
护航编队使用火箭助飞声诱饵对抗声自导鱼雷仿真分析
2012-05-27 12:39沈治河
水下无人系统学报 2012年2期
刘 峰, 沈治河
护航编队使用火箭助飞声诱饵对抗声自导鱼雷仿真分析
刘 峰1, 沈治河2
(1. 研究生管理大队 海军大连舰艇学院, 辽宁 大连, 116018; 2. 科研部 海军大连舰艇学院, 辽宁 大连, 116018)
以水面舰艇护航编队对抗声自导鱼雷为背景, 分析了单舰艇使用火箭助飞声诱饵对抗来袭鱼雷, 建立了声自导鱼雷攻击水面舰艇编队和火箭助飞声诱饵对鱼雷实施诱骗的数学模型, 并对声自导鱼雷攻击水面舰艇编队的追踪弹道进行仿真, 分析了不同护航舰艇使用火箭助飞声诱饵对抗声自导鱼雷的过程, 得出了鱼雷能够成功命中编队舰艇的几种态势, 并求取了一种典型态势下火箭助飞声诱饵能够有效保护编队舰艇的最佳投放位置, 为编队合理使用火箭助飞声诱饵提供参考。
声自导鱼雷; 火箭助飞声诱饵; 舰艇编队; 仿真
0 引言
火箭助飞声诱饵是水面舰艇防御声自导鱼雷的重要手段。它的工作原理主要是通过发射装置将声诱饵发射到距舰艇一定的距离、舷角上, 诱饵入水后会产生较高声源级的噪声, 并能够接收和应答鱼雷发出的主动信号, 从而实现将鱼雷引离舰艇, 达到有效对抗的目的。但通常情况下, 声诱饵只能为单舰艇提供近程防御, 而在现代海战中, 水面舰艇主要以编队的形式活动, 因此, 研究火箭助飞声诱饵在编队防御鱼雷中的使用将具有更加广泛的适用性和实际意义。
本文将以护航编队为背景, 通过仿真的手段对编队使用火箭助飞声诱饵对抗声自导鱼雷的过程进行分析。
1 护航编队使用火箭助飞声诱饵存在的问题
