有效方法。对弹性体模型分别施加轴向和侧向的力和力矩,得出在多维力、力矩作用下主应力的分布状况和模型变形情况。
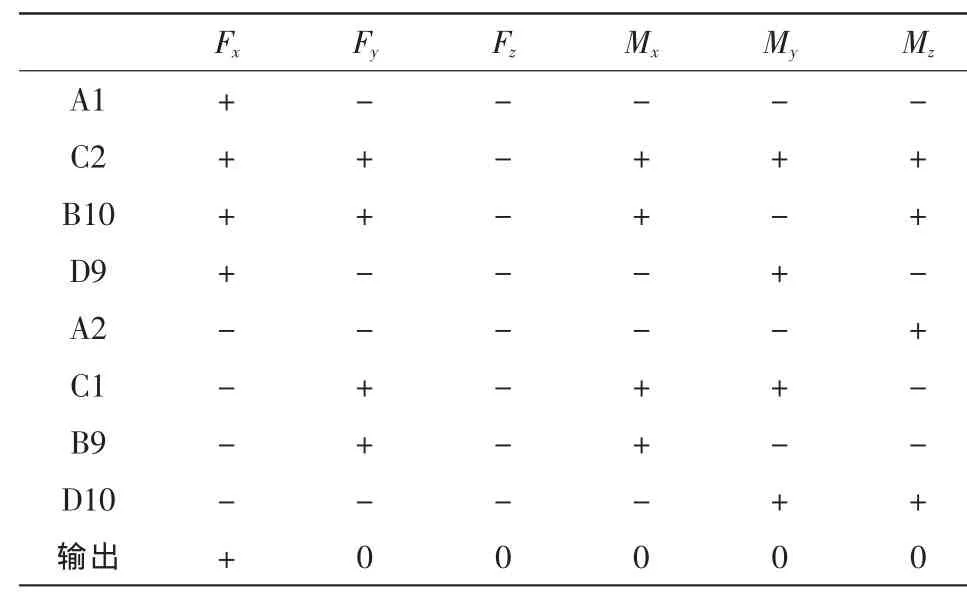
表1 测量Fx电桥应变片在多维力作用下的应变情况Tab.1 Fx wheatstone bridge gauge output changes undereach applied foce/torque
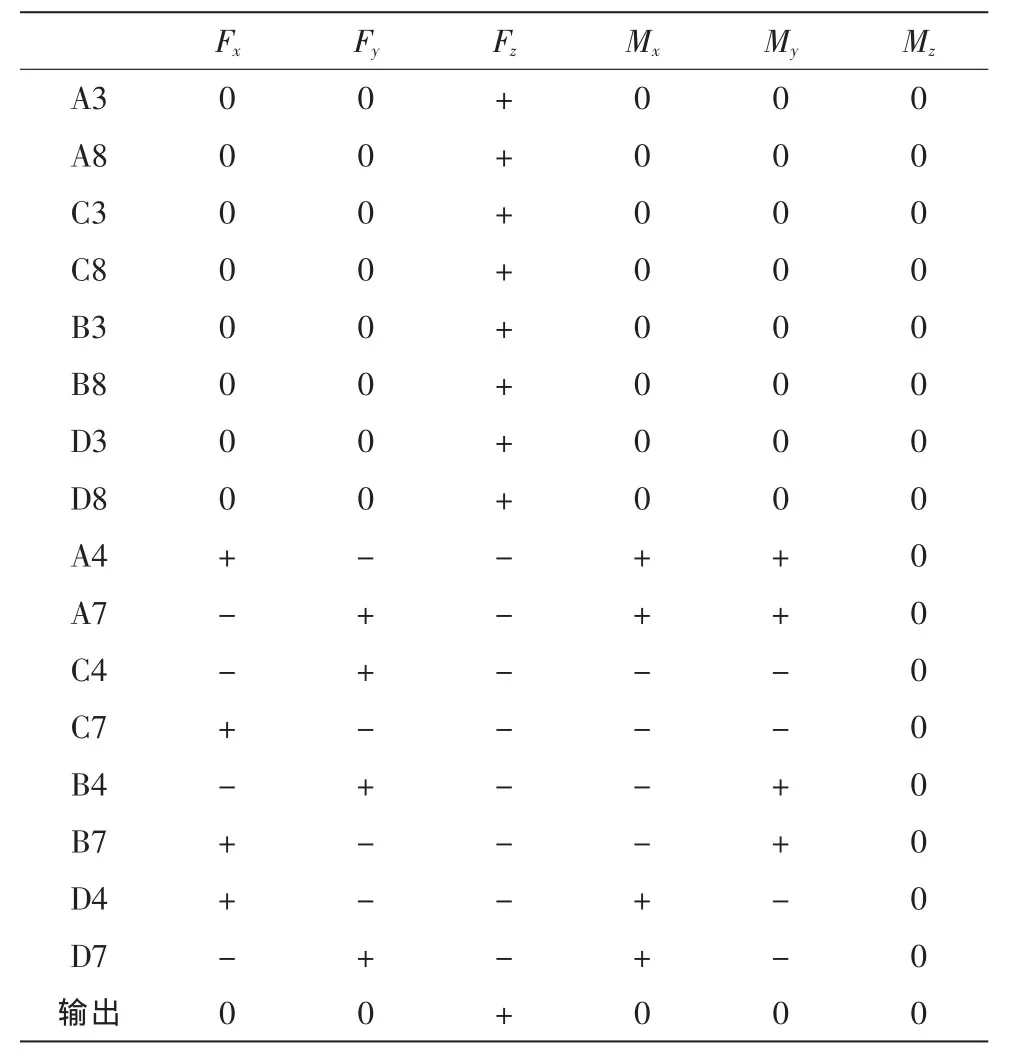
表2 测量Fz电桥应变片在多维力作用下的应变情况Tab.2 Fz wheatstone bridge gauge output changes under each applied foce/torque
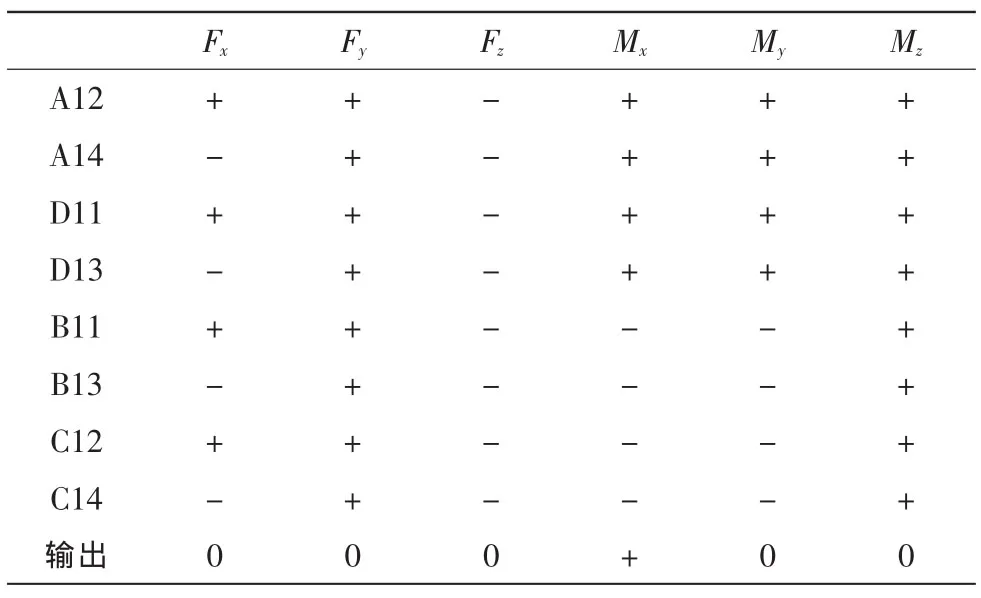
表3 测量Mx电桥应变片在多维力作用下的应变情况Tab.3 Mx wheatstone bridge gauge output changes under each app lied foce/torque
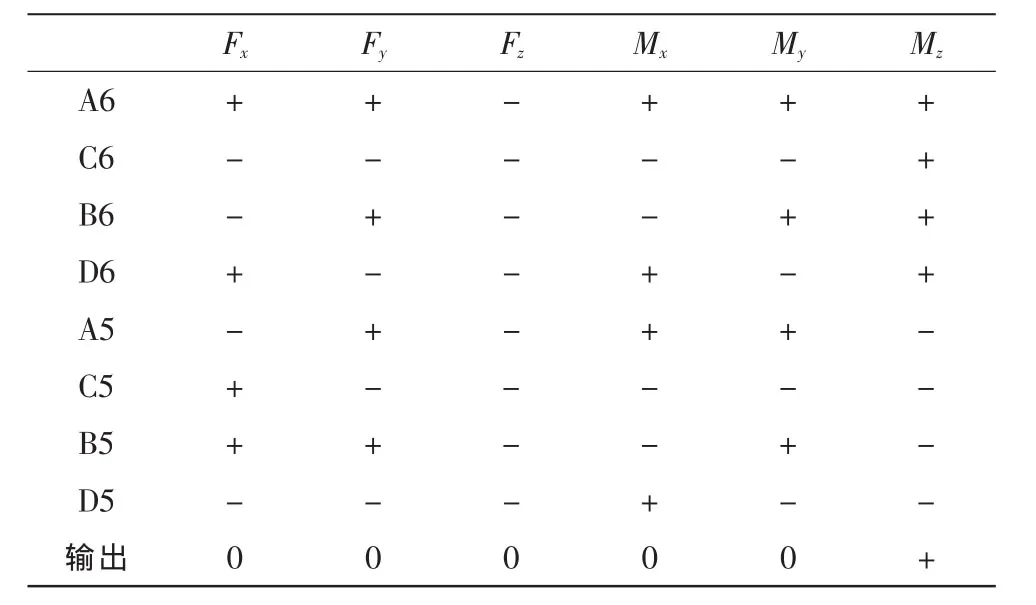
表4 测量Fx电桥应变片在多维力作用下的应变情况Tab.4 Fx wheatstone bridge gauge output changes under each applied foce/torque
3.1 单元划分即边界条件确定
