一种数据链传输延迟建模及其补偿方法
2012-03-19 08:22:32冯忠华王新龙
北京航空航天大学学报 2012年8期
冯忠华 王新龙 王 彬
(北京航空航天大学 宇航学院,北京 100191)
数据链作为各作战单元之间进行信息传输的通信链路,是实现协同制导的关键环节[1-4].通过数据链,将各作战单元有机结合为一体,实现了各作战平台之间信息共享、统一指挥,协同攻击及远程精确打击,从而能够大幅度提高作战效能.然而,由于数据的发送、传输和处理需要一定的时间,因此,当目标信息由一个作战单元传送给另一个作战单元时,由于数据传输延迟,使接收到的目标信息产生误差[5-7].美国先进 AIM-120D 超视距空空导弹与数据链相结合使用,使得预警机探测,引导载机发射,并协同友机制导的攻击方式(即所谓的第3方制导)已成为可能[2].
鉴于此,本文对协同制导过程中的数据链传输延迟误差进行了建模,并提出了一种基于“当前”统计模型的数据传输延迟误差补偿的自适应卡尔曼滤波方法.
1 数据传输延迟分析及建模
1.1 数据传输延迟分析
消息传输时间延迟是指从发送站产生消息到接收站接收到消息这两个时刻之间的时间间隔.消息在一个作战单元生成后首先存储到缓冲区,若系统空闲,并且作战单元中的可用服务时隙到达时就接受服务,否则按先到先服务的顺序排队等待接受服务.消息服务完后通过天线发送出去,以电磁信号的形式在介质中进行传播.另一个作战单元的接收站接收消息,这样就完成了数据传输.
由数据传输过程可知,数据在传输过程中产生的时延td主要由排队等待时间Wq、系统服务时间Ws和消息传播时间Wp构成[5],即

目前,各作战单元之间的通信距离一般在550 km范围内,因此,数据的最大传播时间Wp大约为1.83ms.如果目标飞行速度为500m/s,这时目标在数据传播时间内的运动距离为0.915m,此时目标位置误差远小于雷达的测量精度,因此,传播时间Wp一般不作考虑.
消息服务时间Ws是指作战单元开始对消息进行服务直到完成服务所需的时间,如果消息仅由一个数据包组成,则消息服务时间可表示为分配给作战单元中两时隙之间的时间间隔,即

式中,n为分配给作战单元可用服务时隙中两时隙之间的时隙数;τ为时隙大小.
由于消息只有在作战单元所分配的时隙中才能传输,当消息到达时,它不仅要等比它先到发送队列的消息传送完毕,而且还要等作战单元中可用服务时隙的到来.因此,消息等待时延Wq是影响数据传输延迟的主要因素.
1.2 数据传输延迟建模
时分多址(TDMA,Time Division Multiple Access)作为一种有效的多址接入方式在数据链传输系统中得到了广泛应用.设在一个TDMA系统中有N个作战单元,消息传输时间被分成连续的时帧,每个时帧又由连续的时隙组成.令τ为时隙大小,M为每帧中的时隙数,则时帧长度TF=Mτ.作战单元中传输的消息是由一个或多个固定长度的数据包组成,并且每个数据包仅需一个时隙即可发送完毕.如果作战单元i在一个时帧中分配的时隙数ni=1,则其每隔M个时隙传送一个数据包.
N(t)表示t时刻作战单元中的消息队长,其概率分布可表示为

概率母函数为

若消息到达时系统空闲,则消息中第一个到达数据包的服务时间服从参数为TF/M到TF+TF/M的随机分布,设其分布为B^(t),一阶矩和二阶矩分别为b^1,b^2;而消息中随后到达的数据包服务时间为TF,设其服务时间分布为B(t),一阶矩和二阶矩分别为b1,b2.假设作战单元中第n个消息由Fn个数据包组成,且{Fn,n≥1}是独立同分布的,其一阶矩和二阶矩分别为Fn1和Fn2.并且第n个消息的服务时间为Sn(t),则{Sn(t),n≥1}也是独立同分布的.
假设作战单元中消息的生成服从参数为λ的Poisson过程,根据消息服务时间分布以及消息先到先服务的规则,可以将消息传输过程抽象为一个排队系统,进而利用排队理论来分析数据传输时间延迟.因此,当 λb1<1 时,有[8]
式中,B*(s),B^*(s)是消息服务时间分布的拉普拉斯—斯蒂尔切斯变换;P(z)是作战单元中消息数为n的概率母函数;P0是上式在z=1处得到的.
进一步,根据文献[8]可得
则,消息传输延迟为