护航编队使用火箭助飞声诱饵存在的问题主要在于, 对于单舰艇来说, 火箭助飞声诱饵的使用相对简单, 只要将鱼雷引离舰艇即可。而编队中, 火箭助飞声诱饵的使用不仅要保证发射舰艇自身安全, 还应该保证鱼雷穿过诱饵后不能搜捕到被护航舰艇和其他护航舰艇。要做到这一点, 就必须对声诱饵对抗声自导鱼雷过程进行仿真, 通过对鱼雷弹道的分析, 得出既能保证发射舰艇自身安全, 又能有效掩护被护航舰艇的诱饵投放位置。
2 对抗模型的建立
2.1 对抗态势
编队对鱼雷的防御态势可以通过鱼雷的位置分为2种情况, 如图1所示。
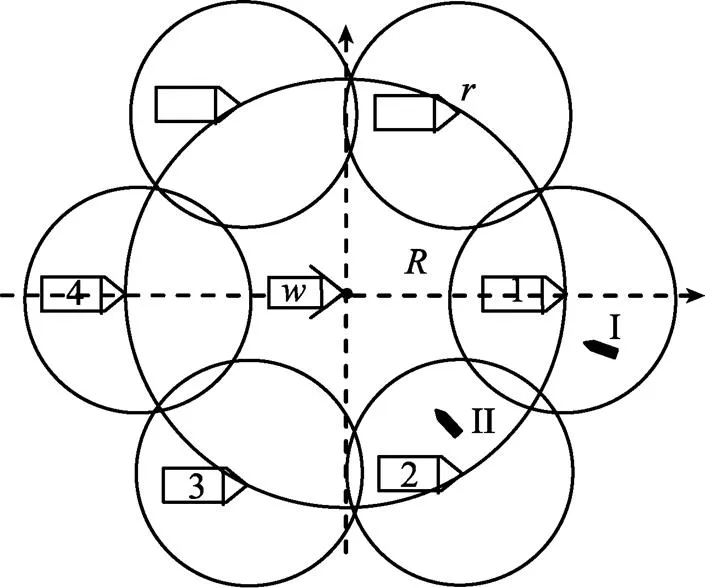
图1 护航编队对声自导鱼雷的2种防御态势
1) 在警戒圆外发现鱼雷(鱼雷I)。此态势下, 可能是潜艇在编队近程警戒圆之外直接对被护航舰艇实施鱼雷攻击, 也可能是潜艇对近程警戒圆舰艇实施鱼雷攻击, 因此很难进行准确地判断, 但无论鱼雷针对何种目标, 护航舰艇均应采取积极的拦截和对抗措施。与单舰防御不同, 其所采取的对抗措施应不使鱼雷穿过诱饵后具有捕捉被护航舰艇的可能性。而此时被护航舰艇也应实施规避机动, 力争拉大与鱼雷之间的距离。
2) 在警戒圆内发现鱼雷(鱼雷II)。此态势下, 潜艇仍然有可能是在编队近程警戒圆之外直接对被护航舰艇实施鱼雷攻击, 也有可能是潜艇已经突破了编队近程警戒圆。无论潜艇的位置在哪, 鱼雷的攻击目标显然都已确定为被护航舰艇, 而这时, 警戒舰艇在鱼雷防御中的作用大大减小, 被护航舰艇将不得不更多地依靠自身机动和自身的鱼雷防御系统实施防御。
2.2 模型的建立
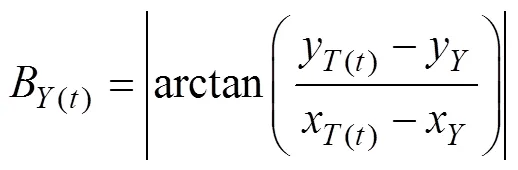
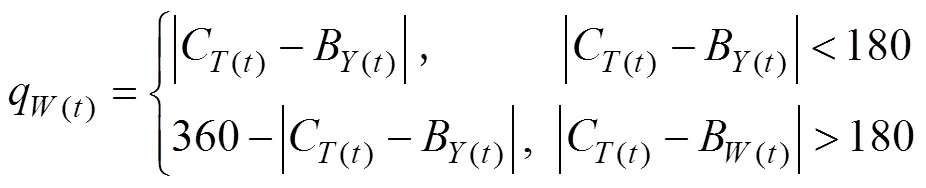