多维测力台材料选为合金钢,材料特性:弹性模量E=2.1×1011N/M2,泊松比 μ=0.3,密度 ρ=7 800 kg/m3,屈服极限。模型由上下两部分受力体及中间弹性体组成,受力体分别与上下面板螺钉连接,刚度很高,可忽略变形。弹性体是薄壁圆筒型结构,测力台上四个传感器是完全对称放置。测力台模型的3个转动自由度是完全被约束的,只有3个平移自由度。传感器的下受力体固定在底板上,上受力体承受和传递多维力、力矩,所以在确定边界条件的时候,底板的3个自由度全部被约束。顶板的自由度约束分两种情况:当加载力载荷的时候,顶板用三维固体元表示,无自由度约束;当加载力矩载荷的时候,顶板用板元表示,也无自由度的约束,这是因为三维固体元无转动自由度,不能向下传递力矩的缘故。弹性体网络展开图如图7所示,计算时,分别在模型的顶面沿轴向(Z向)和侧向(X、Y向)(X向与Y向相互对称,故只需计算一个侧面即可)施加力和力矩[5]。划分单元格的测力台如图6所示。
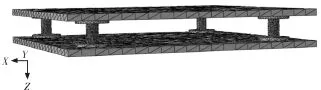
图6 测力台有限元网格图Fig.6 Meshes of force plat finite element analysis

图7 弹性体展开图Fig.7 Elastic body expansion plan
3.2 载荷计算结果分析
通过有限元分析和经验公式计算得到:模型受侧向力时,图 7 中单元 1、2、9、10 为敏感区;受轴向力时,单元 3、4、7、8 为敏感区;受侧向力矩时,单元 11、12、13、14 为敏感区;受轴向力矩时,单元5、6为敏感区。
