CIE中间视觉光度学模型的分析和应用*
2012-05-28 01:01庄鹏
照明工程学报 2012年3期
庄 鹏
(厦门市产品质量监督检验院国家LED应用产品质量监督检验中心,福建厦门361004)
1 引言
在中间视觉区域,即暗视觉和明视觉之间的区域(亮度大约在0.001cd/m2~10cd/m2之间),人眼的视觉功能同时由杆体细胞和锥体细胞决定,光谱光视效率函数随着人眼适应亮度的变化而变化。因此如果对于所有亮度水平的光度测量,都还是采用明视觉光谱光视效率函数,将导致错误的评价结果。中间视觉照明包括道路照明、隧道照明、紧急照明、停车场照明、飞机场照明、仪表盘照明、航天驾驶舱照明、某些交通信号照明、军事照明、医疗照明和安保照明等。
中间视觉光度学几十年来一直是国际照明界关心的课题(CIE,1989,CIE,2001)。直到90年代中期,对于该领域的研究大多采用视亮度匹配法。CIE81—1989《中间视觉光度学:历史、特殊问题和解决方法》阐述了基于视亮度匹配法的中间视觉系统。CIE141—2001《光度学补充系统的测试》对原有系统进行更新,指出不可能采用一个单一的光度学模型来描述中间视觉的特性。对应不同的使用条件和亮度水平,应选择适当的光度学模型,才能对环境的照明效果进行合理的评价,达到有效照明、节能和保障安全的目的。
到90年代后期,基于视觉功能法的中间视觉光度学引起了国际照明界的重视(Goodman,1997,McGowan和Rea,1994)。该方法采用特定的视觉任务,通过测量人眼对视觉目标的察觉能力、辨别能力和反应时间,来确定光谱光视效率函数。视觉功能法比视亮度匹配法更为直接和实用。例如,在驾驶汽车时,人们并不需要对路面相邻区域的相对亮度进行视觉评估,更重要的是能够察觉和辨别处于视觉极限条件下的物体。我国学者一直活跃在中间视觉研究领域,在中间视觉的理论研究[1][2][3][4]和实际应用[5][6][7]中都取得了丰硕的成果,并参与了CIE191∶2010《基于视觉功效的中间视觉光度学推荐系统》的编制工作。
2010年,CIE191推荐了四种中间视觉光度学模型[8],但至今还没有文献对这些光度学模型进行过全面系统的分析,中间视觉光度量检测仪器也未面世,很多照明设计和应用者对中间视觉的概念仍然不清,更谈不上应用。本文对CIE191∶2010四种中间视觉模型的特点、适用范围和应用注意事项进行了全面系统的分析,并设计了中间视觉光度量测试仪器,能够测量明视觉和中间视觉下灯具的光度量和发光效率,使中间视觉模型在照明测量和设计中能够得到正确和有效的应用。
2 CIE 191—2010推荐的中间视觉模型
2.1 中间视觉模型简介
由于CIE光度学遵从相加性原理(CIE,1978),因此中间视觉光度学模型也应满足相加性原理。相加性原理指出,对于给定的光谱辐射量,通过适当的光谱光视效率函数进行加权后,在指定光谱范围内线性相加即可得到对应的光度量。因此,中间视觉光度系统必须满足两个约束条件:(1)相加性;(2)中间视觉的光谱光视效率函数随着亮度的增加趋向明视觉的光谱光视效率函数,随着亮度的降低趋向暗视觉的光谱光视效率函数。满足这些约束条件的中间视觉光度学模型的最简单形式是明、暗视觉光谱光视效率函数的线性组合,即:

其中x为亮度适应系数。
因为V(λ)和V'(λ)均满足相加性,因此式(1)定义的中间视觉光谱光视效率函数Vmes(λ)自然也满足相加性。图1为光谱光视效率函数(未归一化)随亮度的变化规律,由图可见:随着亮度的增加,光谱光视效率函数逐渐从暗视觉过渡到明视觉。由于中间视觉光谱光视效率函数依赖于人眼的亮度适应状态,因此相加性只在给定的亮度适应水平上成立。

