
基于建筑物移位工程的数字化和可视化模拟
2012-05-10 09:31金海陆高进涛杨瑞军
天津大学学报(自然科学与工程技术版) 2012年8期
洪 鹰,金海陆,高进涛,杨瑞军
(天津大学机械工程学院,天津 300072)
建筑物整体平移技术由于其工期短、成本低、节约建材以及减少建筑垃圾等优点,在城市改造过程中既有建筑保护领域日益受到重视[1-2].多支点滑动平移是国内短距离平移方式之一,其特点是托盘上吊装的液压缸下安装滑撬,滑撬底面粘贴不锈钢板,且不锈钢板与滑道钢板上铺设的聚四氟乙烯形成滑动面[3-4].该平移方式具有平移平稳、易于调整、平移速度快和对下滑道的平整度要求相对较低等优点,且随着我国液压同步控制系统的发展(如天津大学机械工程学院开发的建筑物迁移动力系统可以保证位移同步误差在±1.5,mm 以内[5]),该平移方式将被广泛应用,而国内缺少这方面的研究.现场观测实验和仿真实验都表明沉降差对迁移建筑物影响较大[6-7].目前关于沉降对建筑物受力的研究多针对滚动迁移方式,其方法主要有以下 3种:①根据现场观测,做实验来总结规律;②以现场施工得到的数据为基础,对建筑物模型施加位移约束来分析;③构建地基、轨道梁和建筑物模型来分析地基沉降对建筑物受力的影响[7-10].第 1种方法缺少精确性和通用性.第 2种方法只能针对几种情况进行模拟,且该方法与液压缸控制方式不符.第 3种方法计算复杂,地基情况不容易更改且不能考虑液压缸反应时间这个因素.针对以上问题,本文提出了数字化模拟方法,开发了数字路面软件,用户可任意定义路面上轨道沉降状况,进而对各种轨道沉降情况进行模拟.本文又通过一系列的算法把路面变化转化为顶升力的变化,从而模拟不同迁移路面对迁移建筑物受力的影响.
虽然国内外对迁移建筑物进行了许多虚拟仿真也取得了一定的成果,但这些成果是抽象的,不能直接用于指导实践.而建筑物迁移的可视化不仅能用于指导实践而且能对施工前各种工况进行预判,从而使施工更加可靠和经济,但能直观地显示迁移建筑物受力变化的可视化软件鲜见报道[11].本文利用 VC++读取ANSYS结果文件进而驱动迁移建筑物在OpenGL中显示受力变化,利用OpenGL强大的图形操作功能实现对迁移建筑物受力状况的实时、任意角度、分层的观察.本文开发的建筑物迁移可视化系统为迁移建筑物仿真的成果用于指导实践提供了良好的交互平台.
1 数字化模拟介绍
1.1 数字化路面简介
本文所述的数字化路面即指把迁移轨道的高低起伏数字化.工程上一般定义沉降差为轨道变形与平整度误差之和.工程实践表明,滚动迁移方式下,动载荷作用下产生1/1,000的沉降差不会引起上部结构开裂,故在迁移前该数字化路面采用工程上的限值,进行初步预测计算,在迁移过程中则采用实际监测到的沉降差进行有针对性的仿真模拟.本文所述的数字化路面本质上是符合一定要求的一系列的随机数.随机路面的输入界面如图1所示.

图1 数字化路面输入界面Fig.1 Input interface of digital road surface
一组数字路面的生成原则为:①每组随机数的个数与顶升液压缸的个数保持一致性;②每条迁移轨道上的液压缸所经过的路面是同一路面;③输入的最低点和最高点决定生成随机数的范围;④最低点、最高点是相对于初始状态时沉降而言的;⑤移动的距离要不大于路面的长度;⑥根据移动距离和随机点长度确定随机路面上斜坡的个数(如图2中从A到B为一斜坡);⑦根据随机点长度和步距长度确定一斜坡路面上积分点数目(即液压缸分几步从A点滑动到B点).
1.2 数字化模拟实施步骤
数字化模拟有如下5个实施步骤.
