
分布式多入多出雷达相干处理二维分辨率分析
2012-05-29 07:16:07苏卫民
电波科学学报 2012年2期
陈 刚 顾 红 苏卫民
(南京理工大学电子工程与光电技术学院,江苏 南京 210094)
引 言
相对于光学成像,雷达成像具有全天候、全天时、远距离、可探测隐蔽目标等诸多优势[1]。目前应用最为广泛的雷达成像技术是合成孔径雷达(SAR)成像和逆合成孔径雷达(ISAR)成像。二者都是利用目标与雷达的相对转动获得横向的高分辨,并通过发射大带宽信号获得纵向距离的高分辨。但信号带宽的增加,将带来雷达信号处理难度的加大、系统复杂度的提高以及设备成本的上升[2]。多输入多输出(MIMO)雷达是近年来提出的一种新的雷达体制,在国内外引起人们越来越多的关注,研究表明它能突破信号带宽的限制,获得很高的横纵二维分辨率[3],这为雷达成像提供了新的方法。
MIMO雷达主要分为两类,一类收发天线密集放置,称为紧凑式MIMO雷达[4-6];另一类收发天线广域分布,阵元间距离较大,称为分布式MIMO雷达[7-10]。紧凑式MIMO雷达主要利用波形分集,它能明显改善雷达目标参数识别能力、提高发射波形设计的灵活性、增大可同时探测目标的数量[11-12]。而分布式MIMO雷达主要利用空间分集,在非相干信号处理模式下,可克服传统雷达中由于目标雷达散射截面(RCS)闪烁带来的检测性能下降[10];在相干信号处理模式下,能获得很高的横纵二维分辨能力[3]。
分布式MIMO雷达工作在相干处理模式时,各发射阵元发射时域正交信号,而各接收阵元接收所有发射信号对应的回波,通过匹配滤波器组将不同路径回波分离,然后集中对各路回波信号进行相干处理,利用回波信号相位中包含的时延信息获得高分辨能力。文献[3]推导了分布式MIMO雷达相干处理定位误差的克拉美罗下界,并对相干处理模糊函数和非相干处理模糊函数进行对比,得出相干处理模式具有很高定位精度和分辨率的结论。文献[13]进一步对比分析了分布式MIMO雷达在进行相干处理和非相干处理两种情况下,目标定位误差的克拉美罗下界,得出影响相干处理模式定位精度的因素等结论。本文在现有研究的基础上对分布式MIMO雷达相干处理模式的分辨率进行了详细研究,推导出该模式下分布式MIMO雷达横向、纵向分辨率的数学公式,并分析了影响二维分辨率的因素。
1.分布式MIMO雷达信号模型
分布式MIMO雷达阵列结构如图1所示,为分析雷达横纵二维分辨能力,假设所有阵元和目标位于同一水平面,系统由M个发射阵元T1,T2,…,TM和N个接收阵元阵元R1,R2,…,RN组成,发射阵元最小间距为dt,接收阵元最小间距为dr,二者均满足[8]
(1)
式中:λ是发射(接收)信号载波波长;r是目标与阵列间距离;D是目标切向尺寸。发射和接收阵元均满足空间分集条件。在图1中,以雷达监视区域中心为原点建立直角坐标系。假设目标是静止不动的点散射体,坐标为P=[xp,yp]T,其反射系数与电磁波入射方向无关,即各向同性。同时假设收(发)阵元到目标距离引起的信号衰减近似为常数,可对各接收阵元所接收到的信号进行相干处理。定义阵元相对目标的角度为它和目标之间连线与y轴的夹角,第i个发射阵元相对于目标的角度为θt,i,第j个接收阵元相对于目标的角度为θr,j.
图1 分布式MIMO雷达阵列结构
第i个发射阵元发射的信号为
(2)

(3)
式中:si(t)表示第i个发射波形的复包络,即基带信号。假设不同基带信号在存在相对时延情况下近似正交,即满足

(4)
第i个发射阵元发射的信号,经点目标P=[xp,yp]T反射后,被第j个接收阵元接收,接收信号表示式为:
(5)

