
基于以太网的鱼雷声光复合制导全弹道仿真平台构建
2012-05-27 12:45万亚民
水下无人系统学报 2012年2期
李 斌, 郑 为, 万亚民
基于以太网的鱼雷声光复合制导全弹道仿真平台构建
李 斌, 郑 为, 万亚民
(中国船舶重工集团公司第705研究所, 陕西 西安, 710075)
光纤线导+声尾流制导的复合制导方式能够较好地克服单一制导方式的缺点, 提高鱼雷武器在复杂水声物理场环境中对目标的探测距离和导引精度。本文研究了鱼雷射前流程, 作战态势, 线导方法以及舰船尾流模型和尾流自导检测模型等内容, 完成了基于以太网的鱼雷线导+尾流制导全弹道仿真平台构建, 为下一步半实物鱼雷全弹道仿真平台构建提供技术支撑, 可以支持完成复合制导鱼雷的使用方法和性能评价等一系列研究工作。
鱼雷; 声光复合制导; 全弹道; 以太网; 半实物仿真; 仿真平台构建
0 引言
鱼雷是目前主要的水下制导武器, 而鱼雷自导探测距离有限, 对远距离的目标探测无能为力。为了提高鱼雷对目标的探测距离和导引精度, 当前国内外普遍采取了几种导引方法相互结合的复合制导方式, 如在远距离通过发射艇探测目标并对鱼雷进行线导导引, 鱼雷靠近目标时利用本身自导系统进行反舰声尾流和反潜主/被动声自导等复合制导方式[1]。尾流自导的独特性使其已成为现代鱼雷反舰的重要方法[2], 目前各国都在积极研究尾流自导技术, 特别是声尾流自导技术。此外, 也在探索将光尾流[3]、旁视声纳等目标探测手段应用于鱼雷。
本文设计了一种光纤线导+声尾流复合制导数学仿真系统、研究了声尾流仿真模型及算法, 并且基于开发的光纤线导+声尾流复合制导数学仿真系统, 开展设定作战态势下的数学仿真试验, 为进行全弹道优化和作战效能评估提供条件。
1 仿真模型
在光纤线导+声尾流复合制导数学仿真中, 完成从发现目标到实现攻击的全过程。在发现初期, 根据相对态势进行射击诸元解算并对鱼雷进行相关参数设定。下面对复合制导中使用的线导和尾流模型及算法进行说明。
1.1 线导算法
为了验证复合制导弹道, 本系统实现了包括前置角导引, 追踪导引和方位导引等多种导引算法。其中现在方位导引法是利用目标的现在方位信息对鱼雷进行导引的方法, 它将鱼雷或其自导扇面形心导引到现在时刻的潜艇与目标方位线上, 即在经过一段时间间隔Δ后, 使鱼雷处于潜艇与目标方位线上。该导引方法适用于综合声纳远距离发现并跟踪目标, 且尚不知目标运动要素时采用, 具有自动适应目标变向变速机动的能力, 是对抗条件下最为实用也是惟一可行的导引方法[4]。