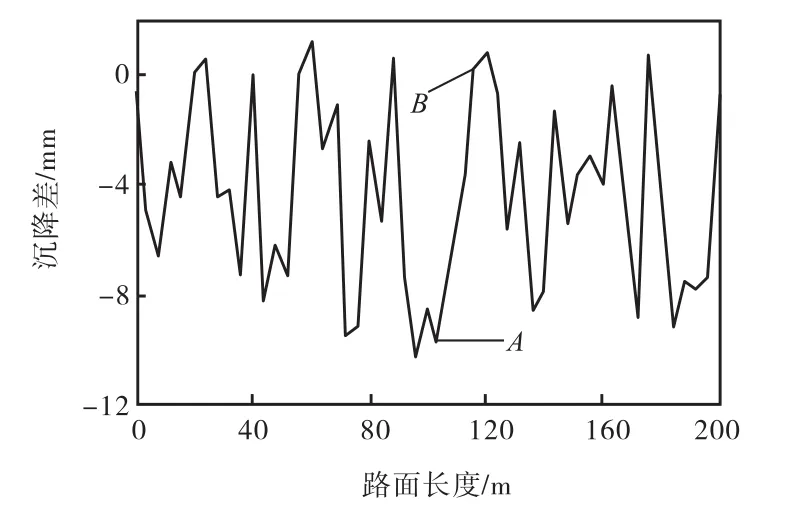
图2 轨道上随机路面示意Fig.2 Schematic diagram of random road surface of an orbit
(1) 建立 ANSYS实体模型,在楼板上加载活载荷,把墙体重量转化为面载荷加在梁上,施加重力加速度,约束托架上所有的顶升点,进行静力学结构分析.分析得到各顶升支点的支反力、建筑物重力以及建筑物该状态时的受力情况.
(2) 提取静力学结构分析结果中的各个顶升液压缸的顶升力和顶升力总和,并把顶升力总和赋值给代表建筑物总重量的参数G.
(3) 根据 ANSYS建立的模型信息以及得到的结果,并设定实际需要测验的数据,填写数字化路面参数,并运行数字化路面程序,生成数字路面模拟数组,其中每一模拟数组中的每一点代表相应顶升液压缸相对于前一时刻的相对高度.
(4) 利用 ANSYS提供的 APDL语言读入数字化路面输出的数据.根据路面不平度与液压缸顶升力的变化关系、液压控制延迟时间、迁移速度以及液压缸的安全裕量、建筑物重力、上一时刻液压缸的顶升力这些相关参数化条件,对读入的数字路面模拟数组进行适当的处理:首先把数组中路面不平度转化为顶升力的变化值,接着根据上一时刻液压缸顶升力值和得到的顶升力变化值计算得到下一时刻顶升力的近似值,然后让得到的顶升力与建筑物重力相比较,得到的差值平均分到每一个顶升缸上,最后计算得到下一时刻要施加的顶升力,然后调用修改后的数据,并一组组赋值给顶升点,设定适当的载荷步和子步数,进行求解,该步骤具体举例说明如下.
假设路面不平度为±Hmm,因沉降液压缸每次调整压力 Δ p =ΔHα,且要满足p + Δp <液压缸的安全许用压力,其中ΔH为迁移时同一个支点前后2个状态时的沉降差,α为相关系数,因为安装后每个缸的刚度及所处位置的不同,α也会有差异,故本文取平均值,该值是要根据不同的工况进行调整的,p为液压缸某一状态时的压力.则当建筑物的某一支点由 A平移到设定的距离 B时,该支点的液压缸顶升力由 A状态时该支点顶升力加上平移后由于路面沉降所造成的力的变化确定.例如假设 A状态该支点顶升力为F(N),B状态时该支点沉降差为ΔHmm,则B状态时该支点顶升力为F+ΔHαS,其中S为缸径面积.迁移时某一状态的顶升力都是根据其前一状态计算得到.此外该系统还可以根据平移速度、液压缸控制延迟时间等参数之间关系来考虑控制延迟问题.
根据上述原理则可得出每一平移状态时的液压缸顶升力.由于每一状态时生成的一组顶升力的总和并不一定等于建筑物重力G,故为了保证每个顶升力数组的总和与建筑物重力相等,设 M 为每个数组内的顶升力累加的总和,则在每次调用某数组之前,先比较 M 与 G的值是否相等,如果相等,则直接调用该数组;如果不等则将(G - M ) /K的值分别加到该数组的所有数,然后将得到的新的顶升力数组赋值给各顶升点,其中K为支点数目.由于液压缸由一种状态进入下一种状态不是突变的,即液压缸的顶升力是渐变的,故设定子步条件时,设定顶升力呈线性变化,时间则根据迁移速度,计算步距及计算机计算时间综合考虑.