(6)
(7)
式中c代表光速。对式(7)进行泰勒展开,得
(8)
因为
(9)
所以将式(9)代入式(8),得
sinθr,j)xp+(cosθt,i+cosθr,j)yp]
(10)

(cosθt,i+cosθr, j)y]
(11)
2.相干处理模式分辨率分析
模糊函数是分析雷达分辨率的重要工具。假设目标位于坐标原点,可得归一化后的MIMO雷达二维模糊函数[3]:

(12)
模糊函数的主瓣宽度表征了雷达对于多个目标的分辨能力。求模糊函数的主瓣在x、y方向上的3 dB宽度Wx、Wy,即求解以下2个方程
(13)
(14)
但因为式(13)和(14)为超越方程,难以得到解析解,只能通过图像法等方法求解,计算量较大,且无法对影响主瓣宽度的因素进行进一步分析,所以,采用抛物线拟合的方法求解模糊函数主瓣宽度。
(15)
假定目标位于坐标原点,与收发阵列距离r=3 000 m,阵元相对目标的角度θt,i和θr,j在[-θmax,θmax]范围内均匀分布,信号中心频率fc=2 GHz.图2是发射阵元数M=8、接收阵元数N=8,θmax=45°时,不同信号带宽条件下,通过式(12)和式(15)仿真得到的主瓣宽度。其中横坐标为信号带宽与中心频率比值,纵坐标为主瓣宽度和信号波长的比值。
图2 式(12)和式(15)x、y切面主瓣宽度对比
从图2可以看出,在不同带宽条件下,二者主瓣宽度近似相等。改变仿真条件中的阵元数目M、N和角度范围θmax,统计不同带宽时式(15)与(12)主瓣宽度相对误差的平均值,结果如表1所示。从表1可以看出,在阵列相对目标形成一定张角的情况下,用式(15)的主瓣宽度代替式(12)的主瓣宽度误差很小,且误差平均值随着角度范围的增大而迅速下降。因此,为简化分析,计算模糊函数x切面和y切面主瓣宽度时,用式(15)代替式(12)。

表1 不同带宽时式(15)与式(12)主瓣宽度相对误差的平均值
式(15)沿x轴和y轴切割得到的图形函数分别表示为Ap([x,0]T)和Ap([0,y]T),将式(11)代入x切面函数,得

(16)
式中
sinθt,k)
(17)
sinθr,k)
(18)
将式(17)和(18)代入式(16),得

(19)
用抛物线p(x)=a-bx2对Ap([x,0]T)进行拟合,所得抛物线的3 dB宽度近似等于Ap([x,0]T)主瓣的3 dB宽度,称为Ap([x,0]T)主瓣的抛物线宽度PW,可得[14]
(20)
式中下标peak表示公式在峰值点处取值,对于Ap([x,0]T)而言即x=0处。由式(19)得
=1
(21)
和
(sinθt,l-sinθt,k)2+
(22)
将式(21)和(22)代入式(19),得
(23)
同理可得Ap([0,y]T)的抛物线宽度
(24)
式(23)和(24)即为分布式MIMO雷达进行相干处理时,模糊函数沿x轴和y轴切割得到的图形主瓣宽度的数学近似表达式,两式可用于衡量不同系统参数、不同布阵形式下的二维分辨能力。由式(23)和(24)可知,分布式MIMO雷达在相干处理情况下的分辨率具有以下特点:
1) 当阵元在局部围绕着目标分布时,信号带宽对分辨率影响不大;
2) 分辨率正比于发射信号波长λ,反比于发射信号中心频率fc,这是因为相干处理主要利用回波的相位信息进行定位。波长越短,则相位随目标位置变化的速度越快,分辨率越高;
3) 分辨率与各发、收阵元相对目标的角度有关,与各阵元和目标之间距离无关。可以直观地理解为,从不同侧面观察目标能获得更高的分辨率,这也就是分布式MIMO雷达的优势所在;
4) 对于x方向(横向)分辨率而言,假设发射、接收阵元分布在θmin≤θ≤θmax范围内,其中-90°≤θmin≤θmax≤90°.θmin越小、θmax越大,分辨率越高,即阵元相对于目标张角越大,分辨率越高,这与传统雷达通过大孔径获得横向高分辨类似;
5) 对于y方向(纵向)分辨率而言,假设发射接收阵元分布在|θ|min≤|θ|≤|θ|max范围内,其中0°≤|θ|min≤|θ|max≤90°.|θ|min越小、|θ|max越大时,分辨率越高。
3.仿真分析
3.1 公式计算与仿真结果对比
根据文献[3]中分布式MIMO雷达的模糊函数,即式(12),仿真阵列相对目标张角不同的情况下,模糊函数沿x轴、y轴切割得到图形的主瓣实际宽度MW,然后与文中推导的式(23)和(24)计算得到的主瓣抛物线宽度PW进行比较,以验证所得公式的正确性。假设MIMO雷达收发阵元在同一圆弧上均匀分布。该圆弧以原点为圆心,半径为5 000 m,左右两端和原点连线与y轴夹角分别为-θmax和θmax.θmax从30°到85°变化,步长为5°.各发射信号相互正交,中心频率为5 GHz,具有矩形的频率响应。仿真信号带宽分别为50 MHz和500 MHz,阵元数量分别为5发6收、9发9收、12发12收,共六种情况。得到主瓣宽度取实际宽度与信号波长λ的比值,结果如图3所示。