式(8)给出了作战单元在每个时帧内仅分配一个时隙时产生的消息传输延迟,将该结论进行推广,即作战单元在每个时帧内分配多个时隙,并且分配的时隙位置在时帧中是均匀分布.设作战单元i(1≤i≤N)在每个时帧中分配的时隙数为 ni,则将式(8)中的用代替,可得
根据TDMA协议[5],假设每条消息仅由一个数据包组成,即Fn1=Fn2=1.再根据式(9),可得到消息到达率λ和服务率μ与传输延迟时间的变化情况(其中μ为服务时间的倒数),如图1和图2所示.可以看出,传输延迟时间与消息的服务率μ和到达率λ有关:当λ一定时,延迟时间随着μ增大而减小;当μ一定时,延迟时间随着λ增大而增大;当λ=μ时,传输延迟时间急剧增大.
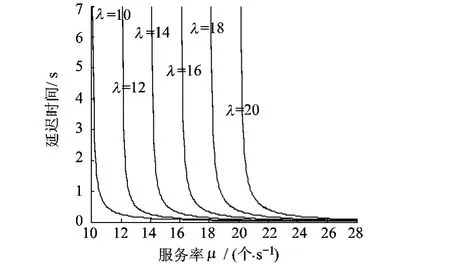
图1 延迟时间随消息服务率μ的变化情况
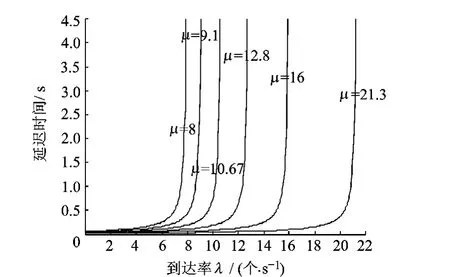
图2 延迟时间随消息到达率λ的变化情况
2 数据链延迟补偿方法
2.1 机动目标运动模型
对于机动目标来说,目标下一时刻的位置是未知的,因此需要建立更合理、更准确的机动目标的运动模型来描述目标的运动.由于当目标以某一加速度机动时,下一时刻目标加速度的取值只能在“当前”加速度的邻域内.因此,通常采用“当前”统计模型来描述机动目标的运动[9].
由于目标的随机机动加速度在时间轴上符合一阶时间相关过程(目标在3个方向上的运动是相互独立的,因此仅对x方向进行分析):

根据式(10),可得直角坐标系下表示的目标运动的状态方程为

式中,Q0是与α和采样周期T有关的常量矩阵.
展开式(11),取其第3个分量,可得

对式(13)两边再取均值,则有
式中,zk为到当前时刻为止目标的所有量测值;a^(k)为目标“当前”加速度的预测值.
接着,利用目标机动加速度与相邻采样时刻目标位置变化之间的关系对Q(k)阵进行自适应调整[10].由于目标在k-1时刻与k时刻的位移Δd与其加速度的变化量Δa之间的关系为

而Δd又可表示为

因此,由式(15)、式(16)可得
另外,目标当前机动加速度a(k)可表示为当前加速度的均值与两采样时刻间隔之间加速度的变化Δa之和,即

并且,由于当前机动加速度a(k)服从修正的瑞利分布[10],则可得到

取目标在地球直角坐标系下的位置x为量测量,则机动目标的量测方程为

式中,H(k)=[1 0 0]是观测矩阵;V(k)是均值为0;方差为R(k)的观测噪声.
2.2 基于自适应卡尔曼滤波的数据传输延迟误差补偿方法
采用机动目标预测算法,根据k+td时刻得到的目标信息Z(k),通过自适应卡尔曼滤波跟踪算法可得到k时刻目标信息的估计值X(k).
此时,目标量测信息的预测值为