(5) 求解输出上述各子步节点的位移变化量、应力变化云图和弯矩图等,即根据数字化模拟得到的建筑物迁移受力变化结果,可得到建筑物迁移过程的数字化模拟结果.
根据本文工程实践所得到的相关数据,对某一 6层框架结构建筑物进行数字化仿真模拟,得到平移时某一状态受力如图 3所示.从分析结果可以直观看出迁移建筑物托盘受力变形较大,且液压缸顶升处、推力液压缸施力处和抱住梁与卸荷梁的结合处有明显的应力集中,卸荷梁起到了较好的卸荷作用.仿真得到的关键部位的受力状况与实际迁移建筑物观测到的情况较为相近,例如宁夏吴忠宾馆平移采用了多支点滑动迁移方式,在平移过程中出现了如上所述的情形[4].
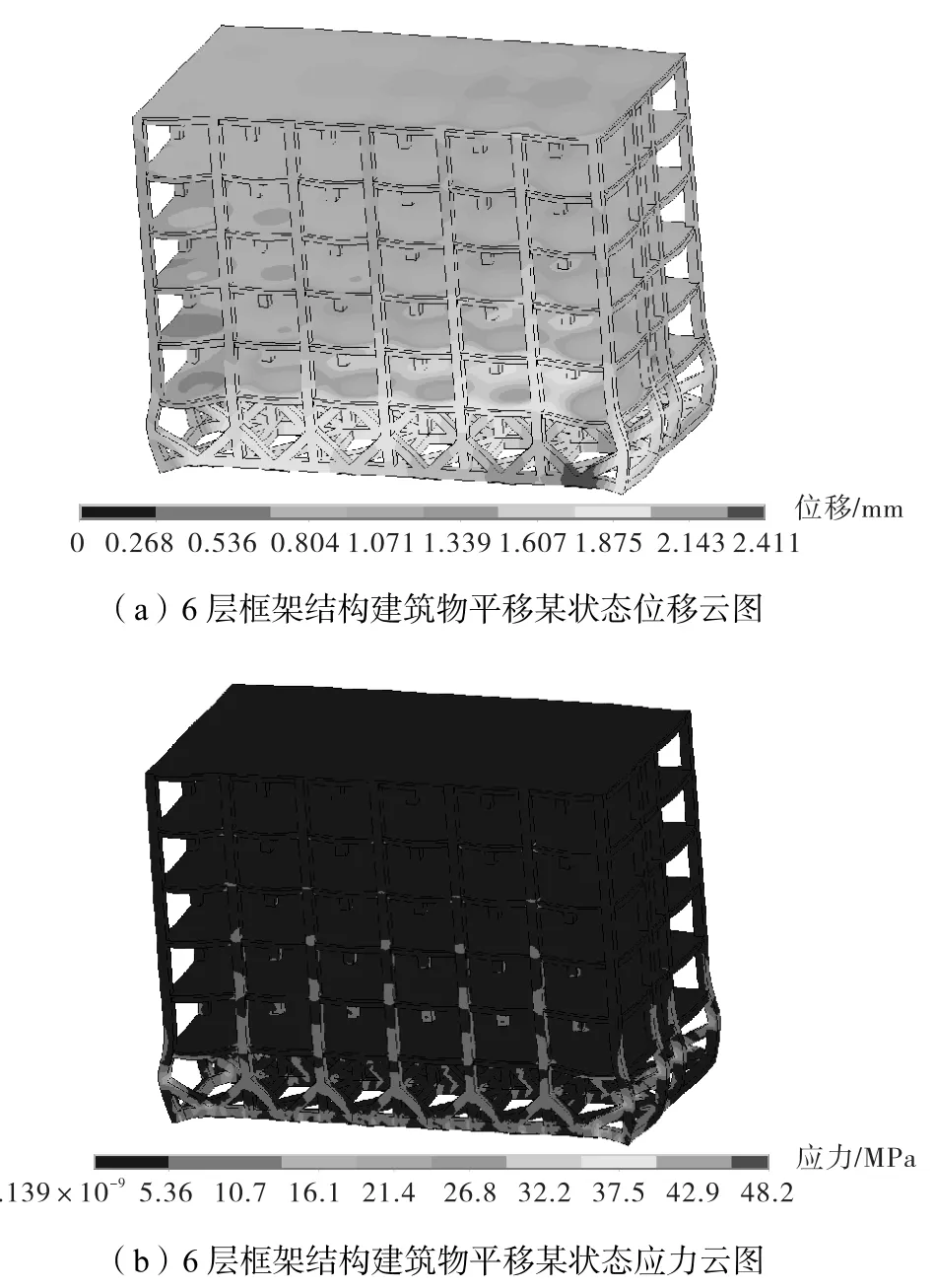
图3 数字化分析示意Fig.3 Schematic diagram of digital analysis
2 可视化模拟
本文实现建筑物迁移可视化有如下8个步骤.