(a) 5发6收 (b) 9发9收 (c) 12发12收
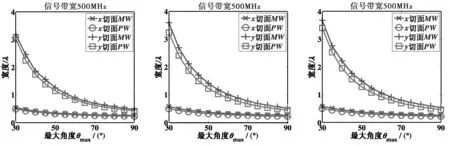
(e) 5发6收 (f) 9发9收 (g) 12发12枚图3 不同条件下分辨率随阵元角度范围变化情况
从图3可以看出,在不同信号带宽、不同阵元数量、不同阵列相对目标张角情况下,式(23)和(24)的计算结果都与文献[3]模糊函数沿x轴、y轴切割得到图形的主瓣宽度近似相等,很好地反映出分辨率随阵列相对目标张角增大而提高的趋势。
3.2 不同阵列的分辨率对比
根据二维模糊函数,即式(12),仿真比较3种不同布阵形式情况下分布式MIMO雷达的分辨率,观察分辨率是否具有第2小节总结的特点。假定雷达具有8个发射阵元、8个接收阵元;在每种情况下,收发阵元位置相同;不同情况之间,收发阵列相对目标的张角相同。第1种为线阵,发射(接收)阵元相对目标角度分别为[-45° -38° -31° -24° 24° 31° 38° 45°];第2种也为线阵,各发射(接收)阵元相对目标的角度在-45°≤θ≤45°范围内均匀分布;第3种情况,发射(接收)阵元在圆弧上均匀分布,该圆弧以坐标原点为圆心,两端与原点连线和y轴夹角分别为-45°和45°;3种阵列阵元位置如图4所示。其余仿真参数与3.1节相同。图5和图6分别为3种阵列情况下,模糊函数沿x轴、y轴切割得到的图形。
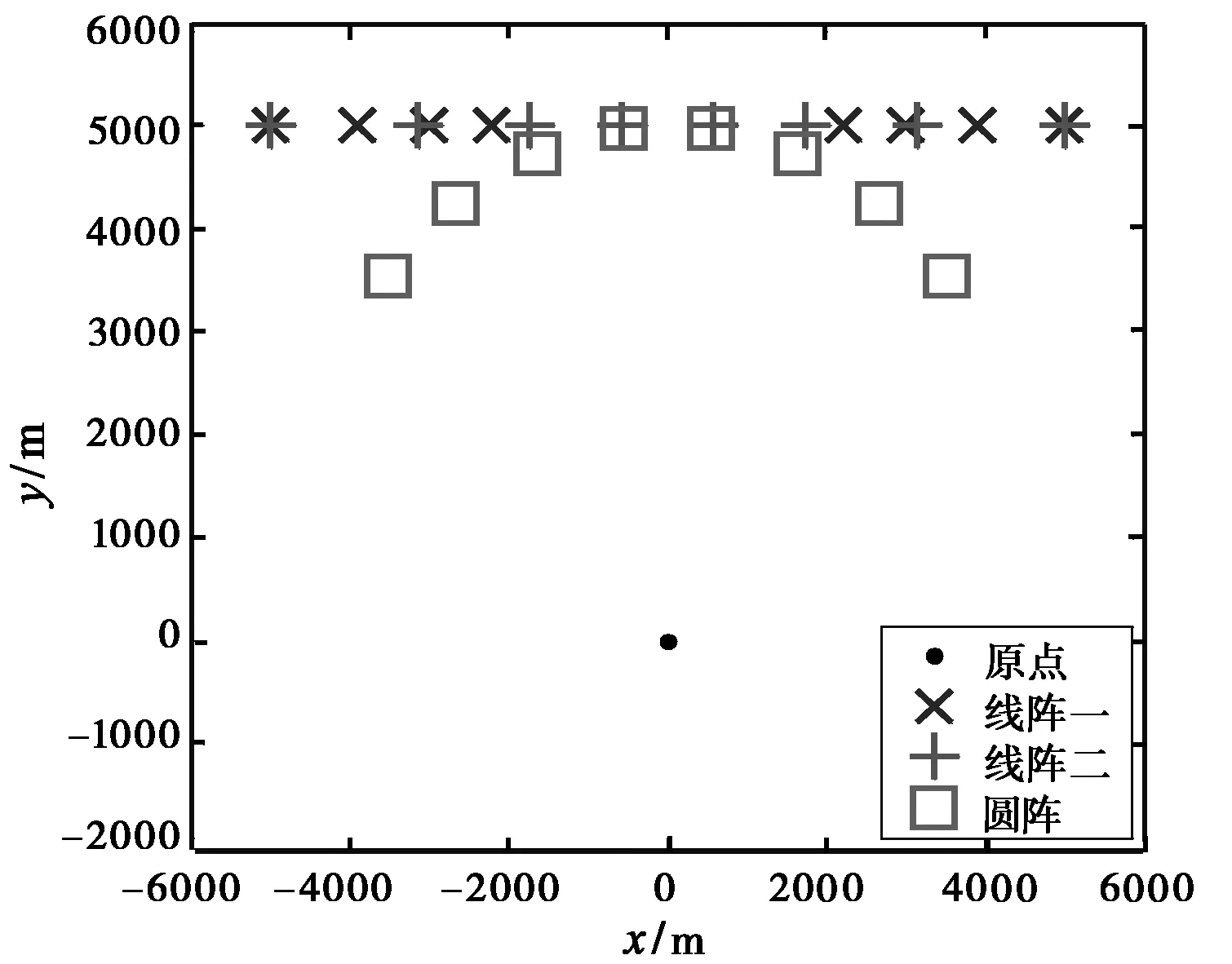
图4 三种阵列发射(接收)阵元位置示意图
1) 前两种阵列阵型相同,均为线阵,但阵元间距不同。二者θmin、θmax、|θ|max相同,线阵1的|θ|min大于线阵2的。从图5可以看出,两种线阵情况下模糊函数在x轴方向主瓣宽度基本相等,线阵1的模糊函数在y轴方向的主瓣宽度大于线阵2的,即线阵1纵向分辨率差于线阵2.验证了前一小节得出的分辨率特点4)和5).
2) 后两种阵列的阵型不同,对应阵元与坐标原点距离不同,但两种阵列各对应阵元相对于目标的角度相同,从图5和图6可以看出,两种阵列模糊函数沿x轴、y轴切割图形基本相同。结论与分辨率的特点3)吻合。
4.结 论
分布式MIMO雷达工作在相干处理模式时具有很高的二维分辨率,文中通过对分布式MIMO雷达模糊函数进行数学分析,利用抛物线拟合法计算模糊函数主瓣宽度,推导了其横向、纵向分辨率的数学表达式,并在此基础上分析了影响分辨率的因素。仿真结果表明,所得数学表达式和关于影响分辨率因素的分析结论,能准确反映分辨率随各种参数变化的情况。这些对于分布式MIMO高分辨雷达的系统参数选择,以及阵元布置具有指导意义和工程应用价值。
[1] 黄钰林, 杨建宇, 武俊杰, 等. 机载双站SAR分辨率特性分析[J]. 电波科学学报, 2008, 23(1): 174-178.
HUANG Yulin, YANG Janyu, WU Junjie, et al. Resolution characteristic analysis for bistatic airborne SAR[J]. Chinese Journal of Radio Science, 2008, 23(1): 174-178. (in Chinese)