图1 光谱光视效率函数
最近提出的两个基于视觉功能的中间视觉模型,即UPS模型(Rea et al.,2004)和MOVE模型(Goodman et al.,2007),均采用式(1)所示的形式将明视觉和暗视觉联系起来,并满足相加性原理。除了USP模型和MOVE模型之外,CIE还提出了中间模型(Intermediate system)。中间模型也采用式(1)所示的形式,且与MOVE模型一样,亮度适应系数和中间视觉亮度之间的关系为“对数-线性”关系,但调整了中间视觉区域的上、下极限。
2.2 USP模型
He等人(1997,1998)的研究工作奠定了USP模型的实验基础。1997年,He等人在高压钠灯和金卤灯的8种亮度水平下(0.003cd/m2~10cd/m2之间),测量了人眼的反应时间。实验条件为:目标对比度C=2.3;被测目标和背景的光谱功率分布一致,即视觉任务是只有亮度对比而没有彩色对比的非彩色刺激量。实验结果表明:当亮度高于0.6cd/m2时,杆体细胞对视觉任务的反应时间没有贡献。1998年,He等人采用两眼的反应时间差来测量中间视觉光谱光视效率函数,从而得到了计算中间视觉亮度的迭代方法。
2004年,Rea等人在He等人的研究基础上提出了USP光度学统一模型,形式如式(1)所示。USP模型的中间视觉亮度和亮度适应系数可由封闭形式的数学公式计算,中间视觉区域在0.001cd/m2~0.6cd/m2之间。
2.3 MOVE模型
MOVE模型(Eloholma等,2005,Goodman等,2007)是通过对夜间驾驶过程中的目标察觉能力、察觉速度和目标细节辨别能力的研究基础上提出的。视觉目标包括了彩色目标和非彩色目标。实验条件为:背景明视觉亮度0.01cd/m2、0.1 cd/m2、1 cd/m2和10 cd/m2(有些实验也采用0.3 cd/m2和3 cd/m2);目标偏心度为0°和10°;目标视场角2°(和0.29°);目标显示时间△t≥3s(在某些反应时间测量中采用△t≤500ms);对比度在临界值附近;使用半宽度为10nm的准单色光源和宽光谱光源;大多数实验的目标和背景采用不同的颜色(有色差条件),而某些实验的目标和背景采用相同的颜色(消色差条件);被测试者109位。
根据实验结果得出周边视力的中间视觉光度学模型(Goodman等,2007),形式如式(2)所示,与式(1)不同的之处是增加了使Vmes(λ)的最大值取1的归一化函数M(x)。MOVE模型的中间视觉亮度和亮度适应系数通过迭代方法计算得到,中间视觉区域在0.01cd/m2~10cd/m2之间。

2.4 中间模型
尽管采用USP模型和MOVE模型计算中间视觉亮度所得的结果有差异(特别是对于低亮度、高色饱和度的光源差异更大),但对于普通照明的大多数白色光源(如夜间的道路照明等),这些差异即使在所有亮度水平下也很小。在实际应用中,根据这两个模型得出的结果比较接近,它们之间的主要区别在于中间视觉与明视觉分界点的不同。MOVE模型的分界点被认为过高(Rea和Bullough,2007),而UPS模型的分界点被认为过低(Eloholma和Halonen,2006)。
USP模型和MOVE模型代表了两类极端情况。在USP模型中,只对反应时间进行测量,而不考虑颜色的影响,因此只适用于非彩色的视觉任务;在MOVE模型中考虑了更为广泛的视觉任务,由于不同视觉任务中人眼的彩色通道和非彩色通道的非线性交互作用,使得从暗视觉向明视觉的转换变得非常复杂,给测试结果引入了更多的不确定度。USP模型采用较少的观察者(3个)以减少“噪声”,而MOVE模型采用较多的观察者(109个)以减少观察者之间个体差异造成的影响。必须指出,尽管MOVE实验中包括了非彩色的与彩色的视觉任务,但以彩色视觉任务为主。在夜间驾驶等现实情况中,既包括了非彩色视觉任务也包括了彩色视觉任务,因此MOVE模型对非彩色视觉任务可能考虑不足。为了使模型具有更广泛的适用性,同时给予非彩色视觉任务更多的考虑,提出了介于USP模型和MOVE模型的中间模型,即MES1和MES2,形式也如式(2)所示。MES1模型的中间视觉区域为0.01cd/m2~3cd/m2,MES2模型为0.005cd/m2~5cd/m2。
在大多数情况下,MES2模型对实测数据的符合程度比MES1模型好,因此CIE推荐采用MES2模型作为基于视觉功能的中间视觉光度学的推荐模型,计算公式如下:

其中M(m2)为使中间视觉光谱光视效率函数Vmes(λ)的最大值为1的归一化函数;m2为亮度适应系数:如果Lmes≥5.0cd/m2,则m2=1;如果Lmes≤0.005cd/m2,则m2=0;如果0.005cd/m2<Lmes<5.0cd/m2,则m2=0.3334lg Lmes+0.7670;Lmes为中间视觉亮度,计算公式如下:

其中Lp为明视觉亮度;Ls为暗视觉亮度;V'(λ0)=683/1699,为暗视觉光谱光视效率函数在555nm处的值;n为迭代步数。
3 各种光度学模型的特点和适用范围
中间视觉亮度随着人眼亮度适应水平的不同而不同,图2为USP模型、MOVE模型、MES1模型和MES2模型计算的中间视觉亮度与明视觉亮度之差随明视觉亮度的变化规律(本文以亮度为例,事实上对于所有的光度量均有相同的规律),由图可见以下规律:
1) 在明视觉亮度Lp一定的情况下,中间视觉亮度Lmes随着S/P值(即暗视觉光通量与明视觉光通量之比)的增加而增加。当S/P=1时,Lmes与Lp始终保持一致;
2) 能量主要集中在短波段的光源(S/P>1,如LED),Lmes大于Lp;而能量主要集中在长波段的光源(S/P<1,如高压钠灯),Lmes小于Lp。可见,当明视觉亮度相同时,在中间视觉区域,人眼感觉金卤灯、LED灯比高压钠灯明亮;
3) Lmes与Lp之差绝对值的最大值,对于USP模型发生在Lp=0.2 cd/m2~0.3cd/m2,对于MOVE模型发生在Lp=4 cd/m2~5 cd/m2,对于MES1模型发生在Lp≈1 cd/m2,对于MES2模型发生在Lp=1 cd/m2~2 cd/m2;
4) MOVE模型在S/P=0.25且Lp=0.035cd/m2时、MES1模型在S/P=0.25且Lp=0.039 cd/m2时、MES2模型在S/P=0.25且Lp=0.019cd/m2时,Lmes的变化不平滑,这是因为当S/P值较小且亮度较低时,通过中间视觉模型的迭代公式计算的亮度适应系数为负数,在实际情况下不能使用,应令其为0,从而使Lmes的计算结果发生“突然”变化。可见,在编写这三种模型的中间视觉应用程序时,应保证亮度适应系数不能为负数。
5) 对于不同的S/P值,MOVE模型在中间视觉区域上界(Lp=10 cd/m2)的Lmes值差异较大,这表明在亮度较高区域,MOVE模型准确度较低。
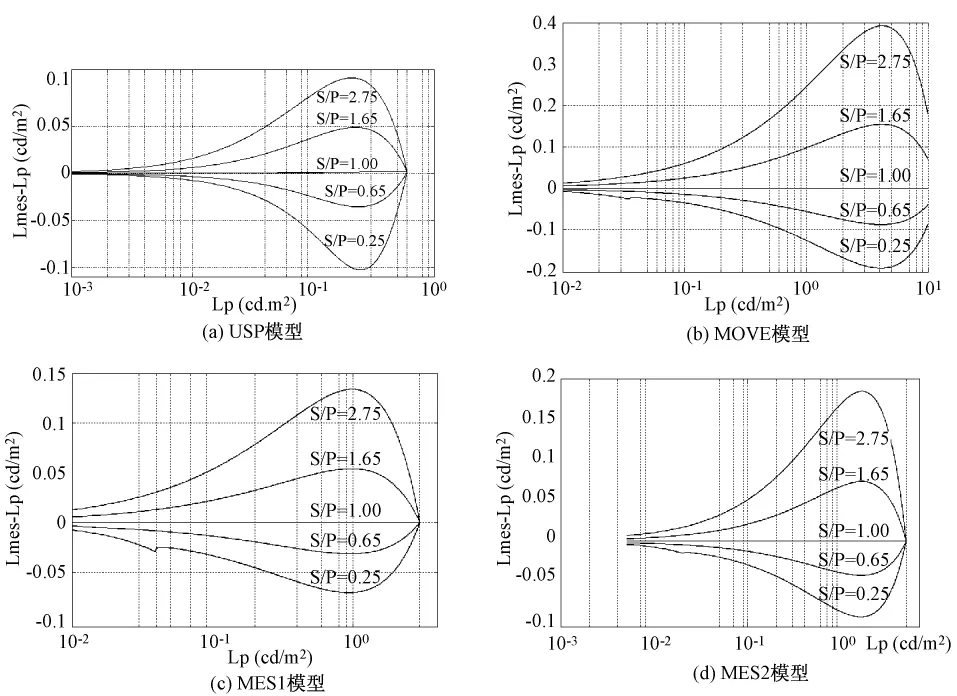
图2 中间视觉与明视觉亮度差的变化规律
随着亮度的减小,采用中间视觉模型的计算结果与明视觉的差异变大。例如,对于S/P值为0.65的高压钠灯和S/P值为2.5的金卤灯,其中间视觉亮度相对明视觉亮度的变化率随着亮度的减小而变大,由图3可见:MOVE模型、MES1模型和MES2模型的变化规律非常相似,而USP模型与其他三个模型的差异较大。