步骤1用ANSYS对迁移建筑物进行有限元分析,输出需要的信息.信息包括节点坐标、单元信息、节点变形、节点或单元等效应力.
步骤2初始化OpenGL环境.
步骤 3通过 VC++读入 ANSYS的节点坐标[12-13]和单元信息文件并进行相应的投影变换,使用OpenGL的画面命令重现建筑物模型.
步骤 4利用 OpenGL贴图和三维实体构造函数来构建迁移建筑物场景,利用 OpenGL的光照和材质函数来渲染场景,利用其反走样和融合图像处理方法使仿真物更具真实感.
步骤5通过VC++读入ANSYS分析出的建筑物节点x、y、z方向的变形量,并设定一定的夸大系数来驱动建筑物的变形.
步骤6通过VC++读入ANSYS分析出的建筑物单元或节点前后2个状态的应力来通过颜色的深浅显示建筑物迁移过程中应力的变化情况.
步骤 7通过视图变换实现对迁移建筑物放大、缩小及任意角度的观察,通过建筑物节点高度方向的坐标和设定值进行比较,实现对迁移建筑物的分层观察.
步骤 8利用 OpenGL的双缓存技术实现迁移建筑物的动画演示.
对于步骤 1,由于每次分析的都是一个模型,故只需输出一次节点和单元信息.为方便数据的读入,需要输出的数据中间无间断并统一格式,输出数据后需要把输出数据文件内容中开头部分介绍性的数据和最后列出的最大最小信息去除.
对于步骤 3,目前通过很多三维软件建模之后通过一定的格式转换和 VC++信息读取也可重现图形,但传统的从AutoCAD、3,DMAX等文件中提取结构物信息的方法,由于各自文件存储格式的限制,需要花费大量的精力和时间且其数据和有限元分析得到的数据很难对应,无法实现对任意点的驱动[14].模型坐标和屏幕坐标不对应,故需先变换模型坐标.再由于模型顶点的坐标经过变换后可能不在视口范围内,因此可能无法在屏幕上显示,故需一定变换.首先计算模型的尺寸范围和中心点坐标,将模型的尺寸范围与视口大小进行比较获取模型的放大倍数,根据获得的结果对模型进行放大或缩小到能在窗口中显示,然后将模型中心位置移到视口中心位置处即可.
对于步骤 5,由于输出的文件中不仅包含 x、y、z坐标的位移变化量还包括每个节点的位移变化总量,为减少读入的数据量,故编写程序只读取x、y、z坐标的位移变化量.
对于步骤 6,由于迁移过程中并不一定是应力大的部位是危险部位,而应力变化大的位置却很有可能是危险部位,故本文采取每次读取 2个状态的应力值,通过比较它们的差值的绝对值来显示危险位置.
对于步骤 7,把视点的位置设为变量,设定键盘上6个按键与3个变量相关联,通过按键实现对迁移建筑物放大、缩小及任意角度的观察.
对于步骤8,采用OpenGL进行三维建模并实时显示对计算机的要求较高[15],且实体建筑物模型的节点达几十万之多,故本文采取逐步读入和区别对待的方式.本文每一帧只读取 1个状态的位移变化量文件和2个状态的应力文件,节点坐标和单元信息文件只读入1次,其他读入的文件内容显示后立即删除其占用的内存空间.同时也可以通过一定的方式把节点坐标、位移和应力文件合为 1个文件,从而大大减少读入的数据量.