而目标在信息传输延迟时间间隔td内移动的距离可表示为
从而,可得到k+td时刻延迟补偿后的目标信息为

3 仿真验证与分析
目标的仿真条件设定为:目标初始位置为[100;6;80]km,初始速度为300m/s,初始航迹倾角为0°,航迹偏角为150°;目标采用的机动方式为:目标先匀速直线飞行,10 s后以8 g的加速度右转弯机动,转过90°后匀速直线飞行,10 s后再以8g的加速度左转弯机动,转过90°后匀速直线飞行,10 s后再以2 g的加速度爬升飞行,当俯仰角为45°时再以2 g的加速度改平飞行,最后目标在水平面内平飞.仿真中目标的机动频率α=0.05,采样周期T=1 s,仿真时间80 s(其中前30 s为预警机探测目标信息,后50 s为友机探测目标信息).
数据传输过程中目标信息的传输延迟除了受信息的排队等待时间、系统服务时间、消息传播时间等因素的影响外,还会受到作战单元对目标信息的处理以及算法运行时间等误差因素的影响,使得数据传输延迟时间具有随机性,并服从均匀分布.因此,总的延迟时间td可设定为0.5 s到1 s的随机数[11].
采用机动目标3个方向的位置、速度和加速度作为目标的状态变量,对目标的状态进行估计,再根据式(22)对目标的测量信息进行延迟补偿,计算得到延迟补偿前、后目标的量测信息.将补偿前、后的目标测量值与目标真实的测量值之差作为目标信息的测量误差,仿真结果见图3~图5.
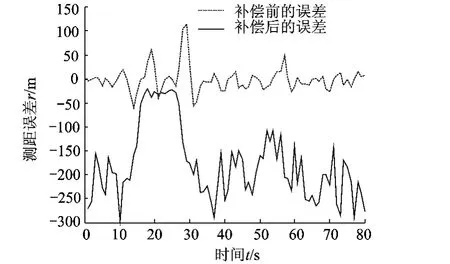
图3 目标距离测量误差
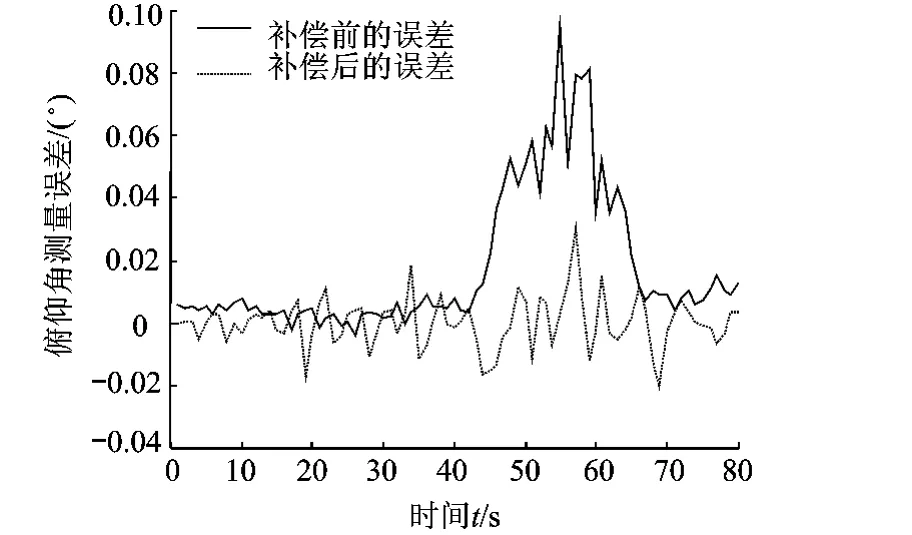
图4 目标俯仰角测量误差
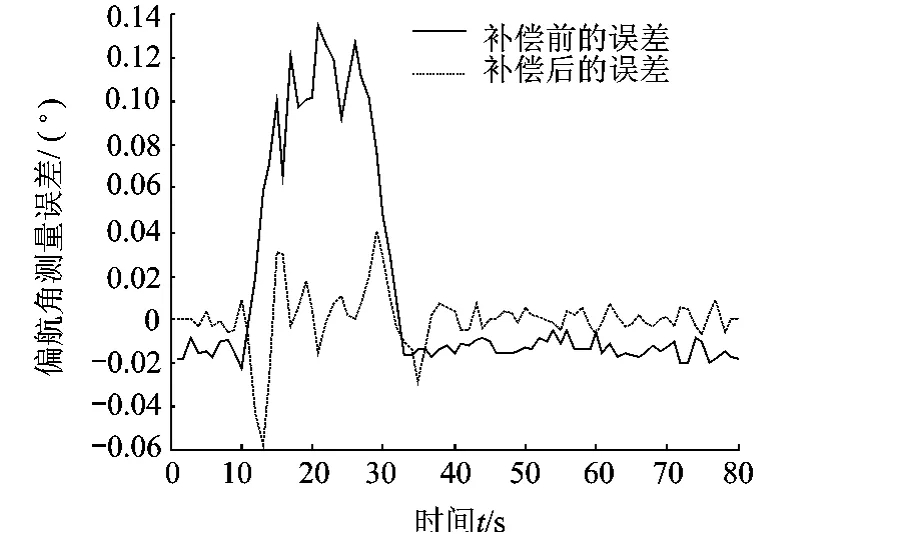
图5 目标偏航角测量误差
由图3~图5可看出,数据延迟补偿前目标测量误差很大,经延迟补偿后误差明显降低,位置测量误差最大减少307.268 9m,俯仰角测量误差最大减少0.0926°,偏航角测量误差最大减少0.1506°.可见,延迟补偿后的目标信息更接近于目标的真实运动信息.
进一步,采用蒙特卡罗方法对数据链传输延迟补偿前后导引头对目标的截获情况进行分析.
蒙特卡罗仿真条件为:导弹初始位置为[0;5000;0]m,初始速度为300m/s,初始弹道倾角10°,弹道偏角 - 30°;友机初始位置为[1 000;6000;2000]m,初始速度为[0;0;-200]m/s;目标位置测量误差为100m;导引头天线3 dB波束宽度为4°,蒙特卡罗仿真次数为200,截获时弹目距离小于20 km.
根据目标截获时的导弹信息、目标的真实信息以及数据传输延迟补偿前、后的目标信息可以得到补偿前、后的目标截获概率,如图6所示.
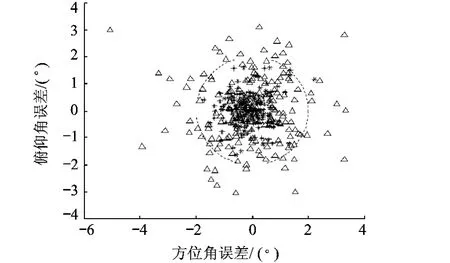
图6 目标在导引头视场中的分布
图6中,虚线代表导引头视场的范围,目标落在导引头视场范围内时表示可以被截获,否则不能被截获.根据200次蒙特卡罗仿真实验结果,延迟补偿前目标在导引头视场中的分布范围较大,其中有154次落在导引头视场范围内,这种情况下目标截获概率为77%;而延迟补偿后目标在导引头视场中的分布比较集中,有198次落在导引头视场范围内,此时目标截获概率为99%.可见,目标测量信息经延迟补偿后能够大大提高中末制导交班时导弹对目标的截获概率.
4 结论
