感应电机DTC转矩与磁链模糊PI自校正控制
2012-04-13 11:28佘致廷张红梅
电力系统及其自动化学报 2012年3期
佘致廷,张红梅,何 雯,陈 进
(1.湖南大学电气与信息工程学院,长沙 410082;2.湖南省长沙电业局,长沙 410015)
传统感应电机直接转矩控制DTC(direct torque control)在定子静止坐标系中实现磁链与转矩的估计,采用滞环式调节器直接控制磁链与转矩,系统中省去了坐标变换、脉宽调制器以及电流调节器等环节[1,2],因而,具有结构简洁、转矩动态响应快等优点,但存在电机低速时的电流和转矩脉动以及逆变器开关频率不固定等问题[3]。为了克服这些问题,目前采用的主要方法有:①增加细分的电压矢量和产生更精细的开关矢量表[4~6];②由能产生逆变器开关频率恒定的空间矢量脉宽调制SVPWM(space vector pulse width modulation)取代电压矢量表以降低电机低速转矩脉动[7~12]。在第一种方法中,文献[4]提出一种基于模糊逻辑的占空比控制器,该方法通过施加更多数目的电压控制矢量降低转矩脉动;文献[5]运用模糊逻辑理论产生细分的定子电压空间控制矢量,改善开关矢量表的控制性能;文献[6]通过改进开关矢量表,研究增加电压矢量的控制方法。在第二种方法中,其主要思路是采用SVPWM方法生成电压空间矢量,其磁链与转矩调节采用PI调节,由基本电压空间矢量合成任意大小和方向的电压控制矢量[7~9]。文献[7]采用磁链和转矩PI调节器取代传统DTC滞环式控制器,但传统PI调节器难以适应负载变化时的优化控制;文献[8]通过调整零矢量和有效矢量的作用时间和顺序,对SVPWM进行改进,降低电机低速时的转矩脉动。文献[9]研究基于磁链闭环控制的直接转矩控制-空间矢量调制DTC-SVM(direct torque control-space vector modulation)系统,由磁链调节误差产生合适的定子电压控制矢量。本文在文献[7]和[10,11]研究的基础上,研究基于模糊逻辑理论的感应电机DTC磁链与转矩控制,并将细分的12个电压空间矢量DTC-SVM控制策略引入到感应电机DTC模糊逻辑控制系统。
1 基于磁链与转矩模糊PI控制的DTC结构
本文研究的基于磁链与转矩模糊PI控制DTC基本结构如图1所示。

图1 基于磁链与转矩模糊PI控制的DTC基本结构Fig.1 DTC basic structure of flux and torque based on fuzzy PI control
图1中,采用磁链与转矩模糊PI自校正控制器取代传统DTC磁链与转矩滞环式控制器,定子旋转d-q坐标中输出的定子电压矢量U*sd和U*sq经坐标旋转反变换得到定子静止α-β坐标中的两个分量和,利用细分的12个电压空间矢量在每个采样周期合成任意方向和幅值的电压空间控制矢量。
感应电机DTC定子静止α-β坐标系的定子磁链与转矩估计器相应方程如下。
1.1 细分电压矢量的DTC-SVM控制
传统DTC采用6个非零电压空间矢量和两个零矢量,通过查表方式生成PWM,由于施加到电机的电压矢量数目较少,导致电流与转矩脉动。为增加电压控制矢量的数目以解决问题,本文将磁链空间扇区细分为12个扇区,将电压空间矢量也细分为12个电压空间矢量,其细分方法是:由6个基本电压矢量的角平分线方向合成得到6个新的电压矢量,这样得到在空间互差30°的12个电压空间矢量,利用这12个电压空间矢量合成所需的电压空间矢量。图2给出细分电压空间矢量与扇区。

图2 细分电压空间矢量与扇区Fig.2 Subdivision voltage space vector and the sectors
图3给出由细分的12个电压空间矢量合成所需电压控制矢量的合成。

图3 任意电压控制矢量的合成Fig.3 Synthesis of an arbitrary voltage control vector
图3中,电压矢量V2由基本电压矢量中的V21和V23合成,电压矢量Vref由相邻的两个电压矢量V1与V2以及零矢量V00与V70矢量合成,可表达为

