
微型无人机林火监测系统的设计与实现
2012-05-29 13:15马瑞升张利辉刘志平
浙江农林大学学报 2012年5期
马瑞升,杨 斌,张利辉,刘志平
(1.广西气象减灾研究所,广西 南宁 530022;2.国家卫星气象中心 遥感应用试验基地,广西 南宁 530022;3.淮阴师范学院,江苏 淮安 223300;4.中国空气动力研究与发展中心,四川 绵阳 621000)
森林是自然界中最为重要的生态系统之一。根据第7次全国森林资源调查结果,截至2008年,中国的森林覆盖率为20.36%,林业资源十分有限,保护好现有的森林对于实现可持续发展的战略目标具有重要意义[1]。森林火灾是威胁森林安全的最大因素之一。1950-2005年,中国平均发生的森林火灾超过1.3万次·a-1,林区过火面积占到森林总面积的5%[2],造成的经济和生态效益损失巨大。中国目前采用的林火监测手段主要有卫星遥感、塔台瞭望、地面巡视和飞机巡护等[2-5]。利用卫星监测林火的优势是覆盖面积大,1~2 d就可以获取一次覆盖全国的资料,但受自身轨道周期和天气影响,资料的实时性和分辨率欠佳。防火塔瞭望的实时性最好,但单塔的覆盖范围有限,需要组网配置,这大大增加了人员和设备成本,且近地面瞭望受地形影响大,存在视觉盲点。赵相瑜等[6]研制了基于视频图像和因特网(Internet)网络的嵌入式林火监测系统,可以实现监控点周围3 km的森林监控。类似系统用于塔台瞭望,可以减少人员配置,但密集组网的成本和长期维护的费用不可忽视。人工地面巡视工作量巨大,人员处于森林底层,视线遮挡严重,观察范围有限,效率低下。相对而言,飞机空中巡护监测林火的实时性和适应性俱佳,优点突出,但其保有和使用成本高,难以大规模、常态化运行,目前,多数林区只在重点防火时期租用飞机开展相关护林作业。无人机是一种新型的航空平台,近年来随着其技术的成熟已在气象探空、灾情监测、环境遥感等众多领域中得到应用[7-10]。特别是质量轻、体积小的微型无人机具有购置成本低、运行费用少、操作简便、机动灵活等特点,能够根据现场情况实时调整作业方案及载荷设备,非常适合用于森林火灾的监测作业。在中国气象局支持下,以原有工作为基础,设计研制了基于视频影像和烟雾自动识别技术的微型林火监测任务载荷设备,并与气象无人机共同构成微型无人机林火监测系统。在火情探测试验的基础上,进一步探讨了无人机林火监测系统可能的作业流程和应用方式。
1 无人机林火监测系统的设计
1.1 系统功能设计
森林火灾是一种无组织的燃烧过程,主要特点就是不完全燃烧,其外在表现为火灾发生时会有大量的烟气产生,特别是在初期火势较小时,这一现象尤为突出[11]。大量的实际经验也表明,在林火发生时烟与火往往是伴生的。特别是处于 “暗燃”状态的林火,烟的指示作用更加明显。且相对于明火而言,燃烧产生的烟雾在色彩和空间尺度上都具有更明显的特征,对传感器的要求更低,也更容易被自动识别。因此,系统设计时将林火监测设备的探测目标定为烟雾,通过对烟雾的检测来判断林火的发生。
从视觉探测的角度来看,对于一个目标的探测通常分为3个层次:①发现目标;②判识目标种类;③判明目标特征。这3个层次对应到林火烟雾探测上分别是:①发现林区可疑烟雾目标;②判明可疑烟雾是否为林火产生;③通过烟雾及其他信息判明林火的类型及发展态势等信息。
