
基于PC/104的武装直升机观瞄装置检测系统设计和实现✴
2012-06-02 08:19:28竹武林范惠林刘成亮侯满义
测试技术学报 2012年1期
竹武林,范惠林,刘成亮,侯满义
(空军航空大学航空军械系,吉林长春 130022)
某型武装直升机装备了第三代观瞄装置,实现对目标的搜索、探测、捕获、跟踪、瞄准,观瞄装置的性能决定了武器系统的跟踪性能、瞄准精度和命中精度.对观瞄装置的工作性能进行检测,将有助于提高观瞄装置和整个武器系统的工作可靠性,保证武器正常发射和精确命中.本文研究实现了基于PC/104的观瞄装置检测系统.
1 检测原理与需求分析
观瞄装置是光、机、电一体化系统,装有多种精密光电器件,各种信号交织复杂.观瞄装置的光电吊舱内部安装有红外热像仪、电视观瞄仪、激光测距机等光电组件和加速度、角度位置传感器、陀螺仪等,此外还有力矩电机、伺服电路和驱动电路.其系统组成如图1所示.电子箱接收光电吊舱的状态数据、火控信息、图像信息,以及武器控制单元的火控参数等,经过转换后传输给综合显示器、火控计算机和武器控制单元,同时将外部操作命令和火控计算机命令进行处理,转换成指令,控制瞄准线运动和操作系统各组件[1].
光电吊舱与电子箱之间的通信接口采用的是RS-422标准.因此检测系统与光电吊舱进行RS422通信,采用主从通信方式获取吊舱内红外、电视和激光等部件传感器的自检信息、状态信息和参数信息,以确定各部件的工作状态.
火控计算机与武器控制单元之间通过ARINC429总线进行数据通信.检测系统模拟火控计算机,预存火控解算结果,转换成429编码数据,与武器管理单元通信[2],针对检测任务项将命令数据发送到武器控制单元;并接收武器控制单元上传的响应、数据和状态指示等.检测系统数据信号关系如图2所示.

图1 观瞄装置组成Fig.1 The structure of observing and aiming equipment

图2 检测系统数据信号关系图Fig.2 Relations between data flows in the test system
观瞄装置各机构部件的供电均为直流电,共有+28 V,+15 V,-15 V,+12 V,-12 V,+5 V 6种电压提供给各组件.检测系统测量经过电子箱后提供给光电吊舱的6路电压信号,检测电压变化情况及对观瞄装置性能的影响.
由于PC/104模块体积小、结构紧凑、可靠性高,将PC/104嵌入式工业测控平台应用到检测系统的开发中,其模块化的堆栈结构,使得系统易于配置,能显著提高在复杂环境下的检测性能.因此检测系统以PC/104嵌入式系统为控制核心,实现检测任务的调度管理、数据通信、数据的采集处理和显示等功能[3].
检测软件主要实现以下功能:①管理通信接口卡和数据采集卡的硬件资源;②运行检测软件,管理调度检测任务;③实现串行通信协议和ARINC429协议;④实时收发和处理数据.
检测软件平台选择Windows XP,软件开发环境选择VisualC++6.0.
2 硬件设计
系统硬件主要由PC104计算机、串行通信卡、ARINC429总线接口卡、数据采集卡、信号调理电路板、LCD显示器、电源及键盘鼠标组成,如图3所示.系统扩展板卡共占用68个8 b IO空间地址,避开主板已占用的地址,在BIOS设置了3个板卡的基地址和地址空间大小.
观瞄光电吊舱的组件OCU、TV、LR、FLR与检测系统之间通信的速率、数据帧长度、数据内容不同,因此将串行通信卡提供的4个端口分别对应4个部件,每个通道单独接收,降低了软件处理数据的复杂性[4].每个通道16Bytes的FIFO缓冲区,使得系统忙的时候,避免了因不能快速处理中断而导致的数据丢失,降低了CPU的负载.
检测系统通过ARINC429总线与武器管理单元和光电吊舱通信,每个通道配有独立的256 b×16 b的FIFO.
在检测6路电压信号时,设计了信号调理电路,将各路电压变换到A/D卡模拟量输入的范围内.同时检测仪的数据通信避开电源信号,防止干扰.