对于每艘护航舰艇来说, 其对抗坐标系如图2[1-3]。
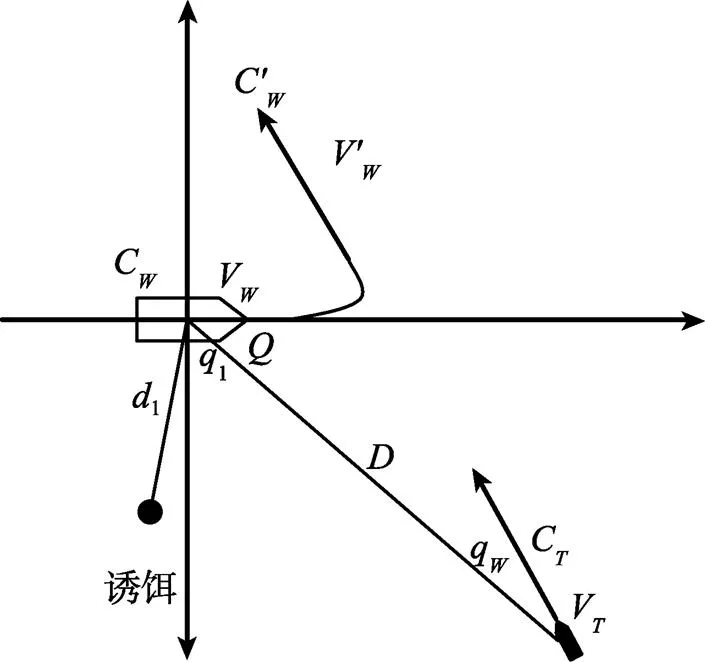
图2 火箭助飞声诱饵对抗来袭鱼雷坐标系
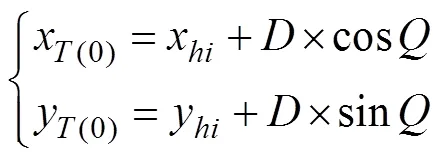
2.2.1 被护航舰艇位置
设被护航舰艇初始位置坐标
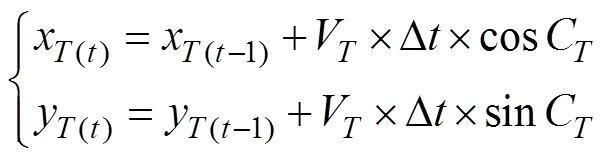
2.2.2 护航舰艇位置

2.2.3 鱼雷位置
鱼雷初始位置坐标
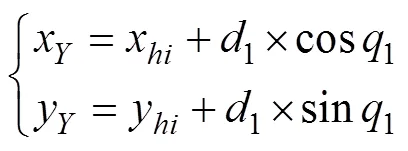
2.2.4 火箭助飞声诱饵位置
2.2.5 鱼雷与被护航舰艇的位置关系(与护航舰艇的位置关系同)

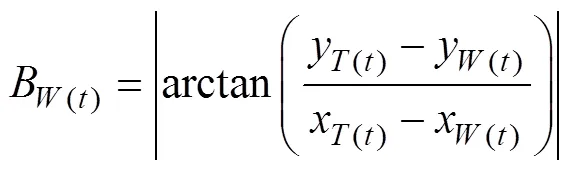
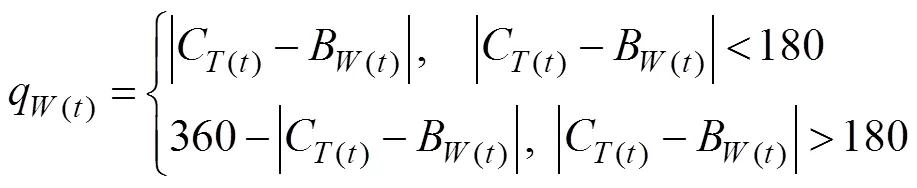
2.2.6 鱼雷与声诱饵的位置关系

2.2.7 声纳探测距离
声纳的探测距离可通过被动声纳方程得出[4]

1) 水面舰艇的辐射噪声

2) 传播损失
影响传播损失的因素较多, 可以用下面的公式近似取得


3) 环境噪声
环境噪声来自于海洋环境和自噪声, 可由下式近似计算取得。

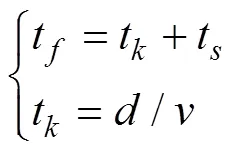
2.2.8 鱼雷搜捕与命中

2) 鱼雷自导逻辑设定
b. 鱼雷首次捕获目标时, 在确认时间5 s钟内, 如果同时有多个目标进入鱼雷的自导扇面内, 以噪声辐射强度大的为优先跟踪对象;
c. 鱼雷在追踪到目标后, 追逐的方式为尾追法;
