
空间语法中的空间关系表征
2012-04-24 05:52:56邓仕伦
外国语文 2012年3期
肖 燕 邓仕伦
(1.重庆师范大学 外国语学院,重庆 400047;2.重庆大学 城市科技学院,重庆 402167)
1.引言
空间语法为研究和阐释人类的空间认知提供了一个基本框架。在认知语言学中,空间语法包含两个英文学术概念:一是 Langacker(1982,2004)提出的空间语法(space grammar),又称认知语法(cognitive grammar);二是Levinson(2006)提出的空间语法(grammars of space)。两者之间有密切联系但有很大不同:他们都把语言视为认知能力不可分割的一部分,视语义结构为概念结构。前者的重心在于语义结构和语法结构关系,重视语言的象征功能和语音象征的概念化过程,认为语言的固化和约定俗成来自语言的使用,因此认知语法又被称为以使用为基础的语法(usagebased model of grammar)(Evans,2007:21)。后者的研究重心在于人类对空间的认知及其语言表征的空间关系,是人类用不同的语言结构表征的语言认知空间。本文主要依据Levinson等人提出的空间语法理论,讨论空间语法体系中空间认知与空间关系的表征。
2.空间与空间认知过程
没有语言,人类的经验使人们把空间理解为相同的形式,语言的不同使空间概念千差万别(Whorf,1964:158)。空间是各种不同场所和方位的总称,在物理学领域,空间距离的测量无所不在,天文学产生令我们难以想像的磁场(空间),从哲学角度看,无论在知觉还是范畴层面,我们的现实经验都是空间的,自然空间不能与人的实践空间分开(Sellars,1909)。哲学意义上的空间是无所不在的,世界的属性就是其空间性,因此海德格尔(2009:309-310)认为,空间性是世界的一种构成因素,世界的空间性依循日常此在的世界从现象上获得崭露,只有以作为寰世的世界为依托,空间性才明白可见。但普通意义上的空间概念更倾向于主观和客观之分,客观空间是空间存在的物理形式,主观空间是我们感知和认知空间的形式,又可以分为知觉空间(perceptual space)和认知空间(Couclelis & Gale,1986)。知觉空间之所以存在,是因为我们能够通过感觉器官感知物体出现和存在的过程,往往与我们紧邻的事件和行为相联系;而认知空间可以不和我们身边现存的事和物发生直接关系,只与过去发生和未来要发生的事物相联系,这些形式被人们通过特定的语言结构表征出来,因此,空间概念可以概括为“物理空间、认知空间和语言空间”(文旭、匡芳涛,2004)。
人类对空间的认知经历了从一维的线性空间、二维的平面空间到三维的立体空间过程。中国人对空间的认知很早就形成了二维和三维空间的概念,《诗经·周南》中说:“参差荇菜,左右流之”和“参差荇菜,左右采之”中的“左右”维度就选定了以观察者为中心的相对参照点,是一个二维投射的平面空间。《管子·天地之间》中的“宙合”概念把天地看着万物之囊,认为宙合“上通于天之上,下泉于地之下,外出于四海之外,合络天地以为一囊”,其中的空间有六个维度:“天地”、“四海”包含了“上下”、“东南西北”及其所体现的前后和左右,同时体现了绝对空间和相对空间的概念。
西方人的空间观念是在2000年来的西方哲学思想中形成的。早期的希腊思想界就对空间是物质的还是真空问题有过许多讨论,柏拉图认为空间是具有几何特征的物质,笛卡尔认为语言的多维度表达是空间认知的核心,这种思想与现代的朴素空间概念一致;亚里士多德从现象学角度把空间分为六个维度:上下、左右、前后,这几个维度并不都以人为准,它们在本质上是各自独立的,与管子的空间概念不谋而合;牛顿对绝对空间(absolute space)和相对空间(relative space)作了区分:绝对空间总是一样的、静止的,与外界无关,相对空间是变化的、是对绝对空间的测量;康德也认为绝对空间是先于认知空间而存在的(Levinson,2008:3-7)。