目前,大多数应用于道路照明的光源其S/P值在0.65和2.5之间,采用中间视觉光谱光视效率函数与采用明视觉光谱光视效率函数的计算结果具有较明显的差别。以MES2模型为例,在明视觉亮度为1 cd/m2的情况下,当光源的S/P值在0.65和2.5之间变化时,中间视觉模型的计算结果与明视觉相比,会有-4%至+15%的变化;在0.3 cd/m2的亮度下,变化范围扩大到-8%至+29%。
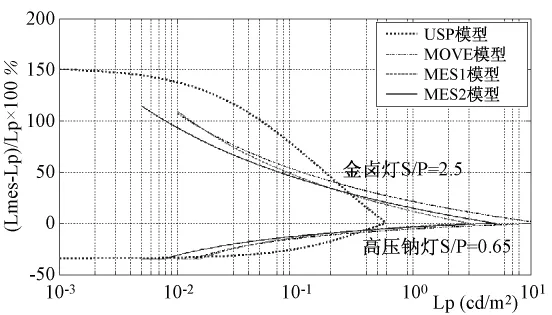
图3 中间视觉亮度相对明视觉亮度的变化率
没有一个光度学模型能够完全描述人眼视觉系统复杂的交互作用,对于不同的视觉任务和亮度水平,四种中间视觉光度学模型对于实测数据的符合程度是不同的:1)USP模型最符合低亮度水平下非彩色视觉任务的测试结果;2)MOVE模型、MES1模型和MES2模型最符合较高亮度水平下非彩色视觉任务的测试结果;3)MOVE模型最符合彩色视觉任务的测试结果;4)MES1模型和MES2模型对于彩色视觉任务测试结果的符合程度比MOVE模型略差,但这些差别相比于心理物理量所固有的不确定度可以忽略。
中间视觉推荐模型MES2的建立是基于周边视觉条件的,在该条件下杆体细胞和锥体细胞对视觉响应均有影响。但对于视场角小于2°的线上视觉,明视觉的光谱光视效率函数V(λ)适用于所有的亮度水平。在进行道路照明设计时,应注意到视觉功能会随着目标偏移度的变化而变化,当需要同时处理线上视觉和周边视觉的信息时,应根据不同情况制定相应的评价标准。此外,当视觉目标色饱和度很高或光谱功率分布很窄时(S/P值很高或很低),推荐模型与实际的视觉状况并不相符。
4 中间视觉光度量测量仪器的设计和测量结果分析
中间视觉光谱光视效率函数随着人眼适应亮度的不同而不同,中间视觉光度量只能通过光源的光谱功率分布与相应光谱光视效率函数的加权积分得到。为此研制了基于CCD光谱辐射度计的中间视觉光度量测试仪器,具有波长校准、光谱辐射度校准、光通量校准和自吸收系数校准等功能,除了能够测量四种光度学模型下的中间视觉光度量外,还能够测量明视觉光度量、暗视觉光度量,以及色坐标、色温和显色指数等色度学参数。
采用该仪器测量了标称功率为150W的高压钠灯(S/P=0.77)、金卤灯(S/P=1.43)和LED灯(S/P=1.71),其明视觉、暗视觉光通量及中间视觉光通量随明视觉亮度的变化规律如图4、图5、图6所示。由图可见:
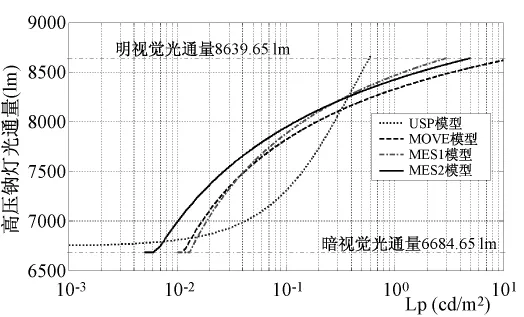
图4 中间视觉区域高压钠灯光通量随Lp的变化关系