式中:T00、T1、T2、T70为矢量V00、V1、V2、V70的作用时间;TS为采样周期。
为了计算T00、T1、T2、T70,按图2列出方程

采用以上算法,通过合理计算电压控制矢量的作用时间,可使得逆变器开关频率保持恒定。由于将传统6个电压空间矢量增加到12个电压空间矢量,增加了系统的算法执行时间,为此本文离线预先建立相应的12个电压矢量表,DSP仅需要少量的运算就可以完成这一算法。
在感应电机DTC定子旋转d-q坐标系中,定子磁链与转矩电压矢量及转矩方程
由式(12)~式(14)可推导出

从式(15)和式(16)可见,定子磁链幅值的变化和定子磁链的旋转速度分别受定子电压矢量U*sd和U*sq控制,而电机转矩的大小直接决定定子磁链的旋转速度,所以定子磁链的幅值和电机转矩的大小分别由定子旋转坐标系中的U*sd和U*sq决定,即实现了电机转矩和定子磁链的解耦控制。
1.2 磁链与转矩的模糊PI控制器
模糊PI自校正控制器的设计是一个关键问题,图4给出模糊PI自校正控制器的基本结构。

图4 模糊PI自校正控制器Fig.4 Self-tuning fuzzy PI controller
图4中,Xin是系统给定信号,Xf是系统反馈信号,y是模糊PI自校正控制器的输出信号。模糊PI自校正控制器以误差e和误差变化率ec为输入,以ΔKp和ΔKi作为输出。模糊PI自校正控制器的作用是通过不断的检测e和ec,根据模糊控制规则对ΔKp和ΔK进行实时调整。
由于磁链与转矩模糊PI自校正控制器的结构基本一致,这里仅研究转矩模糊PI自校正控制器的设计方法。
转矩PI参数调整的模糊控制器采用二输入二输出的形式。实验用电机功率为1.5 k W,额定转矩为9 N·m,定义转矩误差为

选取转矩误差的最大取值范围为额定转矩的50%,即e(k)的论域范围可选为-4.5~4.5 N·m,即[-4.5,4.5],将e量化为7个等级即将e的论域定义为{-3,-2,-1,0,1,2,3},量化因子ke=6/9。
转矩误差变化率的最大变化范围取值在额定转矩的30%以内,定义转矩误差变化率为