图3 硬件系统组成框图Fig.3 The framework of hardware system
3 软件设计及关键技术
3.1 检测软件结构和功能
检测软件采用模块化设计[5],分为观瞄自检、传感器功能检测、火控信息检测、数据文件管理和用户管理5个模块.软件的逻辑结构如图4所示.
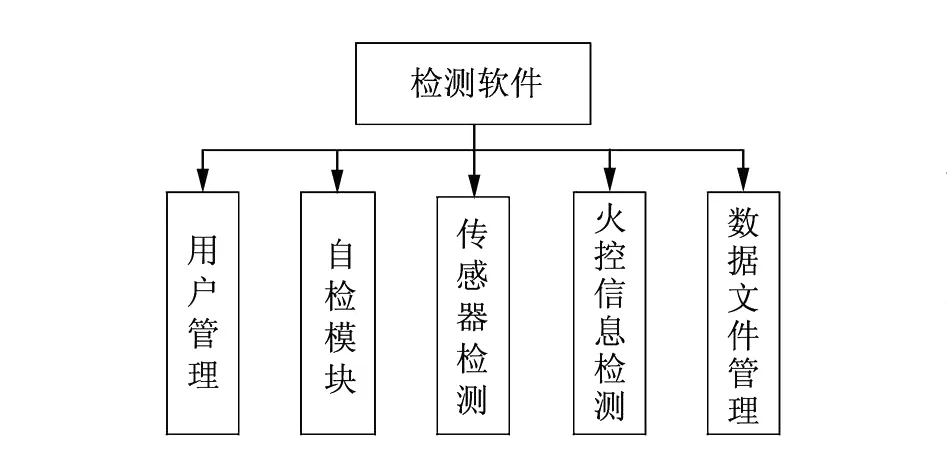
图4 检测软件逻辑结构图Fig.4 The logical structure of the software
软件初始化包括软件界面库和驱动程序接口函数库的加载,板卡的参数设置,通信参数设置,通信板卡的上电自检,用户界面线程、数据接收线程和数据处理线程的创建.
自检模块在观瞄上电后检测系统向观瞄发送强制自检命令,观瞄向检测系统回复自检信息,完成观瞄的自检;传感器检测模块和火控信息检测模块分别对各自部件的检测进行控制,向检测部件发送控制命令,接收响应信息并进行处理,确定各部件的状态;数据文件管理模块实现检测结果的自动保存、调阅,Excel文件的管理等;用户管理模块负责用户目录的创建,提供登录检测软件、更改用户和密码等服务.
3.2 多线程处理
检测系统需要实时接收和处理观瞄发送的命令响应信息,而Windows XP操作系统是非实时操作系统,为了保证系统检测的实时性,软件采用了多线程技术.在软件初始化时,创建了用户界面线程和两个数据接收线程.用户界面线程负责界面处理,包括响应用户的输入和各种事件消息[6].对于实时性要求不高的电压量数据,软件初始化时创建定时器,在消息响应函数中实现定时采集电压量信号,并进行处理和显示.
串口数据接收线程通过查询方式循环检测各通道的FIFO,当FIFO里有数据并且判断数据量大于等于数据帧长度时,接收数据;而ARINC429数据接收线程一直检测通道的FIFO,FIFO不为空时接收数据.串口数据接收控制流程如图5所示.
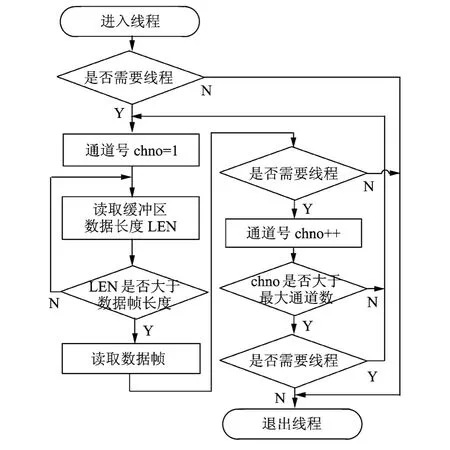
图5 串口数据接收控制流程Fig.5 The control flow of receiving serial data
3.3 串行通信差错控制
串行通信通常采用主从式结构.本文设计的检测系统工作在主站模式,负责数据结构的组成、数据的发送接收和处理,观瞄工作在从站模式,响应主站的命令并回复相应的状态信息[7].
观瞄收到检测系统的控制命令后作出响应,向检测系统回复相应的状态信息,数据帧格式包括两方面的内容:即检测系统下发给观瞄控制命令和观瞄上传给检测系统的状态响应数据.图6所示为状态信息编码格式[8].
直升机上有多种电子设备,电磁环境复杂,数据通信过程中会受到多种噪声信号的干扰,为了保证数据传输的可靠性,数据通信必须有差错控制功能.串行通信采用限定时间接收和计算校验两种方法来判断数据传输错误,并进行差错处理[9].
当接收到一帧数据后,首先计算各字节的校验和,与数据帧的校验字节比较,若不相同即接收信息无效,检测系统不对接收数据进行处理,并显示错误信息.而观瞄则不执行错误的控制命令.
在主从式通信方式中,通信由主站发起,当检测系统发出一帧数据后,检测软件启动一个定时器,如果在定时器设定的时间内,检测系统没有收到观瞄的应答帧(即状态数据信息),检测系统则作出超时响应,并重发数据[10],若超出规定的发送次数仍无响应,检测软件报告通信错误.串行通信控制流程如图7所示.