通过对数据传输延迟过程进行分析,建立了数据传输延迟模型,并利用目标机动“当前”统计模型与自适应卡尔曼滤波器相结合对数据链传输延迟误差进行了补偿,可以得到以下结论:
1)数据在传输过程中产生的时延主要由排队等待时间、系统服务时间和消息传播时间构成.其中,系统服务时间和排队等待时间是影响数据传输延迟的主要因素.
2)利用机动目标加速度与相邻采样时刻目标位置估计变化之间的关系,可实现对系统噪声方差阵的自适应调整.
3)根据目标测量信息的预测值以及数据传输延迟间隔,利用自适应卡尔曼滤波可递推得到延迟误差补偿后的目标信息,实现对目标信息传输延迟误差的补偿.
References)
[1]李林森,于海勋,韩志刚,等.论协同空战及其关键技术[J].电光与控制,2000(1):29-34 Li Linsen,Yu Haixun,Han Zhigang,et al.The discussion of cooperative air combat and its key technology[J].Electronics Optics& Control,2000(1):29 -34(in Chinese)
[2]童明成,张凤霞,贺建良.网络环境下空中多平台联合攻击作战方式[J].电光与控制,2009,16(5):19 -22 Tong Mingcheng,Zhang Fengxia,He Jianliang.Aerial multi-platform joint-attack warfare modes in network environment[J].Electronics Optics & Control,2009,16(5):19 -22(in Chinese)
[3]刘志华,季海波.数据链技术在战术武器中的应用方案研究[J].航天控制,2009,27(3):61 -64 Liu Zhihua,Ji Haibo.Study of application project of data link technologies in tactical weapons[J].Aerospace Control,2009,27(3):61-64(in Chinese)
[4]张斌,黄俊,寇英信,等.双机合作下的远程空空导弹攻击技术[J].火力与指挥控制,2009,34(5):92 -94 Zhang Bin,Huang Jun,Kou Yingxin,et al.Research on technology of long-range air-to-air missile attacking by two cooperative fighters[J].Fire Control & Command Control,2009,34(5):92-94(in Chinese)
[5]任培,周经伦,罗鹏程,等.JTIDS信息传输时间延迟分析[J].计算机工程,2008,34(21):23 -25 Ren Pei,Zhou Jinglun,Luo Pengcheng,et al.Time delay analysis of JTIDS message transmission[J].Computer Engineering,2008,34(21):23 -25(in Chinese)