获取林火的种类及发展态势等信息涉及的因素众多,需要专业人员实践经验和大量其他信息的辅助,而减少和降低森林火灾损失的首要条件是能够做到“早发现”,因此,无人机林火监测系统的探测层次定位在了第2层次。即系统的功能设计目标是:能够自动检测林区可疑烟雾目标,并在人工辅助下确定是否有林火发生,同时通过人机交互给出火点位置、范围等相关参考信息。
1.2 技术路线与系统结构设计
为实现上述功能目标,拟采用常规摄像头为探测器,将获得的视频通过无线数据链路实时发回地面站,利用图像识别技术在传回的影像中自动检测烟火,并完成存档及报警工作。同时为提供林火的位置、范围和其他相关信息,系统配置了全球定位系统(GPS)、三轴姿态传感器和同轴数码相机。
无人机林火监测系统由无人机子系统和林火监测子系统两部分组成,其系统总体结构框架见图1。在设计上,为提高林火监测设备的通用性和可移植性,避免它们与无人机之间的相互干扰,在软硬件上2个子系统之间是完全隔离的。
1.3 烟雾检测技术方法
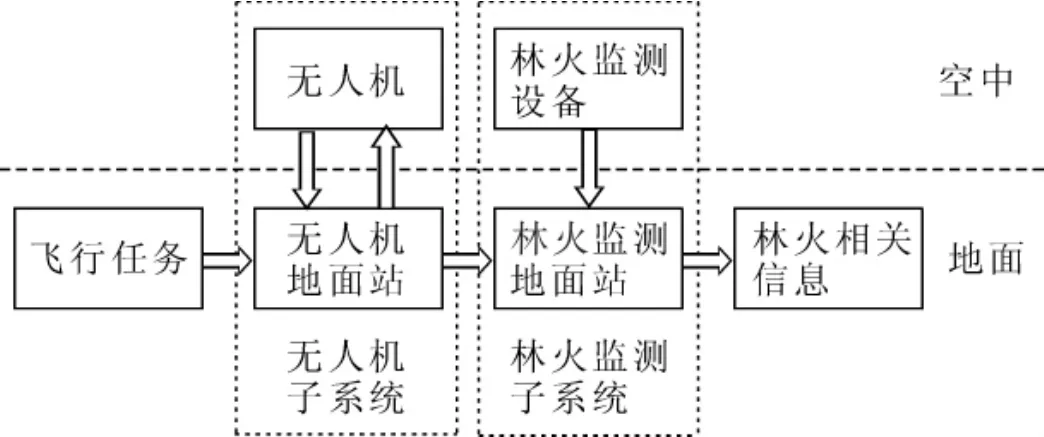
图1 无人机林火监测系统框图Figure1 Framework of UAV forest-fire monitoring system
以数码相机获取的高分辨率影像(图2a)为试验数据,将其中的烟雾区作为目标类别(图2b),以每个烟雾区像素的红绿蓝(RGB)值为分类依据,使用统计产品与服务解决方案(statisticalproduct and service solutions,SPSS)软件对其进行聚类分析,即可得到影像分类判别式:D=-0.124R+0.203G-0.05B-3.338。当像素运算后的D值大于0时为烟区,小于0时为非烟区。该判别式用于样本数据时,得到的统计结果见表1,其中类别1为烟区,类别2为非烟区,烟区像素的识别率为91.3%(图2c),误判为烟区的像素在判识所得烟区中占4.05%。考虑到烟的反射特性,在红绿蓝3个波段中波长最短的蓝波(B)段反射最强,在烟区像素中蓝波(B)值应是最大的(表2)。经过对样本数据的统计分析,94.0%的烟区像素满足判别式2×B-(R+G)>0,初次判识后的烟区经过再次判识优化后去除了绝大多数的非烟区误判(图2d)。由于烟雾具有连续性,故使用低通脉冲响应阵列对图像进行消噪处理,可以去除零散的误判点。消噪阵列的大小依据实际获取的影像可灵活调整,本例使用11×11阵列进行消噪处理 (图2e)。处理后的识别图,在保留烟区形状和特征的基础上,最大限度地降低了误判的可能性(图2f)。
将获得的烟雾识别模型和消噪参数用于其他同期林火影像得到的分析结果见表2。试验表明:此识别模型在同期影像中的烟雾识别率在77.0%以上,对于森林火灾中的主要烟区均可检出,无漏报情况的发生[12]。由于建立模型的样本和验证影像均在同一林火试验中取得,时间为9月下旬,地点为黑龙江省五大连池市引龙河林场,当地林区为稀疏白桦Betula platyphlla林,树种单一,故此识别模型可能对于北方秋季同类型森林的监测较为有效。对于其他季节、其他类型森林的烟雾识别模型可以参照本研究的方法,利用当地影像自行建模。