图4 建筑物迁移位移变化模拟示意Fig.4 Simulated diagram of displacement changes in building moving
可视化仿真结果如图4和图5所示,图4中颜色和变形都表示位移变化,其中图 4(a)中是未施加推力和摩擦力时建筑物位移变化云图,图 4(b)平移过程中某一时刻的位移变化云图,颜色深表示绝对位移大.图 5中变形做了一定的夸大,颜色深浅表示应力变化量的大小,从图中可直观地看到应力变化最大处和最小处的位置.图 4是通过读取某一时刻节点位移来实现的,图5是读取某一时刻单元位移和前后2个时刻的单元应力来实现的.从图中可以看出如果利用节点驱动变形和应力变化,可视化中图形的结构受力变化会更平滑的显示,这是OpenGL中提供了利用一个平面图形中各点颜色的深浅来平滑地填充整个图形的颜色渐变模式.施工人员从图中可以直观地看出液压缸布置是否合理和迁移建筑物的危险点位置,从而为施工决策提供依据.
建筑物迁移可视化仿真系统可以发展成为建筑物的位姿变化监控系统的一部分.平移安全监测主要包括静态实时监测和动态实时监测,工程中一般采用的方法是设定监测的对象和位置,得到数据后跟控制指标限制做比较,进而对平移稳定性和安全性进行判定并作出相应的调整[3,16].该方法具有不直观、不精确等缺点.如果将该可视化系统应用于迁移工程可解决以上问题.例如通过本系统可事先研究出各顶升液压缸及各推力缸之间的力耦合关系,作出相关的拟合曲线,进而制定相应的控制策略.在实际迁移过程中将检测到的各液压缸的顶升力和推力实时反馈给该系统,该系统通过子模型等相关技术对重点部位进行详细分析计算,进而可直观实时显示各时刻迁移建筑的受力状况特别是危险部位的受力变化情况,点击各部位则可显示该部位的应力应变数值.针对迁移建筑物的受力状况和液压缸顶升力、推力的变化,结合各液压缸的耦合关系和制定的控制策略,进而对各液压缸进行有针对性的控制,保证迁移安全进行.

图5 建筑物迁移位移和应力变化模拟示意Fig.5 Simulated diagram of displacement and stress changes in building moving
3 结 语
本文通过多种软件的联合仿真,实现了不同路面状况下迁移建筑物受力变化的数字化模拟,并实现了模拟迁移过程的可视化,本文的研究成果可为工程实践提供指导并能对迁移工程的可靠性进行预判.同时本文开发的可视化仿真系统可以发展成为建筑物的位姿变化监控系统的一部分,进而保证迁移工程的顺利进行.
[1]李爱群,吴二军. 我国建筑物整体平移技术及工程应用进展[J]. 江苏建筑,2003(增1):48-54.
Li Aiqun,Wu Erjun. Development of the building monolithic movement technology and engineering in China[J].Jiangsu Construction,2003(S1):48-54(in Chinese).
[2]Pryke J F S. Re-leveling,raising and re-sitting historic buildings[C]//Proceedings Symposium IAB SE.London,1983.
[3]郑东强,阎祥安. 建筑物移位工程位移控制临界值分析[J]. 煤炭学报,2007,32(7):714-718.
Zheng Dongqiang,Yan Xiang’an. Analysis of critical displacement in building moving project[J].Journal of China Coal Society,2007,32(7):714-718(in Chinese).
[4]尹天军,朱启华,蓝戊己. 吴忠宾馆整体平移工程设计与实施[J]. 建筑结构,2006,36(9):1-7.
Yin Tianjun,Zhu Qihua,Lan Wuji. Monolithic shift design and practice of Wuzhong hotel[J].Building Structure,2006,36(9):1-7(in Chinese).
[5]肖聚亮,阎祥安,王国栋. 大型结构物迁移工程装备控制技术[J]. 哈尔滨工业大学学报,2008,40(1):155-159.
Xiao Juliang,Yan Xiang’an,Wang Guodong. Control technology of the equipment for huge structure moving[J].Journal of Harbin Institute of Technology,2008,40(1):155-159(in Chinese).