客观存在的空间是虚无而无界的,也是无穷大的,通过感知和语言表征后变得现实。从物理空间到认知空间和语言空间是基于对物理空间的认知语言表征过程,即“现实—认知—语言”(王寅,2006:171;文旭、匡芳涛,2004)。空间是所有物体存在和运动的参照背景,而所有物体都存在于宇宙中,即宇宙是所有物体的共同处所,而物体的直接处所只为某一物体持有,宇宙通过一系列越来越大的包容物中介为所有物体共有(吴国盛,1994:8-9)。由此可知,虽然空间是无形的,但人类可以通过空间的依托物去感知空间的存在,例如:
(1)操场在教学楼和办公楼之间。
例(1)中的操场、教学楼和办公楼之间的位置关系确定了操场的方位,同时,我们感知到操场、教学楼和办公楼的存在,它们都是存在于空间中的物体,与空间一起构成统一体,由此感知到空间的存在,通过感知和确立这些物体的空间方位,对无形空间进行有形认知。
认知语义学和语言类型学的语言认知研究中,空间范畴和概念空间具有中心地位,空间认知被看着是人类最基本的认知形式,人类许多基本推理形式都依赖空间认知(Croft,1999;Levinson & Wilkins,2006),对空间的认知体验也远远早于用语言描述的概念空间,如婴儿在学会说话之前就已经能够凭借视觉和听觉辨别空间方位,因此,对空间的认知过程始于体验,在与现实的互动中形成格式塔空间图式(图形与背景),从而抽象出概念并用语言表述出对空间的认知体验过程。
认知语言学对空间的理解和语言表征是通过范畴化后对空间和其它处于同等地位的概念图式化后形成的空间概念。根据功能的不同,大脑分为不同的模块,语言和空间认知模块之间的关联实质上是概念结构和空间表征间的关系,概念结构包含命题表征,空间表征是意象图式或心理模型表征的中心(Jackendoff,1999:5)。空间的意象图式也是Croft(2004:45)所划分的七个基本图式之一,空间的图式化体现了对空间的识解:上下、前后、左右、远近、中心与边缘、接触等空间关系。Talmy(2000:177)认为,图式化同样是一个过程,这个过程包括对能够体现整体场景的参照场景的某些特征进行系统选择,忽略不需要的特征而对注意的焦点进行定位,形成空间结构的概念化。
3.空间语法与空间关系的语言表征
人类对现实空间的感知和语言所表征的空间在空间语法中有一个共同的框架和表征原则,即以参照物(背景)为依托确定物体(图形)的方位,表征具有可理解性的动态和静态空间关系。
空间语法是研究空间认知和空间关系基本框架。在这个框架体系中,不同语言和文化的语言空间认知结构和表征方式都包含三个层面:拓扑空间关系(topological relations)、运动(motion)空间和空间参照框架(frames of references)(如图1)。认知语言学中的拓扑空间不是数学中的拓扑概念,它是指我们看见或感知到的静态空间及其语言表征出来的静态空间关系;运动主要强调对空间中物体运动和运动事件的识解及其语言表征;而参照框架则是空间描述依托,不借助参照框架,我们很难用语言表征出各种空间关系。
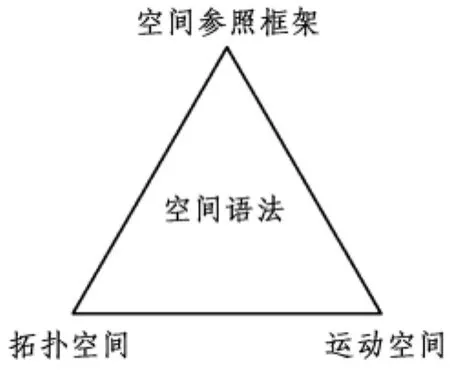
图1 空间语法框架
空间语法对空间关系的描述基于人类空间认知的共性。由于语义类型的不同,空间认知表现出一定的差异,但空间语法不像传统的型态句法学那样一味探索语义与形式的对等,而是致力于探索语义概念的共性与个性。认知的普遍性使人们能够内在地表征世界,并映射为表面化的语言形式。Talmy(2000:180)把语言描述的空间分为两个子系统:一是任何形式的空间,为空间的基体架构,具有包容性和定位性,与之相关的静态概念包括地域与方位,动态概念包括路径(path)与置放(placement)。二是空间构型和占据空间立体位置(volume)的物体之间的相互关系,即空间的内容,这些物体的图式化后经过语言表征出来,这样,语言描述使空间现实化。
在空间语法体系中,空间认知是通过理解空间关系实现的。在被感知前,空间是无形的,通过感知空间中的实体而感知空间的存在,空间实体的方位通过理解它在环境中与其它物体的方位关系确定。例如:
(2)a.The tree is in the middle of the field.