系统检测到烟雾后,由地面人员根据烟柱形状、浓度分布及其与地面角度等信息确认是否有林火发生,并判断火点在图像中的位置和范围。由于林火发生时烟雾的形状及扩散情况受到火点分布和天气条件的影响,变化复杂,规律性不强,目前难以做到程序自动判识,因此,需要地面监测人员依据实践经验判定火点相关信息。

图2 样本及识别过程Figure2 Modeling sample and recognition process

表1 样本图烟雾识别结果Table1 Recognition results of smoke sample

表2 林火影像烟雾识别结果Table2 Recognition results of forest-fire images
2 无人机林火监测系统的实现
2.1 无人机系统
系统的无人机平台由中国空气动力研究与发展中心提供,机体由通用靶机改造而成,使用汽油发动机作为动力,可手抛、弹射起飞,伞降或滑降回收,非常适合在林区小场地使用。该机型机身全长为1.5 m,翼展2.1 m,起飞质量7~8 kg,有效载荷1~2 kg,续航时间3 h,海拔升限5000 m,飞行速度为 80 km·h-1。
2.2 林火监测设备
无人机林火监测设备由空中和地面两部分组成,其详细结构参见图3。摄像头和数码相机作为机载设备的火情探测传感器使用,数码相机通过支架直接与无人机机体进行固连,两者在飞行中姿态一致。摄像头则通过两轴稳定云台与探测设备盒连接,在姿态传感器的支持下,机载计算机可以控制稳定云台使摄像头主光轴始终保持与地面的“垂直”。
在作业飞行中,地面站同时接收机载摄像头的视频影像和无人机的航向、经纬度、航高、俯仰角和侧滚角等参数信息,通过烟雾检测模块处理后就可以实时确定林区烟火的发生位置和范围,并在监视界面中高亮显示以提醒地面人员确认火情,及时做出反应。检测到有烟雾的影像会被自动以图片的形式记录下来,与影像同步的姿态、位置等数据也一并记录。飞行结束后,通过时间同步可以将这些资料用于数码相机影像的处理,从而获得更高质量的影像资料,以便进一步开展林区明火识别、态势评估、损失估算和改进检测模型等方面的工作。
限于篇幅,试制中选用设备的具体型号和参数不详细列出,仅给出完成后的林火监测任务载荷设备的主要技术指标如下:①实时视频影像分辨率380线,镜头视角70(°);②经采集卡获得的静态视频影像分辨率720×576;③数码影像行列数4368×2912,镜头视角84(°);④无线数据与视频链路通讯距离15 km;⑤全球定位系统(GPS)定位精度10 m,姿态传感器动态精度2(°);⑥设备机载部分(不含数码相机)质量小于1.2 kg,体积小于200 mm×120 mm×80 mm。
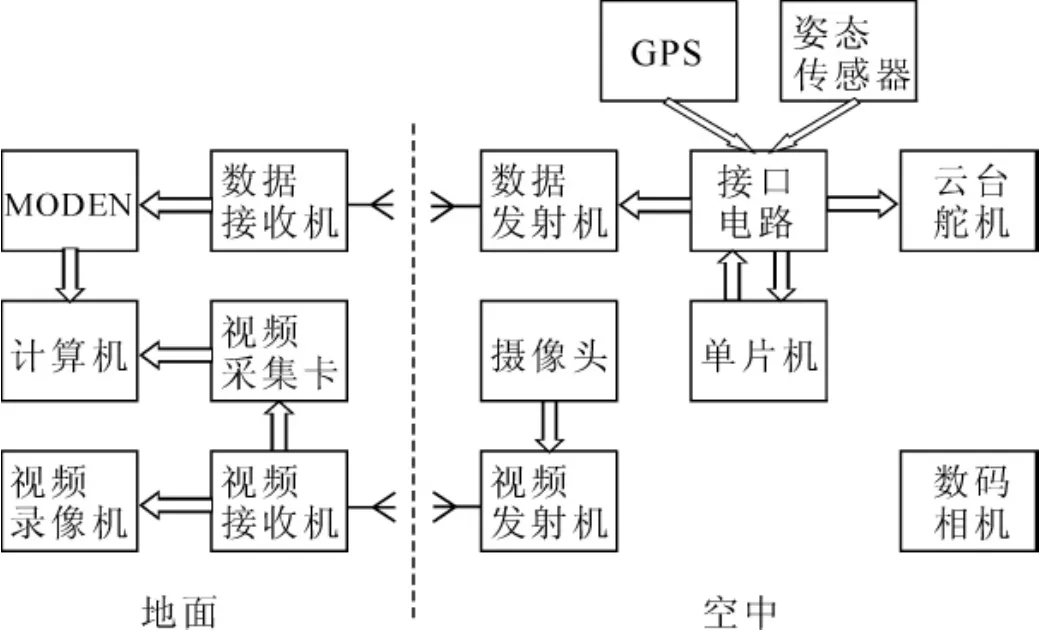
图3 无人机林火监测设备系统框图Figure3 Framework of UAV forest-fire monitoring device
2.3 地面站软件开发