图6 状态信息编码格式Fig.6 The format of coding status information data

图7 串行通信控制流程Fig.7 The control flow of serial communication
4 结束语
PC/104嵌入式计算机作为控制核心的观瞄装置检测系统,采用多线程,提高了检测的实时性,采用差错控制技术,提高了数据通信的可靠性.应用结果表明,整个系统设计合理,工作可靠,检测精度高,操作维护方便,在功能上完全满足对直升机观瞄装置的测试需求,提高了故障检测与诊断效率,提高了武装直升机的维护保障能力.
[1]李阳.武装直升机昼夜观瞄系统电气系统设计与分析[D].南京:南京理工大学,2004.
[2]陈芳.基于PC/104的ARINC429通讯总线的设计与实现[D].南京:南京航空航天大学,2005.
[3]王虎,段哲民,王海涛.基于多线程的太阳能阵列数据采集系统[J].计算机测量与控制,2009,17(1):228-230.
Wang Hu,Duan Zhemin,WangHaitao.Multi-threaded dataacquisition system of solararrays[J].Computer Measurement&Control,2009,17(1):228-230.(in Chinese)
[4]张超,许化龙.导弹控制系统数据采集系统设计[J].计算机测量与控制,2009,17(10):2015-2017.
Zhang Chao,Xu Hualong.Design of data acquisition system based on PC/104Bus for missile control system[J].Computer Measurement&Control,2009,17(10):2015-2017.(in Chinese)
[5]王婷,朱庄生.星务管理软件框架设计与实现[J].系统仿真学报,2010,S1:34-37.
Wang Ting,Zhu Zhuangsheng.Design and realization of the housekeeping software frame[J].Journal of System Simulation,2010,S1:34-37.(in Chinese)
[6]刘书智,李琳娜.Visual C++实践与提高——串口通信与工程应用篇[M].北京:中国铁道出版社,2009:41-53,131-140.
[7]李文明,张涛,郑丽娜.基于主从多机通信控制器的设计与实现[J].计算机测量与控制,2008,16(5):657-659.
Li Wenming,Zhang Tao,Zheng Lina.Design and realization of multi-chip communication of master and slave[J].Computer Measurement&Control,2008,16(5):657-659.(in Chinese)
[8]张海林,杨勇.自动化系统中的串行通信协议的设计[J].计算机工程与应用,2003,31:159-160,218.
Zhang Hailin,Yang Yong.The design of serial communication protocol in automatic control system[J].Computer Engineering and Applications,2003,31:159-160,218.(in Chinese)
[9]杜晓滔.基于PLC和串行通信的船舶电站监控系统的设计与实现[D].武汉:武汉理工大学,2008.
[10]徐会杰.数据采集系统中串行通信协议的设计与实现[J].河南科技大学学报:(自然科学版),2008,29(5):30-32.
Xu Huijie.Design and implementation of serial communication protocolin data acquisition system[J].Journalof Henan U-niversity ofScience&Technology,2008,29(5):30-32.(in Chinese)
猜你喜欢
中国新技术新产品(2023年1期)2023-04-07 02:25:26
科学大观园(2022年14期)2022-07-17 03:54:41
小学科学(学生版)(2021年7期)2021-07-28 06:44:42
科技传播(2019年22期)2020-01-14 03:06:34
消费导刊(2017年20期)2018-01-03 06:26:40
航空模型(2016年10期)2017-05-09 06:30:58
环球市场(2017年36期)2017-03-09 15:48:21
衡阳师范学院学报(2015年3期)2015-02-10 06:02:23
中国舰船研究(2014年6期)2014-05-14 06:45:24
吉林建筑大学学报(2012年3期)2012-08-15 00:54:52