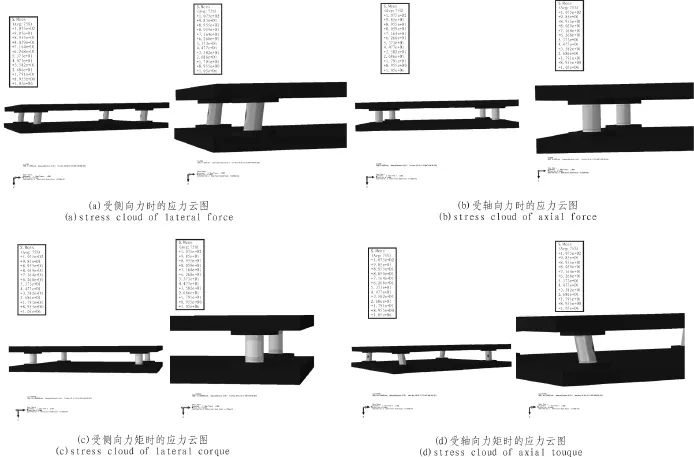
图8 多维测力台的应力云图Fig.8 Stress cloud of multi-dimensional force plat
测量电桥的应变情况如表5~8所示。
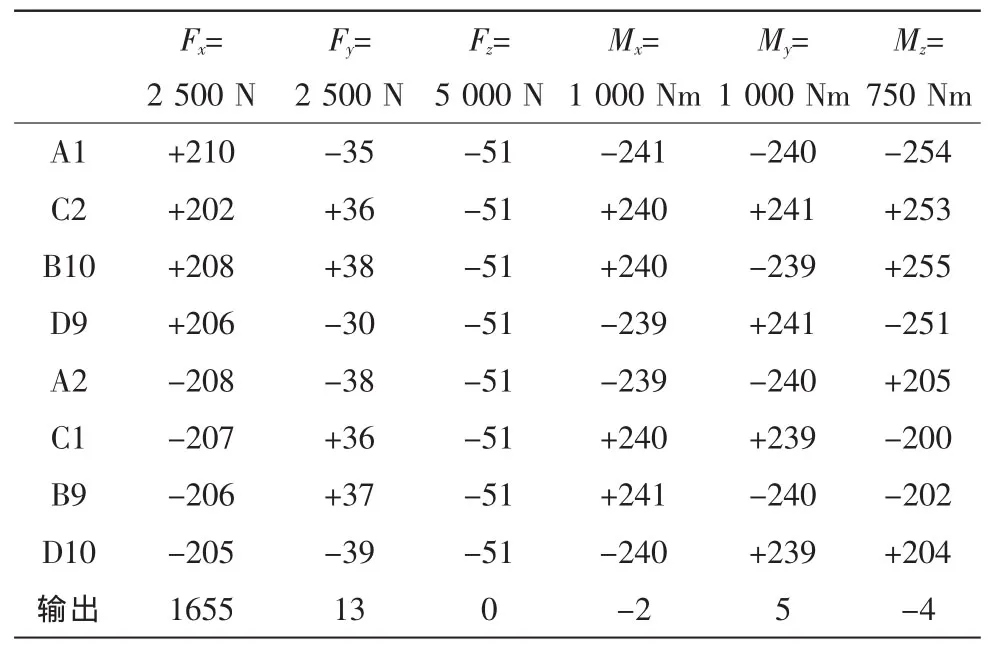
表5 测量Fx电桥的应变片对每一维力的应变(微应变)Tab.5 Strain of bridge Fx outputs under each single force/torque
如表5~8所示,以上多维力传感器的有限元分析结果,精确定位应力最大的区域,确定了弹性体上的贴片位置,验证了理论分析传感器布片的合理性。分析结果表明多维测力台4个传感器联合组桥有效消除了维间耦合。
4 结束语
根据以上的分析与实验,可以看出文中涉及的多维力传感器测力台结构简单,分布式对称结构,制造工艺性好,灵敏度高。在设计过程中利用有限元法对传感器弹性体模型进行优化分析和设计,可以大大缩短传感器的设计周期,并为改进结构和确定正确的贴片位置提供可靠依据,有效消除维间耦合。
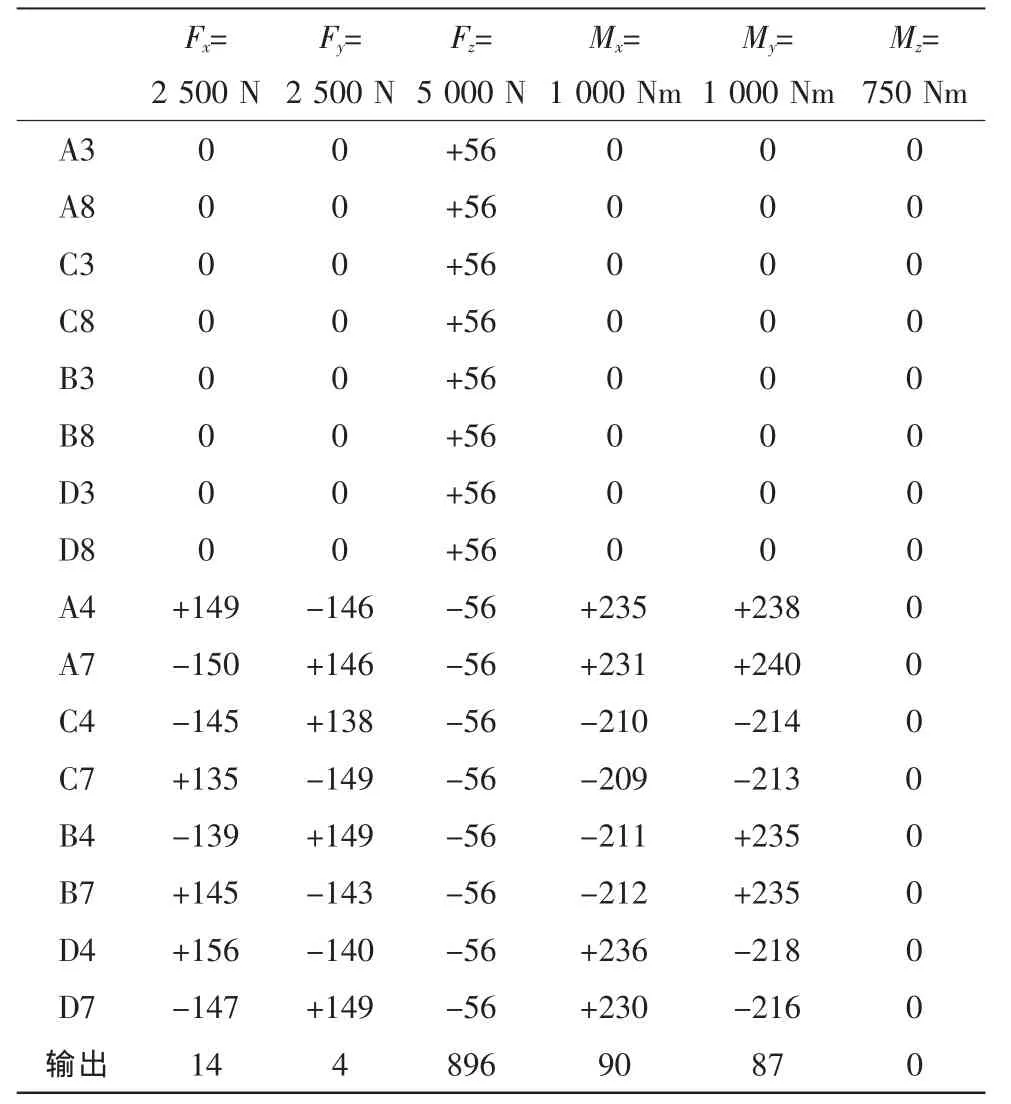
表6 测量Fz电桥的应变片对每一维力的应变(微应变)Tab.6 Strain of bridge Fz outputs under each single force/torque