无人机林火监测系统的软件包括无人机飞行测控和林火监测两部分,其中无人机测控软件由系统平台生产单位提供,不再详述。无人机林火监测系统地面站的运行界面参见图4。林火监测软件系统的开发以面向矩阵的第4代交互式数据语言(interactive data language,IDL)为工具,在Windows平台下完成。系统的功能构成主要包括:对目标影像进行自动烟雾检测的识别模型;对无人机飞行信息和影像数据进行保存记录的后台数据管理模块;对连续视频、火情影像和飞行参数等进行管理显示的图形显示模块等。此外,软件系统还包括了可视化的人机交互界面、背景地图管理和火场范围估算等基础构件。

图4 无人机林火监测系统地面站界面Figure4 Interface of UAV forest-fire monitoring system
2.4 火情探测试验
由于森林火灾具有突发性,且大多数林火的持续时间较短,因此,尚未在林区开展针对真实火灾的探测试验。为检验无人机林火监测系统的实际探测能力和作业表现,在四川省绵阳市近郊以人工火为目标进行了火情探测试验。
试验火点以作物秸秆和灌木枯枝为燃料,燃烧面积约1 m2,无人机飞行高度设定为650 m,升空后使用回形针航线对目标区进行扫描探测。试验中系统成功探测到了火点产生的烟雾,并做出报警提示,证明其已具备基本的林火探测能力(图4)。以图4显示的瞬间为例,系统在做出林火报警的同时,还给出了视场中心坐标为31.412408°N,104.78555°E,视场覆盖面积为929 m×654 m,地面人员可以据此结合烟柱的形状对火点位置和火势大小做出评估;同时综合考虑飞机的当前航向126度(飞机航向以正北为0度顺时针增加)和烟雾在影像中的扩散方向,可以得出火场的地面风向为东南。
2.5 作业流程
鉴于无人机飞行作业的复杂性,为提高效率、保证安全、规范操作,根据以往的飞行经验,并结合林火监测的特点,提出了应急状态下无人机林火监测系统的作业流程(图5)。
无人机林火监测系统设计的初衷是:以无人机为平台,结合视频设备,以较低的成本,实现部分航空护林的功能,尤其是在林火的早期探测和发展态势监测方面,为森林保护工作提供一种全新的、可长期业务化运行的技术装备。因此,在进入业务化运行之后,每个无人机监测站的作业流程将有所变化。首先,根据实地情况和业务需求拟定飞行周期、飞行航线和每次作业的飞行时间;之后由上级部门统一向航管部门完成整个巡护季节的空域使用申请;空域获得批准后,每个监测站只需在起飞前向航管部门确认后即可开始升空作业。在巡护飞行中,如发现林区异常情况或可疑目标,则控制无人机在目标区域上空进行监视飞行以进一步确认,防止火警误报。在确认有林火发生的情况下,立即向上级单位上报火警并提供参考定位信息。之后可根据情况滞留火场上空,进行发展态势监测,也可继续执行林区巡护飞行。

图5 无人机林火监测系统作业流程Figure5 Operation process of UAV forest-fire monitoring system
3 应用分析及存在问题
3.1 经济性分析