b.The rabbit is running across the field.例(2)a中的“中间”、“田野”作为选定的参照物,确定了“树”的位置,使得三者之间的空间关系明确而具体。例(2)b的rabbit作为动态物体,其运动的路径“running across the field”被置于静止的“田野”内,描述了特定场景中的动态空间。
3.1 空间描述的基准:参照框架
空间图式中存在具体和抽象的概念与实体,抽象概念及其相互关系表征借助空间场景中的实体和更加具体的概念(Tenbrink,2011),因此,对一个物体位置的描述总是以另一个物体为参照,即图形靠背景来突出:
(3)a.The picture is on the wall.
b.The boy is running across the road.“picture”、“boy”的位置是背景衬托出来的。更多时候,我们需要确切描述物体或物体运动的方向和位置:前后左右、东西南北等,这样就需要一个参照框架作为描述的基准。例如:
(4)a.Young people took the window seats on the right side.
b.We entered the cinema by the north entrance.
c.从歧路东南二十五里,过密县,抵天仙院。(徐霞客,《游嵩山日记》)
在例(4)的三个句子中,所指方位的描述都有一个参照框架,a中的“on the right side”确定了“window seats”的具体方位,b和 c中的“the north entrance”和“歧路东南二十五里”指明了路径的方向。
参照框架是语言表征空间关系的基础。根据参照框架在空间描述中的作用,Frawley(1992:263)划分了两个投射性空间参照:以参照物体为基准和以观察者为基准,根据观察者视角和凸显点的不同,Levinson(2008:32)把它们进一步具体化为以环境为中心的参照框架,以观察者为中心的参照框架和以物体为中心参照框架。这三种类型在空间语法中系统化为一个空间参照框架体系,即绝对参照框架、内在参照框架和相对参照框架(Levinson et al,2002,2006,2008)。
3.1.1 绝对参照框架
绝对参照框架是指由地球引力(或以标准定位为准的视觉水平线)所提供的固定方向为背景的空间参照框架。如东、南、西、北四个方位作为绝对参照框架有较强的稳定性和客观性,多用于定位、描述运动方位、静态的分离图形和背景、或者大的空间场景,在例(4)b和(4)c中,由于使用了绝对参照框架,听话人(读者)不受语境制约就可以比较准确地理解说话人描述的方位。
绝对空间参照框架不考虑讲话人的位置,而是以物体和它的参照物形成二元关系来确定物体的具体位置,这种关系中的图形和背景是自变量,协调系统基于固定方向,其起源总是以背景为准,通过对背景进行演算来确定图形的方位,一般利用相对稳定的环境因素,大自然中较为固定的实物如山坡、河流流向、风向、以及天体方位等也可以作为基本方向,如澳洲北部土著语言Jamingjing用河流流向做绝对参照,Yeli Dyne用上下指东西方位(Levinson,1997),它的心理相关度较弱,在许多语言中固定方位观广泛用于水平标准方位。
3.1.2 相对参照框架
相对参照框架是从绝对参照框架衍生出来的,因此,有相对参照框架的语言中就一定存在绝对参照框架(Levinson&Wilkins,2006:543)。在空间场景中,观察者把自己身体的方位投射到目标场景中,自我成为中心位置,把自我中心轴(身体位置的前、后、左、右)投射到背景物体上,成为一个确定方位的并列参照体系,如:
(5)The ball is behind the tree.