1.2 尾流模型及检测算法
尾流自导鱼雷是通过利用水面舰船尾流的一些物理特性来进行搜索、发现并导引跟踪目标舰船, 因此, 进行尾流自导鱼雷弹道逻辑仿真, 首先应该对水面舰船的尾流进行仿真。目前尾流模型已有相关研究, 建立了尾流生成模型[5]。
目前针对尾流检测的数学仿真都是基于概率模型的, 不符合鱼雷的检测原理, 本文通过进行主动声脉冲舰船尾流回波声压进行计算[6]。舰艇尾流中存在大量气泡, 对主动声脉冲具有散射特性, 尾流回波信号就是由尾流中大量气泡对声波的散射产生的。根据声波在气泡层中散射的能量学理论, 类似于海面混响散射理论处理, 防御系统接收到的尾流回波信号的声压可采用以下模型计算。
采用将尾流声压计算结果作为包络与载频相乘的方法生成尾流回波信号。

尾流自导检测模型和尾流自导弹道参考鱼雷设计相关理论完成算法设计。
2 鱼雷光纤线导+声尾流复合制导数学仿真系统设计与实现
根据上述理论和算法设计了鱼雷光纤线导+声尾流复合制导数学仿真系统, 构建该仿真平台以用于完成对声尾流仿真算法的验证, 对尾流检测算法和自导弹道进行研究, 并且最为重要的是对鱼雷的复合制导使用提供理论和仿真支持, 为进一步进行半实物仿真试验提供支撑。
2.1 系统构成
光纤线导+声尾流复合制导数学仿真系统的总体构架如图1所示, 该系统由光纤线导模拟器计算机、主动声尾流模拟器计算机、程控光纤信道模拟器、3D视景子系统等设备组成。光纤线导+声尾流复合制导数学仿真系统数据流框图如2所示。光纤线导数学仿真软件运行在光纤线导模拟器上, 主动声尾流自导数学仿真软件运行在主动声尾流模拟器上, 3D视景仿真软件运行在复合制导数学仿真3D视景子系统上。其中, 主动声尾流自导数学仿真软件由3个主要功能模块组成, 分别为线导+尾流复合制导鱼雷模拟器模块和尾流声压生成及检测模拟模块, 本艇、目标运动及目标尾流生成模块。
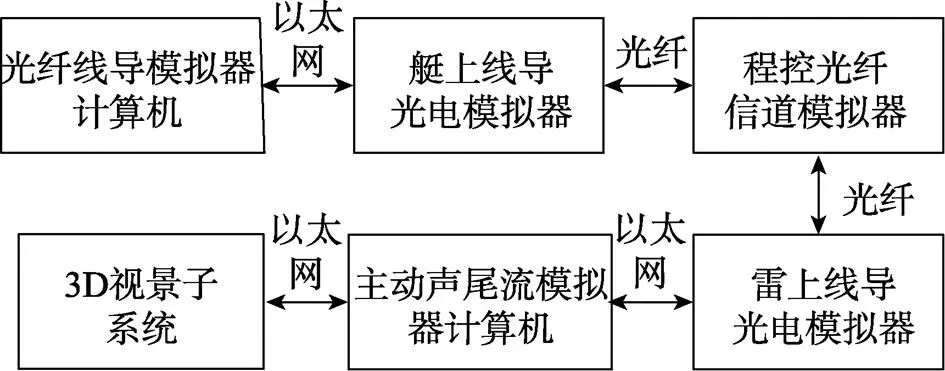
图1 光纤线导+声尾流复合制导数学仿真系统硬件连接框图
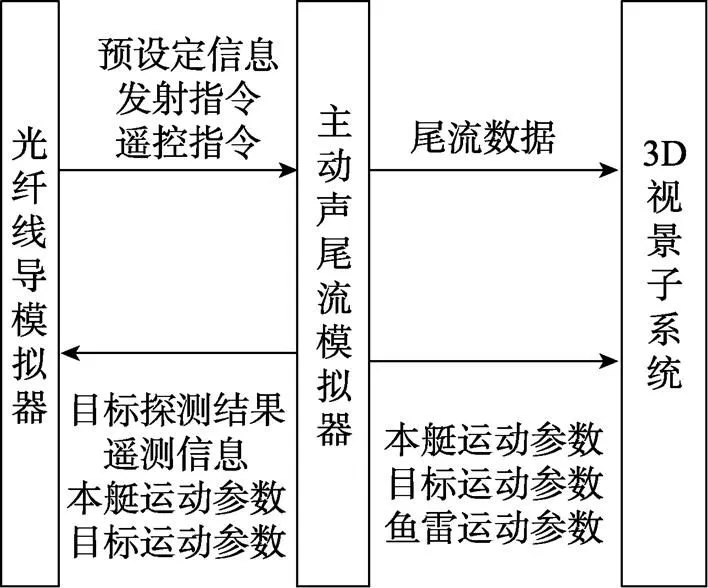
图2 光纤线导+声尾流复合制导数学仿真系统数据流框图