实验中周期性改变负载,可获得一定的转矩误差变化率,从而检验DTC系统对转矩波动的自适应调节能力。转矩误差变化率ec(k)的论域范围选-2.7~2.7 N·m即[-2.7,2.7],将ec也量化为7个等级即将ec的论域定义为{-3,-2,-1,0,1,2,3},量化因子kec=6/5.4。
控制器输出为ΔKP、ΔKi,KP取为12~26,Ki取为0.2~1.4;ΔKP的取值范围为[-6,6],则ΔKP量化为7个等级即ΔKP论域定义为{-3,-2,-1,0,1,2,3},量化因子ku=6/12;同时,ΔKi的取值范围为[-0.6,0.6],将ΔKi也量化为7个等级,其论域定义为{-3,-2,-1,0,1,2,3},量化因子为kv=6/1.2。
将E、EC、U和V均划分为{“正大(PB)”,“正中(PM)”,“正小(PS)”,“零(ZO)”,“负小(NS)”,“负中(NM)”,“负大(NB)”}7档,它们的隶属函数选择三角形状。
由于在每一个采样时刻,磁链与转矩都是利用模糊PI自校正控制器进行调节控制,所以,磁链与转矩的误差始终较小,相对于传统DTC通过查表选择基本电压空间矢量的控制方式,该方法可以更精确地控制磁链与转矩,较好消去磁链与转矩误差,降低磁链、电机转矩和定子电流的脉动,获得较优的转矩控制效果。
2 仿真与实验研究
在Matlab7.8/Simulink环境下建立改进的DTC仿真模型[12]如图5所示。
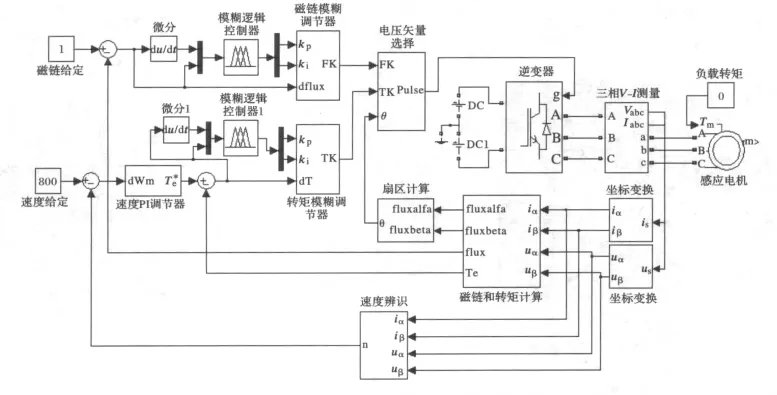
图5 改进的DTC仿真模型Fig.5 Simulation model of modified DTC
为了探讨DTC系统转矩静动态响应性能,分别对基于模糊PI自校正控制的感应电机DTC系统与传统DTC系统的控制性能进行仿真研究。电机参数为:Pn=1.5 k W,Un=380 V,fn=50 Hz,nn=1400 r/min,J=0.0267 kg·m2,pn=2,Lm=0.363 H,Lr=0.386 H,Ls=0.398 H,Rr=12.31Ω,Rs=10.28Ω,Lm=81.36 m H。
DTC系统高速时定子电阻变化等因素对系统控制性能影响较小,这里仅给出DTC系统电机低速ng=50 r/min且转矩给定从+7 N·m突变为-7 N·m时,传统DTC系统和基于模糊PI自校正控制DTC的转矩响应仿真曲线如图6和图7所示。
由图6和图7可以看出,转矩给定从+7 N·m突变为-7 N·m时,基于模糊PI自校正控制DTC系统在低速时有一定的自适应调节能力,转矩的动态响应特性优于传统DTC转矩的动态响应,在稳态时,改进DTC系统的低速转矩脉动有较大改善。
为了验证以上理论研究的正确性,本文建立基于DSP芯片DSPIC6010A组成的DTC开发平台如图8所示。
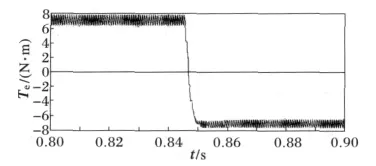
图6 传统DTC转矩响应Fig.6 Torque response curve of traditional DTC

图7 改进DTC转矩响应Fig.7 Torque response curve of modified DTC
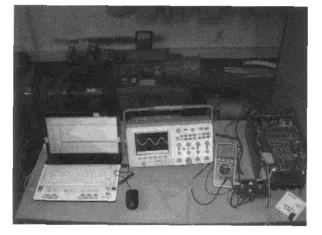
图8 感应电机DTC开发平台Fig.8 Development platform for induction motor DTC
实验用感应电机参数与仿真参数一致,设定的控制系统主要参数:DTC主程序循环周期为80 μs;DSP的指令周期为33.9 ns;DTC开关频率为10 k Hz。
图9和图10给出了转矩给定为Tref=6 N·m时,传统DTC和基于磁链与转矩模糊PI自校正控制的DTC转矩稳态特性曲线。
由图9和图10可以看出,传统DTC转矩脉动较大,而改进DTC转矩稳态性能较好,其转矩仅在给定值±0.5 N·m上下波动。
图11和图12给出定子磁链幅值给定为Ψref=1.1 WB时,传统DTC和改进DTC定子磁链幅值波形。