d. 在已捕捉目标的状态下, 若自导扇面内又出现新目标, 则认为自导装置并不识别, 继续跟踪原目标;
e. 在再搜索过程中发现目标按首次发现目标处理;
f. 若鱼雷航程耗尽或我方舰被击中, 则鱼雷一次攻击结束。
3) 鱼雷捕获和命中的判断
3 仿真计算
3.1 仿真思路
在实际作战中, 鱼雷的航向信息是非常难获得的, 很难判断出鱼雷攻击的目标究竟是护航舰艇或者是被护航舰艇, 因此, 本文对鱼雷所有可能威胁到编队的航向都进行逐一仿真, 进而找出能够应对多种可能威胁的诱饵投放位置。
3.2 参数设定
1) 编队航行机动
2) 鱼雷运动要素
3.3 仿真结果及分析

图4则更复杂一些, 在鱼雷的威胁航向中, 存在以下4种情况: 1) 直接捕捉并命中被护航舰艇; 2) 捕捉到诱饵, 穿过诱饵后命中2号护航舰艇; 3) 捕捉到诱饵, 穿过诱饵后命中1号护航舰艇; 4) 直接捕捉并命中4号护航舰艇。
如图5所示, 对于3号舰艇来说, 当在较小的舷角发现鱼雷时, 由于声诱饵发射存在距离上的限制, 因此舰艇只能对自身提供保护, 而对被护航舰艇则无能为力。
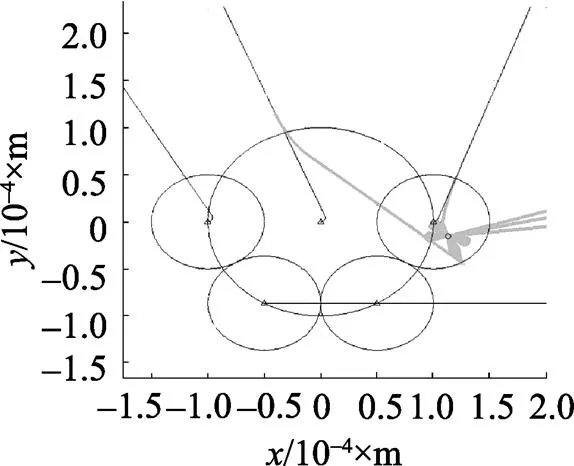
图3 1号舰声诱饵对抗示意图
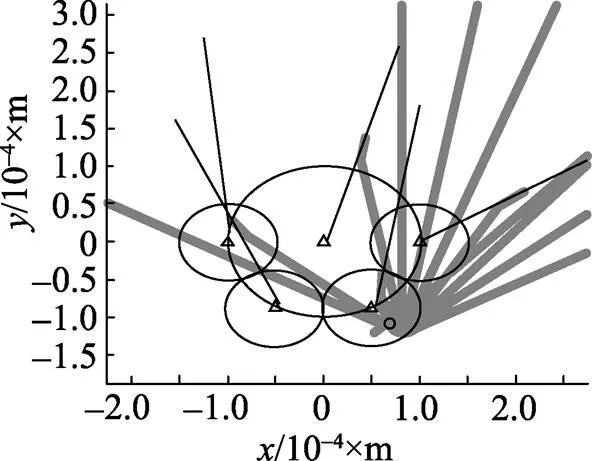
图4 2号舰声诱饵对抗示意图
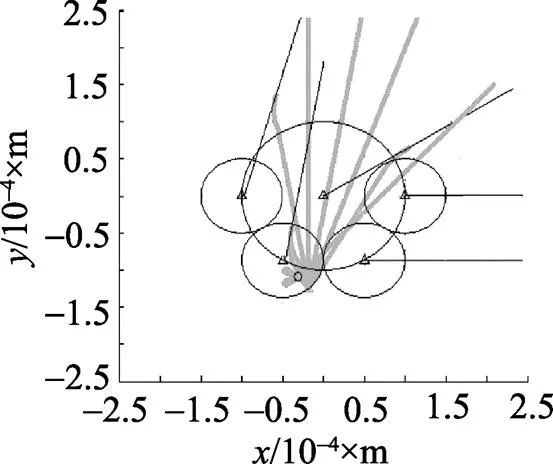
图5 3号舰声诱饵对抗示意图
对于4号舰艇来说, 其发现的鱼雷多是进行追赶攻击, 在仿真中大多数情况下鱼雷对被护航舰艇基本上威胁很小, 4号舰艇只需进行自身的防护, 所以声诱饵的投放只要能够确保自身安全即可。图6(a)中的诱饵显然没有对舰艇实施有效的保护, 鱼雷在穿过诱饵后立即捕捉到了舰艇, 而图6(b)中的诱饵则对鱼雷威胁航向进行了覆盖, 有效地保护了舰艇。