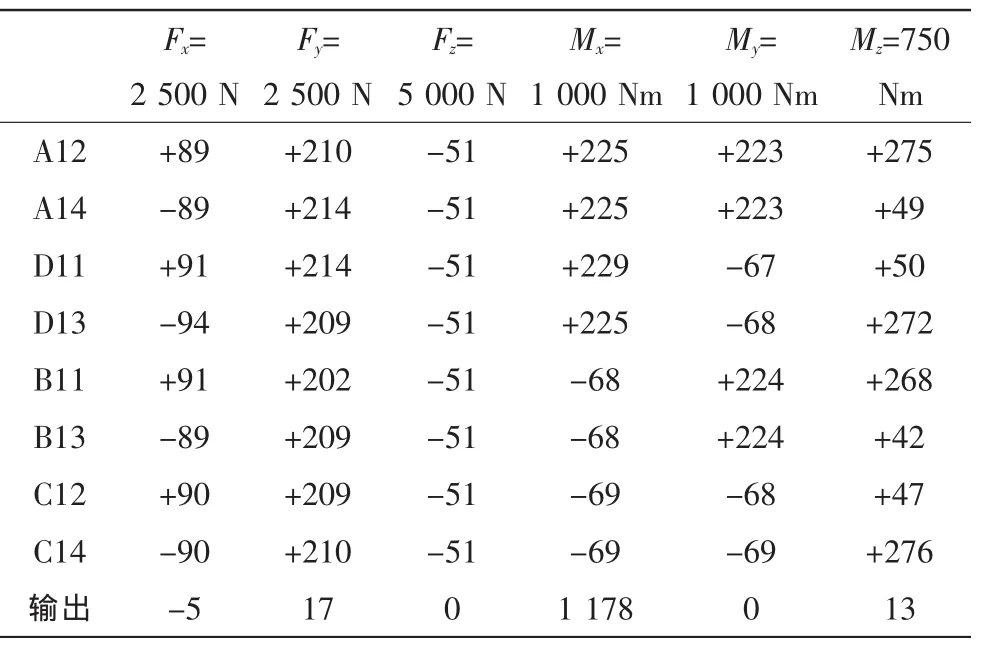
表7 测量Mx电桥的应变片对每一维力的应变(微应变)Tab.7 Strain of bridge Mx outputs under each single force/torque

表8 测量M z电桥的应变片对每一维力的应变(微应变)Tab.8 Strain of bridge Mz outputs under each single force/torque
[1]龚邦明,程良麒,周汝忠.测力平台工作台结构优化[J].西南交通大学学报,1994(5):519-524.GONG Bang-ming, CHENG Liang-qu, ZHOU Ru-zhong.Structure optimized of force platform[J].Journal of Southwest Jiaotong University,1994(5):519-524.
[2]罗学科,刘玉常.薄壁圆筒式动态多功能切削仪的有限元分析[J].仪表技术与传感器,2000(4):37-40.LUO Xue-ke,LIU Yu-chang.Dynamic finite element analysis of multi-function thin-walled cylinder cutting instrument[J].Instrument Technique and Sensor,2000(4):37-40.