[6]贾留东,夏凤敏,张 鑫,等. 莱芜高新区 15层综合楼平移设计与现场监测[J]. 建筑结构学报,2009,30(6):134-141.
Jia Liudong,Xia Fengmin,Zhang Xin,et al. Relocation moving design and in-situ monitoring for a fifteenstory building[J].Journal of Building Structures,2009,30(6):134-141(in Chinese).
[7]吴二军. 建筑物整体平移关键技术研究与应用[D]. 南京:东南大学土木工程学院,2003.
Wu Erjun. Study and Application on Building Monolithic Movement Technology [D]. Nanjing:School of Civil Engineering,Southeast University,2003(in Chinese).
[8]唐小军. 吴忠宾馆整体平移工程分荷结构研究[J]. 建筑技术,2007,38(6):419-421.
Tang Xiaojun. Research on load-sharing structure in translating Wuzhong hotel[J].Architectural Technology,2007,38(6):419-421(in Chinese).
[9]Byford B,Hampton M. Micropiles for re-support and lifting of two buildings under construction[C]//2009International Foundation Congress and Equipment Expo.Florida,USA,2009:383-389.
[10]吴二军,张素玲,王建永. 复杂结构斜向平移工程托换结构与轨道协同受力分析[J]. 建筑结构学报,2010,31(增 2):279-284.
Wu Erjun,Zhang Suling,Wang Jianyong. Combined mechanical analysis on underpinning structures and moving tracks for a diagonal building moving project[J].Journal of Building Structures,2010,31(S2):279-284(in Chinese).
[11]郑东强. 基于非概率区间集合模型的建筑物迁移工程多支点控制研究[D]. 天津:天津大学建筑工程学院,2007.
Zheng Dongqiang. Research on Multi-support Control of Building Moving Based on Non-Probabilistic Interval Set Model[D]. Tianjin:School of Civil Engineering,Tianjin University,2007(in Chinese).
[12]刘振平,贺怀建,朱发华. 基于钻孔数据的三维可视化快速建模技术的研究[J]. 岩土力学,2009,30(增l):260-266.
Liu Zhenping,He Huaijian,Zhu Fahua. Study of technology of fast 3D modeling and visualization based on borehole data[J].Rock and Soil Mechanics,2009,30(Sl):260-266(in Chinese).
[13]杨锡鎏,周翠英. 基于 ANSYS与 OpenGL 的高速公路结构物仿真建模及三维地层地表修剪方法[J]. 岩土力学,2010,31(2):571-576.
Yang Xiliu,Zhou Cuiying. Emulation modeling for structures and clipping method for ground surface of 3D stratum along highway based on ANSYS and OpenGL technology[J].Rock and Soil Mechanics,2010,31(2):571-576(in Chinese).
[14]贺少华,吴新跃. 基于 VC++和 OpenGL 的大型机械装置虚拟教学训练系统的开发[J]. 系统仿真学报,2009,21(4):1059-1062.
He Shaohua,Wu Xinyue. Desktop VR prototype for mechanical devices training applications[J].Journal of System Simulation,2009,21(4):1059-1062(in Chinese).
[15]Go Y,Tatsuya N,Shinji M,et al. 3-D geologic modeling and visualization of faulted structures:Theory and GIS application[C]//Proceedings of the Open Source GIS-GRASS Users Conference.Trento,Italy,2002:315-321.
[16]吴二军,黄 镇,李爱群,等. 江南大酒店平移工程的静态和动态实时监测[J]. 建筑结构学报,2010,31(12):11-14.
Wu Erjun,Huang Zhen,Li Aiqun,et al. Static and dynamic real-time monitoring of Jiangnan hotel movement engineering[J].Journal of Building Structures,2010,31(12):11-14(in Chinese).
猜你喜欢
数学大王·低年级(2021年2期)2021-02-21
小学阅读指南·低年级版(2020年11期)2020-11-16
山东交通科技(2020年2期)2020-08-13
重型机械(2020年2期)2020-07-24
中学生数理化·八年级物理人教版(2018年5期)2018-06-21
现代装饰(2018年3期)2018-05-22
制造技术与机床(2017年5期)2018-01-19
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
火炸药学报(2014年3期)2014-03-20
筑路机械与施工机械化(2014年2期)2014-03-01