图5 中间视觉区域金卤灯光通量随Lp的变化关系

图6 中间视觉区域LED灯光通量随Lp的变化关系
1) 在中间视觉区域,对于S/P<1的光源,中间视觉光通量随Lp的减小而减小,对于S/P>1的光源,中间视觉光通量随Lp的减小而增大。这表明当明视觉光效相同时,S/P值越大的光源,其中间视觉光效就越高,且随着适应亮度的降低,光效优势越明显;
2) MOVE模型、MES1模型和MES2模型测量得到的光通量随Lp的变化曲线的模式基本一致,特别是MOVE模型和MES2模型的曲线基本平行,但USP模型的曲线与其他三者差别较大;
3) 在中间视觉的下界,USP模型测量的中间视觉光通量与暗视觉光通量最为接近,其次分别是MES2模型、MES1模型和MOVE模型。在中间视觉上界,MES2模型测量的中间视觉光通量与明视觉光通量最为接近,其次分别是MES1模型、USP模型和MOVE模型。但应注意到一类特殊情况:当S/P值较小且亮度较低时,通过中间视觉模型的迭代公式计算的亮度适应系数为负数,需令其为0,从而使下界点上的Vmes(λ)与V'(λ)完全一致,因此在下界点上的中间视觉光通量就与暗视觉光通量完全相等,但这并不表明这三种模型在低亮度水平下的测量精度最高。四种光度学模型在下界点和上界点的中间视觉光通量及其与暗视觉和明视觉光通量的相对误差如表1和表2所示;
4) 由测量曲线的连续性可以推出,USP模型在低亮度水平下测量精度最高,MES2模型在高亮度水平下测量精度最高,MES2模型在中间视觉区域的所有亮度水平下的综合测量精度最高,这也是CIE选择MES2模型作为推荐模型的原因之一。

表1 中间视觉下界点的光通量与暗视觉光通量的相对误差

表2 中间视觉上界点的光通量与明视觉光通量的相对误差
5 结论
CIE在考虑相加性及与明、暗视觉衔接性的基础上提出了四种中间视觉光度学模型,其中USP模型只适用于非彩色视觉任务,而MOVE模型以彩色视觉任务为主,它们代表了视觉任务的两类极端情况。UPS模型的中间视觉与明、暗视觉分界点被认为过低,而MOVE模型的分界点被认为过高,为了使模型具有更广泛的适用性,同时给予非彩色视觉任务更多的考虑,CIE提出了中间模型MES1和MES2,并将MES2模型作为基于视觉功能的中间视觉光度学推荐模型。本文通过理论分析和实际测量,得出如下结论:
1)四种光度学模型的中间视觉区域各不相同。在低亮度区域,USP模型精度最高,在高亮度区域,MES2模型精度最高,在整个中间视觉区域,MES2模型的综合精度最高,应根据具体的视觉任务选择合适的模型以提高测量精度;
2)当光源的S/P值较小且亮度较低时,MOVE模型、MES1模型和MES2模型计算的亮度适应系数为负数,在实际情况下不能使用,应令其为0。在编制这三种模型的中间视觉光度量计算程序时,应注意对亮度适应系数进行判断,并作出相应的处理;
3)亮度越小,中间视觉模型的测量结果与明视觉的差别越大,如果采用明视觉模型评价中间视觉照明质量,将导致错误的结果;
4)在中间视觉区域,能量主要集中在短波段的光源比能量主要集中在长波段的光源具有更高的发光效能。
[1]陈仲林,杨春宇,何正军.光谱光视效能最大值研究[J].照明工程学报,2003,14(3):1~3.
[2]陈仲林,杨春宇,何正军.中间视觉函数表达式的研究[J].照明工程学报,2003,14(4):1~6.
[3]林燕丹.中间视觉状态下人眼视觉功能的光谱响应特性研究[D].复旦大学2004年10月.
[4]胡英奎,陈仲林,杨春宇,等.改进的中间视觉光度学模型[J].灯与照明,2009,33(4):1~2,19.
[5]杨春宇,胡英奎,陈仲林.用中间视觉理论研究道路照明节能[J].照明工程学报,2008,19(4):44~47.
[6]杨春宇,李毅,陈仲林,等.道路照明节能设计中的中间视觉评价方法[J].照明工程学报,2009,20(4):19~22.
[7]金鹏,喻春雨,周奇峰,等.LED在道路照明中的光效优势[J].光学精密工程,2011,19(1):51~55.
[8]CIE 191∶2010 technical report“Recommended system for mesopic photometry based on visual performance”.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
家庭影院技术(2021年6期)2021-07-28
空间科学学报(2021年1期)2021-05-22
照明工程学报(2019年2期)2019-05-21
摄影之友(影像视觉)(2019年3期)2019-03-30
汽车实用技术(2018年16期)2018-09-06
时代汽车(2018年3期)2018-06-01
小天使·六年级语数英综合(2017年5期)2017-05-27
浙江大学学报(工学版)(2015年1期)2015-03-01
航天返回与遥感(2014年4期)2014-07-31