图9 传统DTC转矩稳态响应Fig.9 Steady-state torque response of traditional DTC

图10 改进DTC转矩稳态特性Fig.10 Steady-state torque response of modified DTC

图11 传统DTC定子磁链幅值波形Fig.11 Stator flux amplitude waveformof traditional DTC
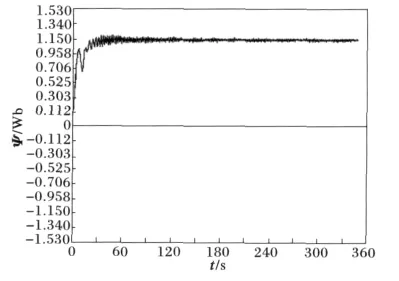
图12 改进DTC定子磁链幅值波形Fig.12 Stator flux amplitude waveform of modified DTC
从图11可以看出,传统DTC的定子磁链幅值响应有一定的超调并存在静态误差,而图12中定子磁链幅值的动态响应性能得到较大改进且静态误差较小,进一步验证改进DTC具有较好的定子磁链动态校正能力和跟踪定子磁链幅值变化能力,证明了改进DTC控制方法的正确性和有效性。
3 结语
本文将磁链与转矩模糊PI自校正控制器替代传统DTC磁链与转矩滞环式调节器,并研究了细分矢量DTC-SVM控制方法,获得了优化的磁链与转矩误差跟踪控制。仿真与实验结果表明:采用磁链与转矩模糊PI自校正控制的DTC系统增强了对扰动的自适应能力,静态时电机转矩脉动有所降低,磁链与转矩的动态响应性能得到改善。
[1] Depenbrock M.Direkte selbstregelung(DSR)fuhrhochdy-namische Drehfeld-antriebe mit[J].Stromrichterspeisung ETZ Archiv,1985,7(7):211-218.
[2] Takahashi I,Noguchi T.A new quick-response and high-efficiency control strategy of an induction motor[J].IEEE Trans on Industry Applications,1986,22(5):820-827.
[3] Buja G S,Kazmierkowski M P.Direct torque control of PWM inverter-fed AC motors-A survey[J].IEEE Trans on Industrial Electronics,2004,51(4):744-757.
[4] Srinivasa Babu Kishore Y,Tulasi Ram Das G.Improvement in direct torque control of induction motor using fuzzy logic duty ratio controller[J].ARPN Journal of Engineering and Applied Sciences,2010,5(4):68-74.
[5] Toufouti R,Meziane S,Benalla H.Direct torque control for induction motor using fuzzy logic[J].ACSE Journal,2006,6(2):19-26.
[6] Domenico C,Francesco P,Giovanni S,et al.FOC and DTC:Two viable schemes for induction motors torque control[J].IEEE Trans on Power Electronics,2002,17(5):779-786.
[7] Xue X,Xu X,Habetler T G,et al.A low cost stator flux oriented voltage source variable speed drive[C]∥IEEE Industry Applications Society Annual Meeting.Seattle,USA:1990.
[8] Lai Y-S,Chen J-H.A new approach to direct torque control of induction motor drives for constant inverter switching frequency and torque ripple reduction[J].IEEE Trans Energy Conversion,2001,16(3):220-227.
[9] Casadei D,Serra G,Tani A,et al.Performance analysis of a speed-sensorless induction motor drive based on a constant-switching-frequency DTC scheme[J].IEEE Trans on Industry Applications,2003,39(2):476-484.
[10]佘致廷,肖岸文,孙炜,等(She Zhiting,Xiao Anwen,Sun Wei,et al).基于MRAS理论的无速度传感器直接转矩控制调速系统(Speed adjustable system of sensorless direct torque control for induction motor based on the MRAS scheme)[J].电工技术学报(Transactions of China Electrotechnical Society),2006,21(4):98-101,67.
[11]佘致廷,陈文科,刘娟,等(She Zhiting,Chen Wenke,Liu Juan,et al).一种新的全桥软开关变换器PWM实现方法(Novel realization method of full-bridge soft-switching converter PWM)[J].仪器仪表学报(Chinese Journal of Scientific Instrument),2010,31(9):2010-2015.
[12]顾德英,季正东,张平(Gu Deying,Ji Zhengdong,Zhang Ping).基于SIMULINK的异步电机的建模与仿真(Modeling and simulation of asynchronous motors based on SIMULINK)[J].电力系统及其自动化学报(Proceedings of the CSU-EPSA),2003,15(2):71-73.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年10期)2016-04-12
新高考·高一物理(2016年1期)2016-03-05
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年23期)2014-04-04