由于无人机系统的安全性不及常规有人机,且无人机在起降过程中存在损毁的可能,因此,系统的经济性分析以可能发生损毁的空中部分为重点。目前,一套起飞质量在10 kg左右的微型无人机系统的批量采购费用为5.0~10.0万元人民币,机体和飞行控制系统等组成的空中部分约为3.0万元。林火监测设备的购置成本约3.0万元,此价格不含数码相机及地面计算机,以采用3000.00元的数码相机为例,林火监测设备的机载部分约需3.0万元。以上合计,无人机林火监测系统的空中部分成本需6.0万元。以无人机可用起降次数为20次,飞行3 h·次-1计,作业成本为1000.00元·h-1。以飞行航高1000 m,镜头视角70(°),航速80 km·h-1计,无人机系统可覆盖的面积约为112 km2·h-1,单位面积成本8.90元。
有人机以目前较为常用的运12飞机为例,租用期间每日的台班费用约6000.00~7000.00元,停机、人员等费用另计,执行飞行作业的每小时机时费用约1.2万元。在其他条件相同的情况下,以航速300 km·h-1计,可覆盖的面积约为 420 km2·h-1,单位面积成本 28.60 元。
从上述对比中可见,就直接使用成本而言,无人机系统在两方面都具有较大优势。考虑到有人飞机的观察视角远大于70度,在回形针航线中两侧的观察范围更大,其单位面积成本会有所降低。但无人机系统的风险主要来自起降阶段,如能进一步延长系统的续航时间,提高巡航速度,则其单位时间和单位面积的使用成本都将大幅降低,且无人机在购置及保有成本方面的优势是普通飞机无法比拟的。
3.2 林火监测应用方式
中国空域并未开放,当前低空空域管理改革试点也刚刚开始,无人机飞行作业由于管理上的制约还无法大规模开展。而且无人机的民用化时间较短,受到平台本身安全性和性能的制约,无人机开展业务化的林火实时监测还不现实。就本研究所述的系统而言,选择一个林场进行试运行,与其他林火监测技术结合,作为应急手段,对林区可疑目标开展快速探测,在确认灾情发生后为林火扑救决策提供信息支持,是目前系统最可能发挥作用的方式。在此基础上,进一步改进性能,探索业务化运行的经验,以便为系统的推广应用做好准备。
3.3 其他应用可能
无人机林火监测系统在本质上是由无人机搭载摄像头构成的空中对地实时观测系统,因此,除了用于林火的探测,还可广泛用于森林管理的其他方面。如监测森林中的可燃物堆积情况,搭载温湿度传感器获取林区的气象资料,监测林区的可疑火源等。这些信息的加入将有效提高森林火险预测预报[13-14]服务的准确性。同时系统还可以用于林区的病虫害防治,林木生长状况监测,林木蓄积量估算,防止乱砍滥伐和林区生物资源调查等众多领域。
3.4 存在问题
就硬件设备而言,受经费的制约,系统的性能还有很大的提升空间。采用更高分辨率的摄像头和更好的无线数据链路将极大地提升系统的作业半径和影像的清晰度。目前,完成的小型两轴稳定云台,在飞行中地面不能对其进行实时控制,应用的灵活性也受到限制。
就软件系统而言,由于全部采用交互式数据语言开发,虽然图像处理效率较高,但该语言对于底层硬件和通信接口的管理能力不强,获取的视频帧率偏低,导致实时视频的连贯性较差。由于时间、经验的限制,计算机软件稳像技术(防抖)和基于清晰度的图像筛选技术没有加入到软件功能中,目前获取的视频截图清晰度和视觉效果有待提高。进一步开展图像信息的挖掘工作,如根据影像中烟柱的形状、方向和密度分布,准确推算火场的风速风向,确定火点位置等信息都是下一步可以探索的工作。
受无人机作业能力和林火突发性强、持续时间短等特点的制约,完整系统还没有在实际的林火监测中得到应用,系统在真实环境中的可靠性和表现有待检验。