[2] 黄 琼, 屈乐乐, 吴秉横, 等. 压缩感知在超宽带雷达成像中的应用[J]. 电波科学学报, 2010, 25(1): 77-82+202.
HUANG Qiong, QU Lele, WU Bingheng, et al. Compressive sensing for ultra2wideband radar imaging[J]. Chinese Journal of Radio Science, 2010, 25(1): 77-82+202. (in Chinese)
[3] LEHMANN N H, HAIMOVICH A M, BLUM R S, et al. High Resolution Capabilities of MIMO Radar[C]//Fortieth Asilomar Conference on Signals, Systems and Computers. Pacific Grove, CA, 2006: 25-30.
[4] FORSYTHE K W, BLISS D W. Waveform Correlation and Optimization Issues for MIMO Radar[C]//Conference Record of the Thirty-Ninth Asilomar Conference on Signals, Systems and Computers, 2005: 1306-1310.
[5] FUHRMANN D R, SAN ANTONIO G. Transmit beamforming for MIMO radar systems using partial signal correlation[C]//Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers. Pacific Grove, CA, USA, 2004, 1: 295-299.
[6] LUZHOU X, JIAN L, STOICA P. Adaptive Techniques for MIMO Radar[C]//Fourth IEEE Workshop on Sensor Array and Multichannel Processing. Waltham, MA, 2006: 258-262.
[7] HAIMOVICH A M, BLUM R S, CIMINI L J. MIMO Radar with Widely Separated Antennas[J]. IEEE Signal Processing Magazine, 2008, 25(1): 116-129.
[8] FISHLER E, HAIMOVICH A, BLUM R, et al. MIMO radar: an idea whose time has come[C]// Proceedings of the 2004 IEEE Radar Conference, 2004: 71-78.