[6] Mitchell G E,Gander J F.Impact of time delays on the JTIDS network[C]//IEEE National Aerospace and Electronics Conference.Dayton,OH,USA:IEEE,1990:440 -445
[7] Rubin I.Message delays in FDMA and TDMA communication channels[J].IEEE Transactions and Communication,1979,27(5):769-777
[8] Lam SS.Delay analysis of a time division multiple access(TDMA)channel[J].IEEE Transactions on Communication,1977,25(12):1489-1494
[9]樊宗臣,吴晓燕.机动目标跟踪的自适应卡尔曼滤波算法实现[J].战术导弹技术,2009(1):79-81 Fan Zongchen,Wu Xiaoyan.Study of adaptive kalman filtering algorithm in maneuvering target track[J].Tactical Missile Technology,2009(1):79 -81(in Chinese)
[10]胡振涛,刘先省.基于“当前”统计模型的一种改进机动目标跟踪算法[J].山东大学学报,2005,35(3):111 -114 Hu Zhentao,Liu Xianxing.An improved maneuvering target tracking algorithm based on the“current”statistical model[J].Journal of Shangdong University(Engineering Science),2005,35(3):111 -114(in Chinese)
[11]吴龙,刘正敏,姜长生,等.基于卡尔曼滤波算法的数据链延时补偿[J].航空兵器,2010,(5):14-17 Wu Long,Liu Zhengmin,Jiang Changsheng,et al.Data link delay-time compensation based on Kalman filtering algorithm[J].Aero Weaponry,2010,(5):14 -17(in Chinese)
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:52
通信产业报(2020年43期)2020-01-15 06:38:43
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
铁道通信信号(2018年9期)2018-11-10 03:26:46
舰船电子对抗(2016年3期)2016-12-13 05:15:55
广西大学学报(自然科学版)(2016年5期)2016-11-12 06:28:54
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
中国卫生(2014年12期)2014-11-12 13:12:26
中国卫生(2014年8期)2014-11-12 13:00:50