无人机使用汽油发动机作为动力,在林区上空作业中如发生意外坠机等事故,其本身将有可能导致火情的发生。通过使用无刷电机和电池作为动力组合的无人机平台可以在一定程度上降低这种风险,但会导致系统的飞行时间大大减少,作业效率降低。如何提高无人机的安全可靠性和在意外情况下怎样避免飞机起火将成为决定无人机能否大规模用于林区作业的关键因素。
4 结束语
利用实时视频传输和计算机技术研制的无人机林火监测设备体积小、质量轻,设计功能独立完整,适应性好,可以搭载在目前几乎所有的中小型无人机上使用。利用基于颜色特征的烟雾自动识别技术,监测地面站在飞行中即可对视频数据进行处理,从而实现了对林区烟火的实时探测。
经试验证明:由无人机和监测设备构成的微型空中林火监测系统可实现航空护林的部分功能,具有良好的烟火探测能力,能够及时发现林区异常并做出报警提示,且运行成本低,操作简便,是一种全新的航空护林技术装备。微型无人机林火监测系统的进一步完善和推广应用,将有助于提高中国森林火情的监测、预警能力和森林安全管理工作的自动化、信息化水平。
[1]夏其表,李光辉,尹建新.渗透理论在森林火灾模拟系统中的仿真研究[J].浙江林学院学报,2009,26(2):233-238.XIA Qibiao,LI Guanghui,YIN Jianxin.Application of percolation theory in forest fire simulation [J].J Zhejiang ForColl,2009,26 (2):233 - 238.
[2]吴雪琼,秦先林,李程,等.我国林火监测体系现状分析[J].内蒙古林业调查设计,2010,33(3):69-72.WU Xueqiong,QIN Xianlin,LI Cheng,et al.Analysis of current forest fire monitoring system in China [J].Inner Mongolia For Inv Design,2010,33 (3):69 - 72.
[3]王彩云,扎西顿珠,陈涛.EOS/MODIS数据在西藏森林火灾中的应用[J].高原山地气象研究,2010,30(3):66-69.WANG Caiyun,ZHAXI Dunzhu,CHEN Tao.Application of EOS/MODIS data on the forest fire in Tibet[J].Plateau Mount Meteorol Res,2010,30 (3):66 - 69.
[4]熊文成,魏斌,孙中平,等.基于环境一号卫星B星CCD与红外相机融合的澳洲火灾监测[J].遥感技术与应用,2010,25(2):178- 182.XIONG Wencheng,WEI Bin,SUN Zhongping,et al.Australian forest fire disaster monitoring based on CCD and IRS data of HJ-1-B [J].Remote Sens Technol Appl,2010,25 (2):178 - 182.