2.2 工作流程
数学仿真试验的过程包括射前准备阶段、初始机动阶段、线导导引阶段、尾流自导导引及攻击阶段、停止阶段。
1) 射前准备阶段。光纤线导模拟器接收到模拟观通发送的目标预警信号, 根据预警信号完成射击诸元解算, 进行鱼雷导航参数及预设定等初始参数装订, 产生鱼雷发射指令, 传给主动声尾流模拟器, 在仿真系统中提供鱼雷运动的仿真开始标志及时间同步指令。
2) 鱼雷初始机动阶段。鱼雷发射后, 主动声尾流自导数学仿真软件完成预定程序弹道的模拟。
3) 线导导引阶段。主动声尾流自导数学仿真软件形成遥测信息发送给光纤线导模拟器, 同时计算本艇运动、目标运动并送给光纤线导模拟器;光纤线导模拟器计算遥控指令并发送给主动声尾流自导数学仿真软件; 主动声尾流自导数学仿真软件根据遥控指令计算舵机模型、雷体模型后, 产生鱼雷姿态、角速率及深度信息并驱动鱼雷运动模型运动。试验过程中, 当主动声尾流自导数学仿真软件收到“自导开机”的遥控指令或到达自导开机距离时, 鱼雷转入尾流自导导引及攻击过程。
4) 尾流自导导引及攻击阶段。主动声尾流自导数学仿真软件根据自身解算的鱼雷和目标的运动参数, 并按照声尾流计算模型及有关设定参数, 计算水声物理场数学模型, 生成目标/背景的声压信号; 主动声尾流自导数学仿真软件分析各通道尾流声压信号, 根据策略生成控制指令, 控制鱼雷沿尾流跟踪攻击目标。
5) 停止阶段。正常停机; 由光纤线导模拟器发送“仿真停止”指令, 主动声尾流模拟器接收到仿真停止指令后, 停止鱼雷和目标运动模拟, 停止仿真; 紧急停止: 由主动声尾流自导数学仿真软件直接发出“仿真停止”指令, 停止解算。3D视景仿真软件在仿真试验过程中实时接收主动声尾流自导数学仿真软件发送的鱼雷运动、目标运动、本艇运动参数, 以及鱼雷检测结果, 用3D图像方式显示试验过程, 同时显示和记录有关仿真数据。
2.3 鱼雷光纤线导+声尾流复合制导数学仿真系统实现
光纤线导数学仿真软件运行在光纤线导模拟器上, 其发控主界面如图3所示。在仿真过程中该仿真软件根据接收到的本艇和目标相对态势, 模拟鱼雷射前预设定及发射过程, 开展线导导引, 根据鱼雷回馈的遥测信息, 按周期产生和发送遥控指令, 最终将鱼雷导引到最佳作战位置, 并可对试验中的遥控和遥测参数进行实时显示和记录、动态绘制实时鱼雷、目标以及本艇的仿真曲线等。
