
基于变结构控制理论的反鱼雷鱼雷纵向运动控制建模与仿真
2012-05-27 12:45:56张西勇王树宗李宗吉
水下无人系统学报 2012年2期
张西勇, 王树宗, 李宗吉
基于变结构控制理论的反鱼雷鱼雷纵向运动控制建模与仿真
张西勇, 王树宗, 李宗吉
(海军工程大学 兵器新技术应用研究所, 湖北 武汉, 430033)
研究了变结构控制技术在反鱼雷鱼雷(ATT)纵向运动控制中的应用, 建立了鱼雷航行纵向运动数学模型与变结构控制模型。仿真分析可知, 该控制系统具有很好的动态特性, 对模型参数具有高鲁棒性、系统稳定性及很强的抗干扰能力。研究结果表明, 采用变结构控制方法能解决反鱼雷鱼雷纵向运动控制中存在的参数不确定和抗干扰问题。
反鱼雷鱼雷; 变结构控制; 纵向运动控制; 抗干扰能力; 仿真
0 引言
随着科学技术的发展, 鱼雷武器正朝着远航程、精确制导、高速度及智能化方向发展。相应各国的反鱼雷技术也在快速发展, 其中, 反鱼雷鱼雷(anti-torpedo torpedo, ATT)已成为各国研究的热点[1-2]。ATT具有灵活、机动、主动等优点, 通过ATT主动攻击来袭鱼雷, 能有效解决舰艇被鱼雷攻击的问题。ATT相比常规鱼雷, 具有攻击高速小目标、反应速度快及旋回角大等特点, 这就对其控制系统及弹道设计提出了更高要求。ATT在增强机动性的同时, 控制系统的稳定性必然降低, 这是因在高速和高旋回角状态及复杂水文条件下, ATT模型参数发生较大变化从而导致系统失稳所致。而变结构控制器具有响应速度快, 对模型参数具有高鲁棒性, 系统稳定性对模型参数不敏感等特点。本文采用变结构控制器对ATT纵向运动控制系统进行设计, 并进行了仿真研究。
1 系统建模
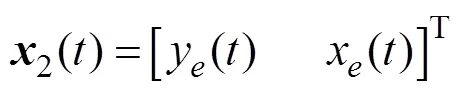
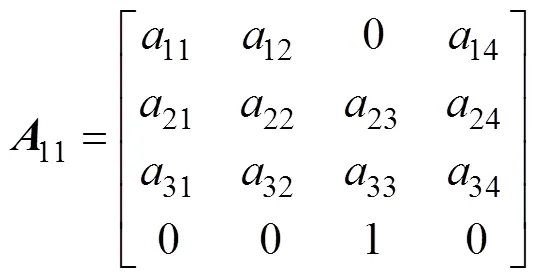
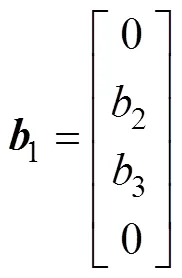
1.1 ATT纵向运动模型
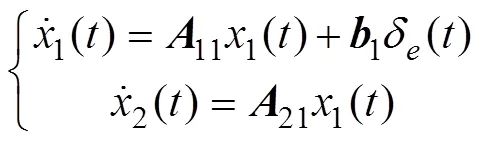
其中


1.2 ATT纵向运动变结构控制模型



故1=0稳定, 从而在上述变结构控制律下, 系统实现滑动模运动。
2 仿真分析
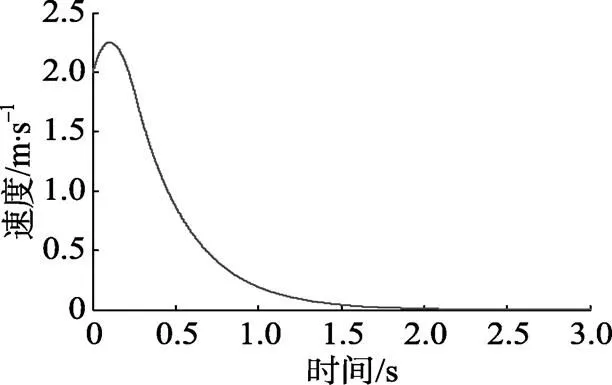
图1 鱼雷速度过渡曲线
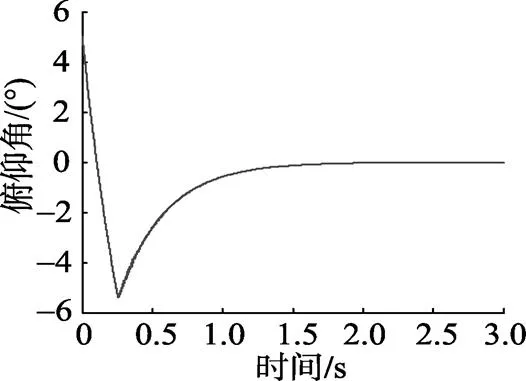
图2 鱼雷俯仰角过渡曲线
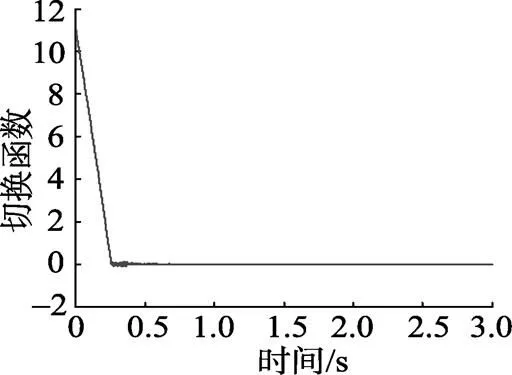
图3 滑模超平面过渡曲线
图4 控制输入(横舵角)曲线
从仿真结果知, 俯仰角过渡时间不到1 s, 变结构控制系统存在的固有颤振也很小, 图中, 在0.3 s附近存在较小的颤振, 这在工程上是可以接受的。
从仿真结果可知(见图5~图8), 变结构控制模型对系统的随机干扰具有很好的鲁棒性, 系统参数的变化不影响系统稳定性, 这一可贵特性对鱼雷的控制非常有利。鱼雷处于复杂的水文条件下, 存在众多未知干扰(如海流变化, 漩涡等) , 传统的控制方法已不能满足要求, 变结构控制系统可排除这些未知干扰控制鱼雷以预定弹道航行。
图5 鱼雷速度过渡曲线(加干扰)
图6 鱼雷俯仰角过渡曲线(加干扰)
图7 滑模超平面过渡曲线(加干扰)
3 结论
本文建立了鱼雷纵向运动数学模型, 并以变结构控制建立了鱼雷纵向运动的控制模型, 从仿真结果可知:变结构控制模型能满足鱼雷航行的动态特性; 对系统干扰具有很强的鲁棒性; 具有处理不精确模型的能力。可以看出, 变结构控制适合在鱼雷尤其是反鱼雷鱼雷上的运用。相比常规鱼雷, 反鱼雷鱼雷具有更强的机动性和高速度, 在复杂水下环境中, 未知因素众多, 传统控制方法已不能满足要求。变结构控制具有对模型参数不敏感和抗干扰特性。因此, 其有望将ATT的动力性能和机动性能达到或接近最大, 显著提高ATT的拦截性能。
图8 控制输入(横舵角)曲线(加干扰)
[1] 高剑, 徐德民, 潘瑛. 鱼雷纵向运动的非线性自适应滑模控制[J]. 弹箭与制导学报, 2005, 25(3): 155-157. Gao Jian, Xu De-min, Pan Ying. Nonlinear Adaptive Sliding- Mode Controller for the Longitudinal Control of the Torpedo [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2005, 25(3): 155-157.
[2] 高璇, 周徐昌, 沈建森, 等. 基于BTT的反鱼雷鱼雷横向-横滚操纵性研究[J]. 舰船科学技术, 2011, 33(5): 94-97.
