功率电传作动系统用电机关键技术及其发展趋势
2012-02-22 08:21杨小辉马尚君佟瑞庭
微特电机 2012年5期
关 栋,杨小辉,刘 更,马尚君,佟瑞庭
(西北工业大学,陕西西安710072)
0 引 言
随着未来飞行器和武器装备全电化的发展趋势[1],功率电传[2-3]作动系统将成为飞控系统新型舵面执行机构。功率电传是指飞行器的功率从次级能源系统通过导线以电能量方式传至各执行机构。主要形式有两种:电动静液作动器(Electro-Hydrostatic Actuator,EHA)和机电作动器(Electro-Mechanical Actuator,EMA)。与传统的液压作动系统相比,功率电传系统具有以下优点:
(1)提高战伤生存能力;
(2)改善飞机的飞行品质;
(3)提高飞机的可维护性;
(4)降低对地面保障设施的要求;
(5)利于实现随控布局设计;
(6)避免由于液压油泄漏造成火灾的可能性。
此外,功率电传作动系统还具有体积小、重量轻、可靠性高、效率高、结构相对简单、减小易攻击机身面积等优点[4]。
功率电传作动系统在飞行控制技术中将是一个主要的技术突破口,高性能的电机设计、制造及其控制技术又是功率电传作动系统的核心技术[5]。随着飞行器多电化与全电化的发展趋势,功率电传作动系统将逐步替代传统的液压系统使得飞机采用电能作为二次能源。由于高性能永磁材料和功率电子学的发展,发展功率电传作动系统将成为可能[6]。
与传统的电励磁电机相比,永磁电机特别是稀土永磁电机除了具有结构简单、运行可靠、体积小、质量轻、损耗小、效率高、电机的形状和尺寸可以灵活多样等显著优点[7]以外,还具有响应快、便于实现多余度控制等特点,因此更适合于对性能、体积、重量、速度有特殊要求的航空领域。
1 稀土永磁电机在功率电传作动系统中的应用现状
稀土永磁电机具有以下优点:
(1)稀土永磁材料具有较高的磁能积。输出功率相同的情况下,电机的质量可减少30%;体积相同时,功率可增大50%。而在现代航空飞行器的设计中,首先要考虑的两个问题就是设备的重量和体积。
(2)剩磁Br大,能获得较高的气隙磁通密度。气隙磁通密度的增大可以进一步减小电机的转子尺寸,从而获得优良的动态特性。
(3)高矫顽力Hc能够降低退磁风险。磁钢可以加工成不同形状,满足转子外形设计成不同的形状要求,以适应于高速运行的功率电传作动系统电机需要。
(4)热稳定性好(主要指稀土钐钴)。电机工作可靠,无最低工作温度极限,最高工作温度可以达到250℃。
(5)稀土永磁材料拥有比较优越的力学特性,故其能较好地工作在振动、冲击负荷比较大的功率电传作动系统中。
(6)便于计算机精确控制。电机便于采用计算机进行精确操控,以便更好地发挥飞机的整体性能。
由于电工电子技术、控制策略与方法、电机理论的发展,材料加工技术逐步完备,功率电传作动系统用稀土永磁电机的性能必将在原有水平上不断提高[8-11]。
上世纪末,美国对功率电传作动系统用电机的进行了一系列的研究与开发。它们采用高性能的钕铁硼作为磁性材料制备了无刷直流电动机,并将其作为电动静液作动器的动力源。此电机为高压、直流供电,并应用脉宽调制技术,通过控制器采集飞控计算机所发出的控制指令,采用三通道舵回路系统伺服放大器对信号处理、传输,经放大后的信号驱动作动器并实现对舵面的驱动,最终实现飞控系统对飞机飞行的自动控制。
