
基于混沌时间序列的多步预测方法研究✴
2012-06-02 08:16陆建山王昌明张爱军
测试技术学报 2012年1期
陆建山,王昌明,张爱军,孙 罡
(南京理工大学机械工程学院,江苏南京 210094)
海上载体工作时极易受到浪、涌等因素的影响,不可避免地发生摇摆运动,该运动对平台上设备的正常工作极其不利.目前对海上载体运动状态的研究多集中于海浪作用下的大型舰船,现有的各种减摇装置多为被动式控制,若能预知载体运动进而提前控制,将极大地改善减摇效果[1].海上多功能稳定平台作为浮式平台独立工作时,相对于大型舰船,更易受到海浪的影响.因此,有必要对海上多功能稳定平台的载体横滚姿态预测问题进行深入研究.
海上载体运动姿态的预测方法主要有时域分析法和频域分析法,时域分析法可在线参数估计和建模,比频域法更接近海上实际情况.常用的时域分析法有AR(自回归模型)、周期图法、混沌时间序列法等,文献[1]应用AR模型对船舶横摇运动时间序列预报并取得了较好的效果,预报误差为4.4%左右;文献[2]建立了基于混沌理论相空间重构技术的RBF神经网络模型,并将其应用于舰船摇荡运动极短期预测中.虽然上述文献都取得了预期的效果,但均局限于海上载体运动的短期预测.文献[2]中说明了舰船摇荡运动具有混沌特性,本文拟采用混沌时间序列加权一阶局域法对试验水池实测数据进行预测,并通过误差预测值实时补偿时间序列预测值,实现横滚姿态的多步预测.
1 加权一阶局域法原理
1.1 混沌特性判定
实测时间序列不可避免地带有噪声,而混沌是确定性非线性系统产生的一种类似随机的不规则运动,其与随机噪声有本质的区别,两者不可混淆,因此在对时间序列应用混沌时间序列方法分析之前首先得判定其混沌特性.目前已有多种混沌特性判定方法,如Poincare截面法、Lyapunov指数法、指数衰减法、频闪法等.本文拟采用最大Lyapunov指数对试验池实测时间序列是否具有混沌特性做出判定.Lyapunov指数是沿轨道长期平均的结果,是一种整体特征,若系统最大Lyapunov指数小于0,那么该系统的变化有确定性的规律,非混沌时间序列,若系统最大Lyapunov指数大于0,则系统一定是混沌的,其可预测的时间跨度近似地认为是Lyapunov指数的倒数[3].
1.2 加权一阶局域法模型[4-7]
设某系统变量的时间序列为{x1,x2,…,xN),N为序列长度,其重构后的相空间为

式中:m为嵌入维数;τ为时间延迟,M=N-(m-1)τ.
由式(1)可见,为得到重构相空间,必须选择合适的嵌入维数和时间延迟,本文采用C-C法计算m和τ.C-C法应用关联积分同时估计出时间延迟τ和嵌入窗宽τω的值,再利用 τω=(m-1)τ求出嵌入维数m.
设中心点为YM,YMi(i=1,2,…,q)为中心点的邻近点,并且到YM的距离为di,dmin是di中的最小值,定义点YMi的权值为

则一阶局域线性拟合为
式中:a,b为拟合系数;YMi+1=(YM1+1,YM2+1,…,YMq+1)T是YMi=(YM1,YM2,…,YMq)T演化一步后的相点.
当m=1时(m>1情况类似),根据加权最小二乘法,有:

解式(4)得到拟合系数a,b,并带入一步预测公式YM+1=a+bYM,得YM=(xM,xM+τ,…,xM+(m-1)τ)的一步预测YM+1=(xM+1,x(M+τ)+1,…,x(M+(m-1)τ)+1),YM+1中的x(M+(m-1)τ)+1即为原序列的一步预测值 ^xN+1.
2 加权一阶局域法多步预测方法
将预测值作为新息加入原时间序列并重复一步预测步骤即可实现多步预测,但这种方式会造成误差的大幅积累.因此,本文旨在寻找一种既能抑制误差积累,同时又不损失算法速度的方法解决上述问题.文中设想在对时间序列预测时,将误差序列作为另一时间序列,使用一种简单快速的方法同时对误差进行预测,然后用误差预测值实时修正时间序列预测值.其算法流程为:①读取时间序列值,计算嵌入维数m和时间延迟τ;②进行相空间重构,并判定混沌特性;③运用加权一阶局域法进行预测;④对误差序列进行预测,得到当前误差预测值;⑤用误差预测值对加权一阶局域法预测值进行修正,并作为最终的时间序列预测值输出;⑥将误差修正前的预测值带入原时间序列、将误差预测值带入误差序列并去掉最早时刻的误差数据,读取新序列,转至 ③.
重复上述步骤,直至预测结束.对于 ④中的误差序列预测,下文给出了两种不同的方法.
2.1 平均值法
平均值法是误差序列外推最为简单的方法之一,为保证预测速度同时又不失预测准确性,采用当前预测的前4个误差值进行平均值法外推,计算出当前时刻的误差值,其预测模型为