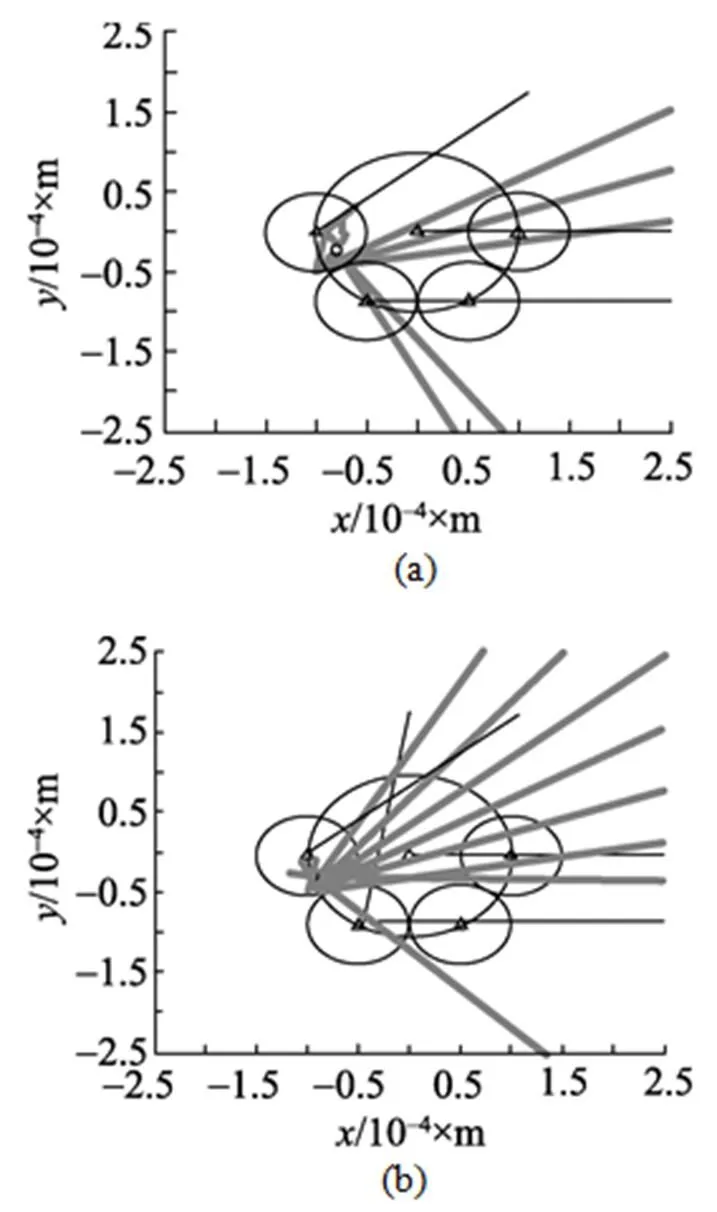
图6 声诱饵处于不同位置时4号舰对抗示意图
由于仿真的数据量较大, 限于篇幅, 本文将数据加以总结, 选取了1号舰艇在5 000 m处发现鱼雷时火箭助飞声诱饵的最佳投放位置(见表1), 可为火箭助飞声诱饵在编队防御鱼雷作战中决策参考。表中, 当鱼雷位于1号舰艇的舷角处于110º~ 170º之间时, 无论诱饵如何投放, 被护航舰艇总是有可能被鱼雷捕获并命中。
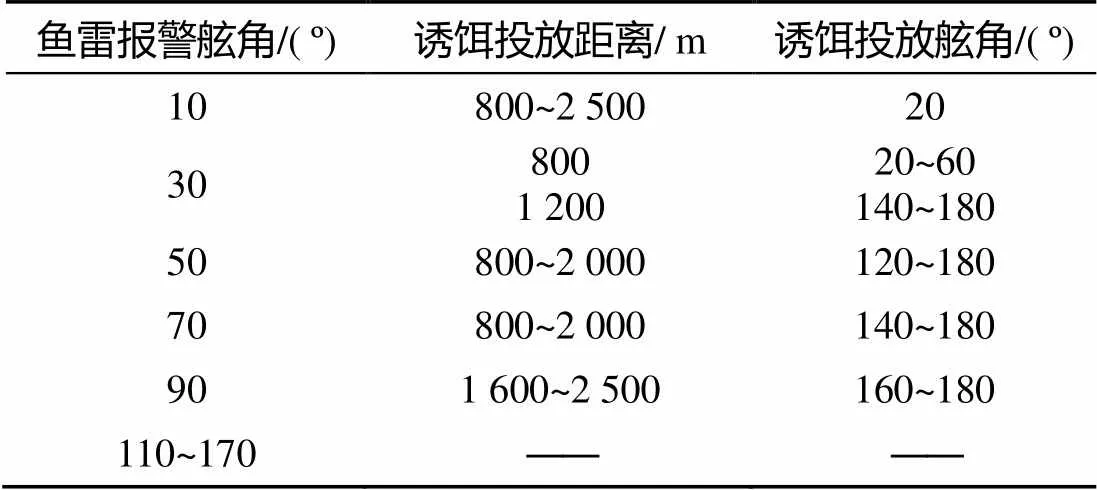
表1 鱼雷距离5 000 m时声诱饵投放位置
4 结束语
由于仿真对抗结果与性能参数的设定和鱼雷的自导逻辑密切相关, 而不同鱼雷的性能参数和自导逻辑可能会有较大的不同, 所以本文在仿真时只采用了一些最基本的参数和逻辑。因此, 今后还需进一步的完善仿真程序, 做出更有针对性的仿真结果。
[1] 刘峰, 沈治河. 火箭助飞声诱饵对抗声自导鱼雷作战仿真分析[J]. 水雷战与舰船防护, 2007, 15(1): 16-20. Liu Feng, Shen Zhi-he. The Analysis of Rocket-Assisted Acoustic Decoy Simulation in Anti-Acoustic Homing Torpedo Operation[J]. Mine Warfare & Ship Self-Defence, 2007, 15(1): 16-20.