[9] FISHLER E, HAIMOVICH A, BLUM R, et al. Performance of MIMO radar systems: advantages of angular diversity[C]//Conference Record of the Thirty-Eighth Asilomar Conference on Signals, Systems and Computers, 2004, 1: 305-309.
[10]FISHLER E, HAIMOVICH A, BLUM R S, et al. Spatial diversity in radars-models and detection performance[J]. IEEE Transactions on Signal Processing, 2006, 54(3): 823-838.
[11] JIAN L, STOICA P. MIMO radar with colocated antennas[J]. IEEE Signal Processing Magazine, 2007, 24(5): 106-114.
[12] 刘韵佛, 刘 峥, 谢 荣. 一种基于拟牛顿法的MIMO雷达发射方向图综合方法[J]. 电波科学学报, 2008, 23(6): 1188-1193.
LIU Yunfo, LIU Zheng, XIE Rong. Transmit pattern synthesis algorithm for MIMO radar based on Newton-like method[J]. Chinese Journal of Radio Science, 2008, 23(6): 1188-1193. (in Chinese)
[13]GODRICH H, HAIMOVICH A M, BLUM R S. Target localization accuracy gain in MIMO radar-based systems[J]. IEEE Transactions on Information Theory, 2010, 56(6): 2783-2803.
[14]JOHNSON D H, DUDGON D E. Array Signal Processing: Concetpts and Techniques[M]. Upper Saddle River: PTR Prentice Hall, 1993.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:38
中学生数理化(高中版.高二数学)(2021年2期)2021-03-19 08:54:12
现代苏州(2019年16期)2019-09-27 09:31:02
数学物理学报(2019年3期)2019-07-23 01:15:40
语言与文化论坛(2019年3期)2019-04-13 02:25:04
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
中学生数理化·中考版(2017年10期)2017-04-23 06:29:38
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:44
湖北文理学院学报(2017年2期)2017-04-16 05:09:06