式中:ei为当前预测误差,ei-1,ei-2,ei-3,ei-4分别为前4步的预测误差,最初4步预测时,(ei-1,ei-2,
ei-3,ei-4)分别为(0,0,0,0),(ei-1,0,0,0),(ei-1,ei-2,0,0),ei-1,ei-2,ei-3,0).
2.2 LPC法[9]
平均值法的拟合系数固定,而LPC(Linear Predictive Coding,线性预测编码)基于均方误差最小原则对AR模型参数进行估计,由过去样本值直接决定一组拟合系数,在语音信号处理等领域得到了广泛应用.
p阶线性预测是将过去p个时刻的值通过线性预测系数加权得到当前值,则有

式中:ai(=1,2,…,p)为线性预测系数;p为预测阶数,本文p=4.
常见的线性预测系数方法有自相关法、格型法、协方差法等,其中自相关法运算速度较快.本文选用自相关法,利用杜宾(Durbin)算法提取线性预测系数.

图1 原始时间序列Fig.1 Original time series
3 试验与分析
在南京理工大学水中兵器研究所的水靶道(110 m×2.5 m×2.5 m)中进行了试验,通过姿态测量系统采样得到一组横滚角度数据,其样本总长度为1 000 m,时历如图1所示.
3.1 加权一阶局域法多步预测仿真分析
为应用混沌时间序列预测方法进行分析,首先应用最大Lyapunov指数法对横滚时间序列进行混沌特性判定,通过C-C法计算嵌入维数和时间延迟τ以进行相空间重构,其计算结果如表1所示.

表1 时间序列的混沌特性判定结果Tab.1 The judging results of chaotic characteristics of time series
由表1可见横滚时间序列的最大 Lyapunov指数大于0,故判定序列为混沌时间序列,可应用加权一阶局域法进行预测.采用前900个点进行相空间重构后作为预测样本,后 100个点作为检验样本,应用无补偿的加权一阶局域法对后100步进行预测,预测效果如图2所示.
由图2可见:无补偿的加权一阶局域法在最初十几步内的预测基本可信,其后的预测可信度很差.且随着预测步数的增加,误差有发散迹象.出现这种情况主要是因为第二步预测会用到第一步的预测值,依此递推,因此出现了误差的累积.这也验证了混沌时间序列可应用于运动姿态的短期预测中,但其多步预测效果较差,需对算法进行改进.

图2 无误差补偿的多步预报Fig.2 Multi-step predicting without error compensation
3.2 误差补偿的多步预测仿真分析与对比
为解决误差累积的问题,本文将采取误差补偿的方法对加权一阶局域法的预测值进行在线修正.分别采用平均值法误差补偿和LPC法误差补偿的多步预报方法对后100步进行预测,两种方法的预测效果如图3,图4所示.为更好地说明预测算法性能,方便各种方法间的对比分析,使用最大预测误差、绝对误差均值以及相对均方误差作为性能评价指标,对各种方法给出评价.其中,相对均方误差反映了预测值相对于实际观测值的偏离程度.各方法的性能指标评价结果见表2.
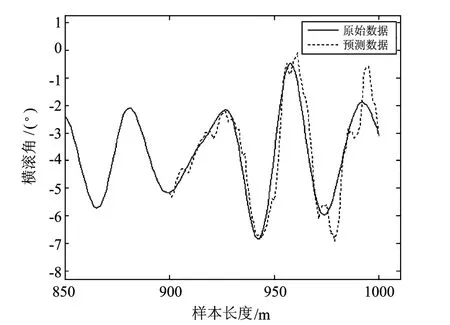
图3 平均值法误差补偿的多步预报Fig.3 Multi-step predicting with error compensation by the mean