例(5)中并没有出现观察者的信息,却是典型的观察者中心轴,“树”本身没有固有的前后左右,观察者把面对自身的一面视为树的“前(front)”,由此可以推导,“树”处于观察者与球之间的位置。
3.1.3 内在参照框架
除了少数语言如Guugu Yimithirr外,在拓扑空间描述中,内在参照框架几乎存在于所有语言中,发展心理学的研究表明,它是儿童首先在语言和推理中使用的参照框架(Levinson&Wilkins,2006:542)。内在参照框架用于既定的空间构型,尤其是那些本身具有内在和固有特性的物体,只需要依赖图形与背景的二维关系就可以确定,涉及图形和背景的相互关联的内在方位,以物体(被感知对象)为中心,观察者只是一个隐性存在:
(6)房前有棵树。
房屋的面是固定的,根据人们约定俗成的推理模式,房屋的正门方向为“前”,观察者是否存在或变换视角,“树”的方位始终在房屋的正门方向位置。
3.2 拓扑空间关系的基本结构与典型描述
语言学中的拓扑空间是指语言所描述的静态空间。拓扑空间关系也是典型的图形和背景关系,可以用几个基本方位结构表现,这些基本方位结构也是拓扑空间关系的基本方位功能,如下表:

表1 拓扑空间关系的基本方位结构(Frawley,1992:255;Ameka & Levinson,2007)
在英语中,空间方位结构的范畴覆盖了表方位的介词所描述的空间关系,在这些方位结构中,on,in,over和under所描述的方位是拓扑空间方位结构中最典型的场景,特别是in和on两个词所表达的包含和垂直支撑概念,是儿童最先习得的概念之一(Levinson,2006:520)。英语中的这些介词组成的短语表现了图形与背景的相关度。相对于背景Y而言,图形X往往是一个相对较小、具有可移动性、无生命的物体,图形与背景之间的典型关系表现为接触或相邻。其中可以包含一个表方位的动词,也可以不用方位动词,但基本方位结构中图形与背景的拓扑空间关系一定包含在位置介词或者关系名词中:
(7)a.The school lies at the foot of the mountain.
b.The school is at the foot of the mountain.虽然空间描述存在一定语言类型和文化差异,但典型的拓扑空间关系语言表征形式都是回答“在哪里?”问题的最佳句型。齐沪扬(1998)认为,英语在这方面更多关注物体在空间中的点、线、面、体,汉语更多注意物体是否在注意的空间范围内,因此,英语典型的拓扑空间结构描述是用含介词的系词表征的空间关系,中文用“……在……”句式描述物体的拓扑空间方位:
英语:NP+BE+PP
汉语:X在Y+方位名词
例如:

表2 拓扑空间关系的典型表征结构
根据Talmy(2000:222)对语言类型的分类,英语和汉语同属附目框架语言(satellite-framed language),核心谓语都需要和助词或虚词一起构成完整谓语,在语言比较中汉语归属典型的孤立语,英语同样有很多孤立语特征。因此,英汉两种语言在描述方位时,句法上没有太大差异,空间语言有一定的相似性,拓扑空间描述都不用运动动词,差异更多来自对方位的理解。虽然在英语和汉语中不用系词也可以用动词直接描述方位,英语的系词结构“NP+BE+PP”和汉语的“在……+方位名词”更好地回答了Where问题。表1中的对“where”问题的回答如果用英汉语分别表述为:“It stands in the city centre.”和“它坐落在三峡广场”,在用词和句法上也是允许的,但不是最恰当表述,英语的系词结构句和汉语的“在……+方位名词”句更自然,在这一点上,汉语动词句的使用更加严格:
(8)a.— Where is the cup/egg?
— It’s on the table/in the bowl./It stands on the table/lies in the bowl.
b.——茶杯/鸡蛋在哪里?