[2] 贾跃, 宋保维, 梁庆卫. 火箭助飞声诱饵对抗鱼雷的舰艇规避优化模型及其生存概率分析[J]. 兵工学报, 2008, 29(5): 637-640.
Jia Yue, Song Bao-wei, Liang Qing-wei. Evadable Opti mization Model and Survival Probability Analysis of Warship with Rocket Assist Acoustic Decoy Countering Torpedo[J]. Acta Armamentarii, 2008, 29(5): 637-640.
[3] 贾跃, 宋保维, 崔少波. 助飞声诱饵对抗声自导鱼雷数学模型及其仿真[J]. 系统仿真学报, 2008, 20(2): 67-71. Jia Yue, Song Bao-wei, Cui Shao-bo. The Mathematical and Simulation Model of Countering the Acoustic Homing Torpedo with the Acoustic Decoy[J].Journal of System Simulation, 2008, 20(2): 67-71.
[4] 刘亚光, 孟宪禹. 声纳原理[M]. 大连: 海军大连舰艇学院, 1998.
[5] 刘伯胜. 水声学原理[M]. 哈尔滨: 哈尔滨工程大学出版社, 1993.
Simulation of Convoy Warship Formation Defending Against Acoustic Homing Torpedo with Rocket Assisted Acoustic Decoy
LIU Feng1, SHEN Zhi-he2
(1. Graduate Management Team, Dalian Naval Academy, Dalian 116018, China; 2. Office of Research and Development, Dalian Naval Academy, Dalian 116018, China)
To address a convoy warship formation defending against an acoustic homing torpedo, the process of single warship trapping an incoming torpedo by using a rocket assisted acoustic decoy is analyzed, consequently a mathe- matical model about an acoustic homing torpedo attacking a warship formation and a rocket assisted acoustic decoy trapping an incoming torpedo is established. The tracking trajectory of the torpedo in attacking a warship formation is simulated, and the processes of trapping a torpedo by the decoys from different convoy warships are analyzed. As a result, some torpedo postures with which the torpedo can successfully hit the warship formation are obtained, and the best launching position of the decoy for effectively protesting the formation in a typical situation is achieved.
acoustic homing torpedo; rocket assisted acoustic decoy; warship formation; simulation
TJ630
A
1673-1948(2012)02-0134-05
2011-09-11;
2011-10-14.
刘 峰(1980-), 男, 在读博士, 主要研究方向为水面舰艇防御战术.
(责任编辑: 许 妍)
猜你喜欢
科普童话·神秘大侦探(2022年4期)2022-05-26
作文小学高年级(2022年2期)2022-03-03
智能计算机与应用(2021年5期)2021-10-05
舰船电子工程(2021年6期)2021-06-28
兵器知识(2017年10期)2017-10-19
军事运筹与系统工程(2017年1期)2017-07-31
兵器装备工程学报(2016年12期)2017-01-07
水下无人系统学报(2016年3期)2016-10-13
现代防御技术(2016年1期)2016-06-01
指挥控制与仿真(2015年1期)2015-01-10