[5]田晓瑞,张有慧,舒立福,等.林火研究综述(V)-航空护林[J].世界林业研究,2004,17(5):17-20.TIAN Xiaorui,ZHANG Youhui,SHU Lifu,et al.A summary of the development of air attack [J].World For Res,2004,17 (5):17 - 20.
[6]赵相瑜,袁继敏.基于图像分析的森林火灾监测系统[J].攀枝花学院学报,2010,27(3):44-47.ZHAO Xiangyu,YUAN Jimin.The monitoring system of forest fires based on image analysis [J].J Panzhihua Univ,2010,27 (3):44 - 47.
[7]王青山.简述无人机在遥感技术中的应用[J].测绘与空间地理信息,2010,33(3):100-101,104.WANG Qingshan.UAV applications in remote sensing technology [J].Geomatics&Spatial Inf Technol,2010,33(3):100 - 101,104.
[8]马舒庆,汪改,潘毅,等.微型探空飞机解析测风方法[J].大气科学,1999,23(3):377-384.MA Shuqing,WANG Gai,PAN Yi,et al.An analytical method for wind measurements by a mini-aircraft [J].Chin J Atmosph Sci,1999,23 (3):377 - 384.
[9]马瑞升,马舒庆,王利平,等.微型无人驾驶飞机火情监测系统及其初步试验[J].气象科技,2008,36(1):100-104.MA Ruisheng,MA Shuqing,WANG Liping,et al.Preliminary experiment of forest fire monitoring system on unmanned aerial vehicle [J].Meteorol Sci Technol,2008,36 (1):100 - 104.
[10]臧克,孙永华,李京,等.微型无人机遥感系统在汶川地震中的应用[J].自然灾害学报,2010,19(3):162-166.ZANG Ke,SUN Yonghua,LI Jing,et al.Application of miniature unmanned aerial vehicle remote sensing system to Wenchuan earthquake [J].J Nat Dis,2010,19 (3):162 - 166.
[11]饶裕平,方陆明,柴红玲.林火视频监控中烟识别方法的探讨[J].浙江林业科技,2009,29(2):58-62.RAO Yuping,FANG Luming,CHAI Hongling.Presentation of video smoke detection technique [J].J Zhejiang For Sci Technol,2009,29 (2):58 - 62.
[12]杨斌,马瑞升,何立,等.基于颜色特征的遥感图像中烟的识别方法[J].计算机工程,2009,35(7):168-169.YANG Bin,MA Ruisheng,HE Li,et al.Method of identifying fume in remote sensing images based on color features [J].Computer Eng,2009,35 (7):168 - 169.
[13]狄丽颖,孙仁义.中国森林火灾研究综述[J].灾害学,2007,22(4):118-123.DI Liying,SUN Renyi.Summarization of research on forest fire in china [J].J Catastroph,2007,22 (4):118 - 123.
[14]王正旺,庞转棠,魏建军,等.森林火险天气等级预测及火情监测应用[J].自然灾害学报,2006,15(5):154-161.WANG Zhengwang,PANG Zhuantang,WEI Jianjun,et al.Forecast of weather grade in forest fire risk and application of fire monitoring [J].J Nat Dis,2006,15 (5):154 - 161.
猜你喜欢
江苏安全生产(2022年11期)2023-01-11
山西林业(2021年2期)2021-07-21
特产研究(2021年2期)2021-04-13
小学阅读指南·低年级版(2021年3期)2021-03-19
黑龙江水利科技(2020年8期)2021-01-21
中国新闻周刊(2020年6期)2020-03-08
华人时刊(2019年13期)2019-11-26
当代陕西(2017年12期)2018-01-19
现代农业科技(2017年1期)2017-03-06
现代农业科技(2016年21期)2017-03-06