图4 LPC法误差补偿的多步预报Fig.4 Multi-step predicting with error compensation by LPC

表2 预测效果比较Tab.2 The comparison of predicting effects
结合图2~图4和表2,可得:
1)经过误差补偿处理后的多步预测,精度得到了很大提高.两种补偿预测方法中,平均值法误差补偿的预测效果较差,但由表2可见其预测的整体效果相对于无误差补偿的多步预测也提升了近一倍.其预测曲线与图2相比,改善了无误差补偿时,误差累积的影响,仅在预测曲线尾部拐点处出现了较大误差,相对均方误差为0.000 447 21,与实际观测曲线也较为吻合.
2)LPC法每次均通过过去的预测误差样本在线拟合出一组系数,改善了平均值法系数固定的缺点,故LPC法误差补偿的多步预测效果优于平均值法.其最大误差仅为 0.822 96°,相对于无补偿时的-3.2758°有了很大提高,且绝对误差均值只有0.264 94°.由图4可看出,除拐点处个别较大误差外,其预测曲线与实际观测曲线吻合度很高,表2也可说明了这一点,其相对均方误差仅为0.000 214 36.
4 结 论
本文从多功能稳定平台运动姿态研究的实际需要出发,提出使用误差补偿的加权一阶局域多步预测方法对平台载体横滚姿态进行预测.文中给出了两种误差补偿的方法,并进行了详细描述.对试验水池的实测数据运用最大Lyapunov指数法进行混沌特性判定后,分别使用两种方法进行预测,并与无误差补偿的多步预测进行对比分析.结果表明,误差补偿的多步预测方法抑制了误差的累积,达到了预期的预测精度,同时通过误差评价指标表明LPC法的预测精度最高,且算法过程较简单,可用于稳定平台载体横滚姿态的多步预测.
[1]马洁,李国斌.船舶横摇运动的时间序列预报[J].北京机械工业学院学报,2006,21(1):4-7.
MA Jie,LI Guobin.Time series prediction of ship rolling[J].Journal of Beijing Institute of Machinery,2006,21(1):4-7.(in Chinese)
[2]侯建军,东日方,蔡烽.混沌理论和神经网络相结合的舰船摇荡运动极短期预报[J].舰船科学技术,2008,30(1):67-70.
Hou Jianjun,Dong Fang,Cai Feng.Extreme short term prediction of ship swaying motions based on combination of chaos and neural network[J].Ship Science and Technology,2008,30(1):67-70.(in Chinese)
[3]徐建闽,傅惠,许伦辉.关联交叉口短时交通流可预测性分析及组合预测算法[J].华南理工大学学报(自然科学版),2007,35(10):194-232.
Xu Jianmin,Fu Hui,Xu Lunhui.Forecastability analysis and combination forecast algorithm for short-term traffic flow of related intersections[J].Journal of South China University of Technology(Natural Science Edition),2007,35(10):194-232.(in Chinese)
[4]吕金虎,陆君安,陈士华.混沌时间序列分析及其应用[M].武汉:武汉大学出版社,2002:102-104.
[5]孙罡,王昌明,张爱军.基于混沌时间序列的单点 GPS定位误差预测方法[J].测试技术学报,2010,24(3):219-224.
Sun Gang,Wang Changming,Zhang Aijun.The method of error prediction in GPS point positioning based on chaotic time series[J].Journal of Test and Measurement Technology,2010,24(3):219-224.(in Chinese)
[6]马娟,徐培凯.基于改进加权一阶局域预测模型的负荷预测方法研究[J].控制理论与应用,2009,28(9):15-17.
MA Juan,XU Pei-kai.Load forecasting based on an improved weighted first-order model[J].Control Theory and Applications,2009,28(9):15-17.(in Chinese)
[7]张文鸽,黄强,佟春生.径流混沌时间序列局域多步预测模型及其在黄河上游的应用[J].水力发电学报,2007,26(4):11-15.
Zhang Wenge,Huang Qiang,Tong Chunsheng.Chaotic local-region multi-step forecasting model of flowtime series and its application on the upper reach of the Yellow river[J].Journalof Hydroelectric Engineering,2007,26(4):11-15.(in Chinese)
[8]赵源,滕大予.多维AR(p)模型在预报舰船运动中的应用[J].现代防御技术,2003,31(4):52-55.
Zhao Yuan,Teng Dayu.Application of multidimensional AR(p)model in forecasting the state of ship movement[J].Modern Defence Technology,2003,31(4):52-55.(in Chinese)
[9]王元.G.723.1标准在TMS320VC5402上的实现[D].成都:电子科技大学,2002:14-16.
猜你喜欢
今日农业(2021年19期)2022-01-12
环境保护与循环经济(2021年7期)2021-11-02
国外核新闻(2020年8期)2020-03-14
山东冶金(2019年5期)2019-11-16
人生十六七(2016年14期)2016-12-01
光学精密工程(2016年6期)2016-11-07
中国医学装备(2015年10期)2015-12-29
太阳能(2015年12期)2015-04-12
电测与仪表(2015年7期)2015-04-09
现代农业(2015年1期)2015-02-28