——在桌子上/在碗里 (站在桌子上/躺在碗里)。
例(8)a和(8)b中,“on the table/in the bowl”和“在桌子上/在碗里”是最为恰当的表述。在(8)a中,如果用stand/lie描述显得有些不自然,但可以接受,而(8)b中的“茶杯站在桌上”或“鸡蛋躺在碗里”是不能接受的。
拓扑空间是一个多维语义空间,每一个空间场景都可能偏离典型空间场景,与其它标准场景融合。在英语中,on、in、over和under表征的方位关系中,in表达的静态包含关系的场景是最常见的,其次是on表达的图形与背景的接触场景(Levinson & Wilkins,2006:522)。
3.3 运动空间的语义识解
运动是物体位置的移动,处于动态位置上的物体有运动的方向,能够显示出运动的轨迹。表示位置的移动要有两个条件,一是要有位移的源位(source)和终点(goal),二是要有位移的方向。运动中动词的状态改变导致的空间方位的改变,其结果是空间关系的改变,因此,运动可以视为状态的改变,运动空间则是事物方位的改变。在“The ball lay on the ground”中,描述的是“ball”的静止状态,当它朝“box”运动时,“box”成为位移的目标,到达终点后,与“box”形成新的拓扑空间关系:

图2 The ball is rolling toward the box.(manner:motion)

图3 The ball lies beside the box.(manner:location)
图形、背景(参照物)是运动的要素,因此运动空间的语义识解实际上是理解图形与背景的运动关系。由于“语言使用相同的资源描述运动和静止,静态方位是来自运动的描述”(Levinson& Wilkins,2006:536),因此,运动可以看着是静态方位的延续,而静止则是运动发生后形成的拓扑空间关系。一个物体(图形)朝另一个物体(参照物体或背景)运动是基本的运动事件,运动或静止方位持续等情景都是“运动事件”,Talmy(2007:70-71)把这种基本运动事件进一步分为四个部分:图形、背景、路径和运动。路径是相对于背景的图形物体的随后路径图形本身所占有的场景,运动是其自身的呈现或在运动事件中的固定方位。根据格式塔心理学的语义理解方法,图形是移动的或概念上的可移动物体,它的关键点在路径和场景,背景是一个参照框架或参照框架内的静止参照物,借助背景,图形的路径和场景特点得以凸显。在图2中,球的源是从说话人视角看到的球的存在方位,运动目标是盒子,方位改变后形成图3中球与盒子之间的拓扑空间关系。因此,图2和图3分别表现了“运动事件”中以盒子为参照的图形移动路径和方向,以及“运动事件”结束后产生的新的拓扑空间关系。
运动事件导致方位的改变,而改变方位的动词常常是跨界动词(boundary crossing verbs)。英语中“go、come、enter、exit”这类指示运动方向的动词构成运动动词的核心部分,一般来说,观察者可以直接看到改变后的空间关系(9a),根据它们在论元结构(argument structure)中的语义识解,一般指示主语的源和目标(如图2)。有时候,跨界动词描述的空间关系改变要通过观察者的推理想象,观察者并不能直接看到动词描述的运动结束后的空间关系改变状态,这种空间关系由主语的目标确定(9b)。类似的还有定位运动动词如put、fall、throw等,它们是改变空间关系构型的动词,也是使动动词,通过描述运动使物体进入背景空间。
(9)a.The man is going to the house.
b.The man is going to the school.
4.结语
本文以空间语法的基本框架为基础,讨论空间认知和空间语言表征之间的关系,得到如下启示:
第一,由于空间认知的形式外化为语言时都是借助参照物对选定的物体进行空间和方位定位,空间描述首先借助参照框架,通过选择参照框架确定描述对象的空间方位。因此,参照框架是空间描述的基础。
第二,物体在空间中以两种状态存在,即动态和静态,也是空间语法所指的拓扑空间关系和运动空间关系。图形与背景的不同关系构成拓扑空间的不同结构层次,因此形成了典型的拓扑空间关系的基本方位结构。运动是状态的改变,运动空间则是事物方位的改变。在附目框架语言中,由于虚词起的作用,空间关系中的显性运动容易辨认,而大量的运动空间关系是隐性的,对空间关系的识解依赖推理和想像。
第三,静止和运动是相互交织的,运动改变了物体的拓扑空间关系,拓扑空间关系是运动的结果。
空间是一个宏大范畴,本文只是讨论了空间语法基本框架中空间认知和空间关系的表征,并没有穷尽空间范畴中的所有概念,如空间指示、时间参照中的空间概念等,因此空间语法研究的视野仍需继续拓展。
[1]Ameka,F.K.& S.C.Levinson.Introduction:The Typology and Semantics of Locative Predicates:Posturals,Positionals,and Other Beasts[J].Linguistics,2007,45(5/6):847–871.