Gao Xuan, Zhou Xu-chang, Shen Jian-shen, et al. Research on Roll Maneuverability of ATT Based on BTT[J]. Ship Scienceand Technology, 2011, 33(5): 94-97.
[3] 徐德民. 鱼雷自动控制系统[M]. 西安: 西北工业大学出版社, 2000.
[4] 胡跃明, 周其节. 分布参数变结构控制系统[M]. 北京: 国防工业出版社, 1996.
[5] 刘宇. 基于变结构控制的反鱼雷武器导引律[J]. 火力与指挥控制, 2010, 35(10): 87-90. Liu Yu. Anti-torpedo Weapon Guidance Law based on Variable Structure Control[J]. Fire Control & Command Control, 2010, 35(10): 87-90.
[6] 董翔宇, 任利, 刘云飞, 等. BTT导弹变结构自适应控制仿真研究[J]. 计算机仿真, 2009, 26(11): 65-68. Dong Xiang-yu, Ren Li, Liu Yun-fei, et al. Simulation of BTT Missile based on Variable Structure Adaptive Con- trol[J]. Computer Simulation, 2009, 26(11): 65-68.
Modeling and Simulation of Longitudinal Movement Control for Anti-torpedo Torpedo Based on Variable Structure Control
ZHANG Xi-yong, WANG Shu-zong, LI Zong-ji
(Research Institute of New Weaponry Technology and Application, Navy University of Engineering, Wuhan 430033, China)
This paper addresses the application of variable structure control technology to control of anti-torpedo torpedo, and establishes a mathematical model and a controlling model of torpedo′s longitudinal movement. Simulation analysis shows that the control system has good dynamic characteristic, high robustness and system stability, and strong anti-interference capacity. Conclusion is drawn that variable structure control technology can resolve parameter's uncertainty and anti-interference problems existing in longitudinal movement control of anti-torpedo torpedo.
anti-torpedo torpedo(ATT); variable structure control; longitudinal movement control; anti-interference capacity; simulation
TJ630.33
A
1673-1948(2012)02-0117-03
2011-06-24;
2011-08-18.
张西勇(1978-), 男, 在读博士, 主要从事反鱼雷鱼雷的控制技术研究.
(责任编辑: 杨力军)
猜你喜欢
小学生学习指导(小军迷联盟)(2023年3期)2023-03-27 09:22:30
小哥白尼(军事科学)(2021年8期)2021-11-22 07:58:22
广州文博(2020年0期)2020-06-09 05:15:44
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
项目管理技术(2016年12期)2016-06-15 20:29:33
兽医导刊(2016年6期)2016-05-17 03:50:15
中国民族医药杂志(2016年2期)2016-05-14 07:12:00
中国民族医药杂志(2016年4期)2016-05-09 07:41:15