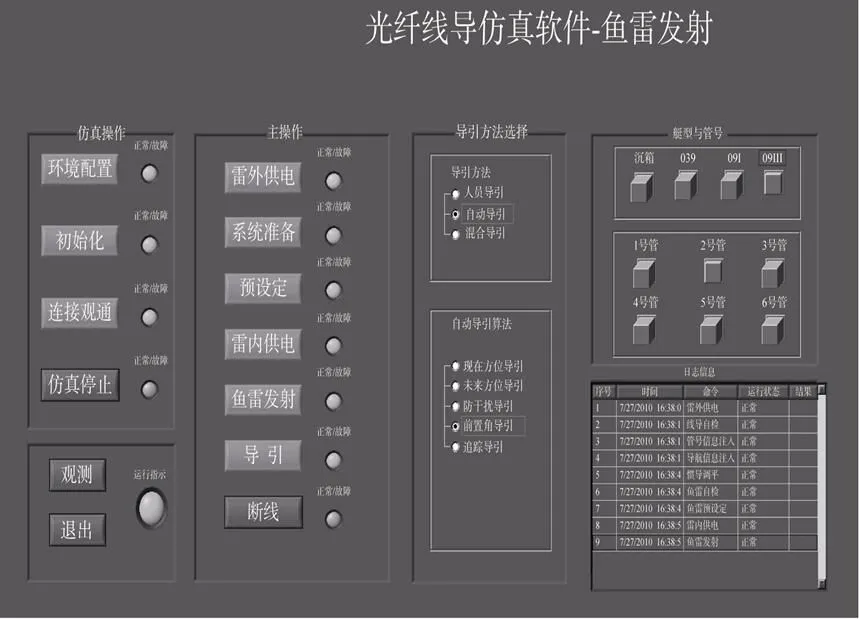
图3 光纤线导数学仿真软件
主动声尾流自导数学仿真软件运行在主动声尾流模拟器上, 其运行主界面如图4所示。其在仿真试验过程中实时解算鱼雷运动、目标运动、本艇运动、以及鱼雷、目标和本艇三者之间的相对运动关系, 并根据相对位置关系形成尾流回波信号, 传递给相应功能模块完成目标检测, 实施相应弹道逻辑, 同时记录有关参数的仿真结果。
2.4 试验结果与分析
设置典型鱼雷-本艇-目标对抗工况, 应用该数学仿真系统进行数学仿真试验。首先通过光纤线导遥控鱼雷进入尾流, 然后利用声尾流自导检测舰船尾流, 依据尾流弹道导引鱼雷跟踪目标, 水平弹道曲线如图5所示, 其中尾流采用声压生成模型完成自导回波信号仿真, 并完成目标检测, 自导声尾流回波信号时域特性如图6所示。结合3D视景仿真软件后攻击态势图如图7所示。
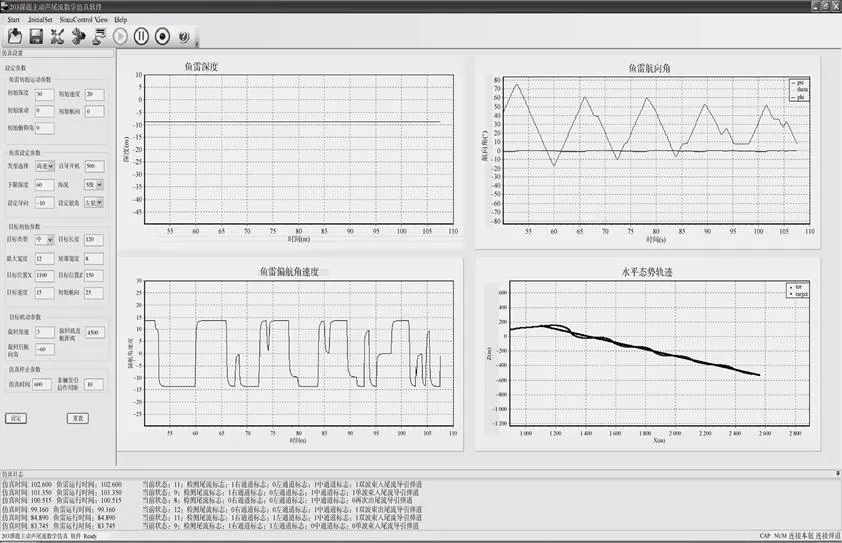
图4 主动声尾流自导数学仿真软件
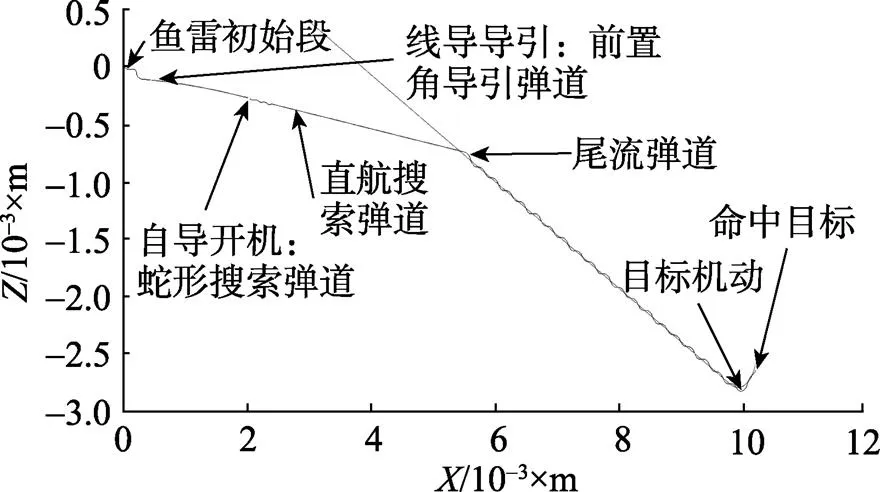
图5 复合制导仿真鱼雷水平弹道曲线
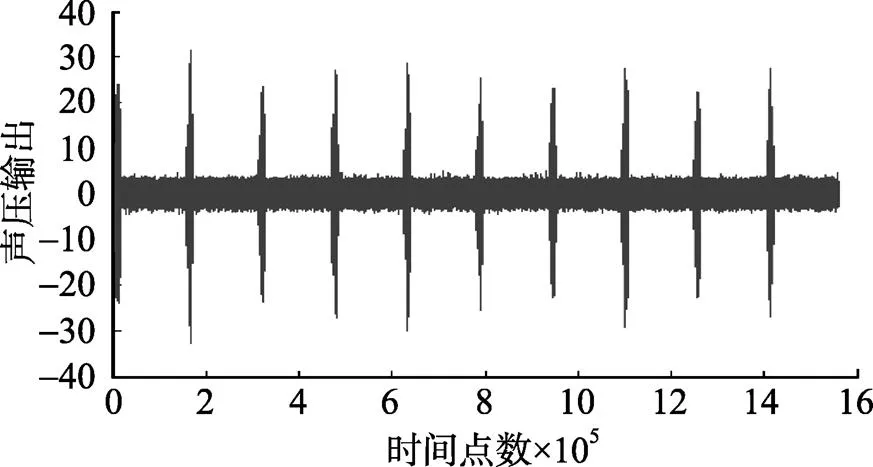
图6 尾流回波信号时域图
3 结束语
本文开展了光纤线导+声尾流复合制导仿真机理和方法研究, 开发了光纤线导数学仿真软件和主动声尾流自导仿真软件, 实现了鱼雷发控流程以及尾流回波信号生成方法。通过开展系列典型工况条件下的数学仿真试验, 验证了鱼雷光纤线导+声尾流复合制导仿真关键技术包括仿真模型和算法、软件及数学仿真系统的正确性, 结果表明, 该数学仿真系统的功能和性能指标能够满足鱼雷复合制导数学仿真试验要求, 可用于进行光纤线导鱼雷使用方法、线导导引算法和尾流搜索弹道等方面的研究。
[1] 蒋贤芬, 张静远, 刘文远. 线导+尾流自导鱼雷射击阵位仿真研究[J]. 鱼雷技术, 2008, 16(6) : 57-62. Jiang Xian-fen, Zhang Jing-yuan, Liu Wen-yuan. Simula- tion of Fire Position for Wire Guiding and Wake Homing Torpedo[J]. Torpedo Technology, 2008, 16(6): 57-62.