[2]Couclelis,H.& N.Gale.Space and Spaces [J].Geografiska Annaler.Series B,Human Geography,1986,68(1):1-12.
[3]Croft,W.Some Contributions of Typology to Cognitive Linguistics[C]//Janssen,T.& G.Redeker.Cognitive Linguistics:Foundations,Scope,and Methodology.Berlin.New York:Mouton de Gruyter,1999,61 -93.
[4]Croft,W.& D.A.Cruse.Cognitive Linguistics[M].Cambridge:Cambridge University Press,2004.
[5]Evans,V.A Glossary of Cognitive Linguistics[Z].Edinburgh:Edinburgh University Press,2007.
[6]Frawley,W.Linguistic Semantics[M].New Jersey:Lawrence Erlbaum Associates.Inc.,Publishers,1992.
[7]Jackendoff,R.The Architecture of the Linguistic-Spatial Interface[C]//Bloom,P.et al.Language and Space.Cambridge,MA:The MIT Press,1999.
[8] Langacker,R.W.Space Grammar,Analysability,and the English Passive[J].Language,1982,58(1):22 -80.
[9]Langacker,R.W.Foundations of Cognitive Grammar Vol.I:Theoretical Prerequisites[M].北京:北京大学出版社,2004.
[10]Levinson,S.C.Language and Cognition:The Cognitive Consequences of Spatial Description in Guugu Yimithirr[J].Journal of Linguistic Anthropology,1997,7(1):98-131.
[11] Levinson,S.C.& P.Wilkins David.Grammars of Space:Explorations in Cognitive Diversity[C].Cambridge:Cambridge University Press,2006.
[12]Levinson,S.C.Space in Language and Cognition:Explorations in Cognitive Diversity[M].北京:世界图书出版公司,2008.
[13]Sellars,R.W.Space[J].Journal of Philosophy,Psychology and Methodology,1909,6(23):617-623.
[14] Talmy,L.Towards a Cognitive Semantics,Volume II:Typology and Process in Concept Structuring[M].Cambridge,MA:The MIT Press,2000.
[15] Talmy,L.Lexical Typology[C]//Shopen,T.Language Typology and Syntactic Description,Volume III:Grammatical Categories and Lexicon2ndedition.Cambridge:Cambridge University Press,2007.
[16] Tenbrink,T.Reference Frames of Space and Time in Language[J].Journal of Pragmatics,2011,43(3):704–722.
[17]Whorf,B.L.& J.B.Carroll.Language,Thought,and Reality[M].Cambridge,MA:The MIT Press,1964.
[18]马丁·海德格尔.时间概念史导论[M].欧东明,译.北京:商务印书馆,2009.
[20]齐沪扬.现代汉语的空间系统[J].世界汉语教学,1998,43(1):22-33.
[21]王寅.认知语言学[M].上海:上海外语教育出版社,2006.
[22]文旭,匡芳涛.语言空间系统的认知阐释[J].四川外语学院学报,2004,20(3):81-86.
[23]吴国盛.希腊空间概念的发展[M].成都:四川教育出版社,1994.
猜你喜欢
汽车工程师(2021年12期)2022-01-17 02:29:54
幼儿园(2021年12期)2021-11-06 05:10:20
当代陕西(2020年14期)2021-01-08 09:30:42
时代英语·高一(2019年1期)2019-03-13 10:29:48
时代英语·高三(2019年1期)2019-03-13 10:29:26
时代英语·高三(2018年1期)2018-02-23 19:33:53
新高考(英语进阶)(2017年10期)2017-12-23 09:15:06
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