[3]金振林,张晓辉,高峰.Stewart型指尖力传感器结构尺寸对其灵敏度的影响研究[J].计量学报,2004,25(3):262-265.JIN Zhen-lin, ZHANG Xiao-hui, GAO Feng.The effects of design parameters on the sensitivity of fingertip's force transducers based on stewart platform[J].Acta Metrologica Sinica,2000(4):37-40.
[4]SONG Ai-guo,WU Juan,QIN Gang,et al.A novel selfdecoupled four degree-of-freedom wrist force/torque sensor[J].Measurement,2007,40(9-10):883-891.
[5]Kim G S,Shin H J,Yoon J.Development of 6-axis force/moment sensor for a humanoid robot’s intelligent foot[J].Sensors and Actuators A physical,2008(141):276-281.
[6]秦岗,曹效英,宋爱国,等.新型四维腕力传感器弹性体的有限元分析[J].传感技术学报.2003(9):238-241.QIN Gang, CAO Xiao-ying, SONG Ai-guo, et al.Finite element analysis for elastic body of new 4-Axis wrist force sensor[J].Journal of Transcluction Technology,2003(9):238-241.
[7]孙松良,刘正士,王勇,等.一种改进的六维腕力传感器[J].机械研究与应用,2005(6):35-37.SUN Song-liang,LIU Zheng-shi,WANG Yong,et al.A improved wrist force sensor without coupling[J].Mechanical Research and Application,2005(6):35-37.
[8]贾伯年,俞朴.传感器技术(修订版)[M].南京:东南大学出版社,2000.
猜你喜欢
科学技术创新(2022年34期)2022-12-07
仪表技术与传感器(2022年7期)2022-08-30
——以赣州市龙南县为例
四川建材(2020年7期)2020-07-26
环境与发展(2019年4期)2019-08-06
通信电源技术(2019年2期)2019-03-23
石油沥青(2019年1期)2019-03-05
创新创业理论研究与实践(2018年22期)2018-03-28
环境保护与循环经济(2017年6期)2018-01-22
电子技术与软件工程(2016年6期)2016-05-14
电测与仪表(2014年16期)2014-04-22