[2] 罗笛, 李本昌, 李原. 尾流自导鱼雷技术优势及应用局限性[J]. 鱼雷技术, 2008, 16 (3): 45-48.Luo Di, Li Ben-chang, Li Yuan. Technological Advantages and Application Limitations of Wake Homing Torpedo[J]. Torpedo Technology, 2008, 16 (3): 45-48.
[3] 冀邦杰. 光尾流自导中抗干扰技术研究[J]. 鱼雷技术, 2007, 15(1): 17-19.
Ji Bang-jie. Study of Anti-interference Technology in Laser Wake Detection[J]. Torpedo Technology, 2007, 15(1): 17-19.
[4] 杨大伟, 张培培. 线导鱼雷导引方法综述[J]. 舰船科学技术, 2010, 32(10): 140-143. Yang Da-wei, Zhang Pei-pei. Guidance Methods for the Wire-guidance Torpedo[J]. Ship Science and Technology, 2010, 32(10): 140-143.
[5] 赵向涛, 孙续文, 周明. 尾流自导鱼雷弹道逻辑仿真[J]. 鱼雷技术, 2009, 17(2): 40-44. Zhao Xiang-tao, Sun Xu-wen, Zhou Ming. Simulation of Trajectory Logic for Wake Homing Torpedo[J]. Torpedo Technology, 2009, 17(2): 40-44.
[6] 刘大亮, 董春鹏, 张西建, 等. 声尾流自导系统接收信号模型研究[J]. 鱼雷技术, 2006, 14(3): 36-39. Liu Da-liang, Dong Chun-peng, Zhang Xi-jian, et al. Research on Receiving Signal Model for Acoustic Wake Homing System[J]. Torpedo Technology, 2006, 14(3): 36-39.
An Acoustic-Optical Compound Guidance Simulation Platform for Complete Trajectory of Torpedo Based on Ethernet
LI Bin, ZHENG Wei, WAN Ya-min
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
Using acoustic-optical compound guidance mode can improve the target detection range and guidance precision of a torpedo in complex underwater acoustic field, compared with the conventional single guidance mode. We researched the process before firing a torpedo, the operational posture, the wire guidance method, the ship wake model, and the model for wake homing test, and constructed an acoustic-optical compound guidancesimulation platform for complete trajectory of a torpedo based on Ethernet to provide technical support for the hardware-in-loop simulation platform. On this acoustic-optical compound guidancesimulation platform, such studies as application method and performance evaluation of the torpedo with acoustic-optical compound guidance can be conducted.
torpedo; acoustic-optical compound guidance; complete trajectory; Ethernet; hardware-in-loop simulation; simulation platform construction
TJ630.1; TP391.9
A
1673-1948(2012)02-0149-04
2011-05-11;
2011-05-24.
李斌(1983), 男, 硕士, 主要研究方向为鱼雷仿真技术.
(责任编辑: 许 妍)
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
智能计算机与应用(2021年5期)2021-10-05
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
小哥白尼(军事科学)(2020年8期)2020-05-22
军事运筹与系统工程(2017年1期)2017-07-31
雷达学报(2017年6期)2017-03-26
水下无人系统学报(2016年3期)2016-10-13
舰船科学技术(2015年8期)2015-02-27
指挥控制与仿真(2015年1期)2015-01-10