目前,作为功率电传作动系统驱动元件的稀土永磁电机主要有三种:有刷直流电动机、步进电动机、无刷直流电动机,而且都有比较广泛的应用。印度一般采用混合式步进电动机、无刷电动机,美国采用有刷电动机及无刷直流电动机较多,国内则主要采用步进电动机和无刷直流电动机[12]。无刷直流电动机因不采用电刷进行机械换向而将寿命由传统的几百小时提高到1 000~2 000 h,可以进一步提高转速、增加可靠性和降低重量而且便于实现余度控制。因此被公认为飞控系统最有发展前景的一类电机。
西北工业大学工程设计与仿真研究所正在研制2 kW、18 000 r/min的飞控系统用无槽无刷稀土永磁电机。该电机与传统的有槽电机相比,效率高、功率密度大、过载能力强且运行平稳。
2 功率电传作动系统用稀土永磁电机关键技术
2.1 高性能的新型材料
要发展大功率、高集成、安全可靠的一体化功率电传作动系统,需要研究和解决高性能永磁材料、大功率半导体器件、微处理器、稀土永磁电机设计制造等技术[13]。
2.1.1 高性能稀土永磁材料
功率电传作动系统一直未能成为飞控系统舵面的主要执行机构,其主要的原因之一就是高性能的永磁材料的缺乏。新型永磁材料将进一步减轻作动系统的重量[14-16]、提高其性能,还能改善由于高温、闪电、电磁脉冲等强磁场引起的失磁作用[17]。在高温或低温的情况下稀土永磁材料的特性将会发生变化。一般情况下磁钢的工作温度不超过105℃,最高不超过150℃[18]。而国内已经开发出150 W、3 000 r/min、工作在200~300℃高温的三相四极稀土永磁电机,其直径105 mm、长145 mm。电机采用高温特性好的稀土材料Sm2Co7磁钢以及金属和陶瓷系的无机材料为主的结构材料[19]。目前正在研究新的更高性能的永磁材料,如钐铁氮永磁、纳米复合稀土永磁等,将会有新的更大的突破[20]。
2.1.2 耐高温、高效的大功率集成半导体器件
目前,大功率绝缘栅双极晶闸管IGBT正朝着耐高压、高容量(3.3 kV、1 200 A)、低损耗、高速开关的方向发展。NASA Lewis研究中心研究成功工作温度200℃的逆变器[18]。第四代 IGBT已经问世,它具有开关期间发热少、电流输出波形优化等特点;并能够实现降低驱动功率、减小体积、实现电机运行静音化的目标。这些新型大功率器件的采用将能够进一步提高电机的可靠性、有效地实现功率变换和精确控制[17]。
此外,稀土电机特别是高速稀土永磁电机的机壳、端盖等零部件都将采用高强度轻合金(铝镁合金)制成,在满足强度要求的情况下尽量制成空心结构。正是这些高性能的新型材料的使用,才使得稀土永磁电机体积更小、质量更轻,并且能够更好地满足功率电传作动系统的要求[21]。
2.2 高频响、小惯量
功率电传作动系统一般由高速电机驱动,通过齿轮减速机构减速后由滚柱丝杠副或滚珠丝杠副执行。在电机功率一定的条件下,其速度越高则其体积越小[22]。由于机电作动系统要求超调小、响应快、抗负载干扰能力强、实时性好,一般要求其驱动电机的机电时间常数要小,即系统频响高[23]。因此多采用高速伺服电机,其可以从马歇尔空间飞行中心研制的两代火箭TVC用EMA上得到体现。其中第一代EMA,如图1(a)所示,采用空载转速为9 300 r/min,供电电压为270 V(DC)的2台无刷直流电动机。第二代EMA,如图1(b)所示,采用空载转速为20 000 r/min,供电电压为230 V(DC)的4台三相无刷直流电动机。
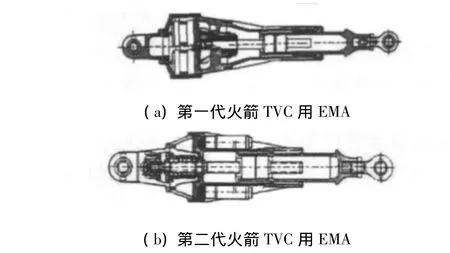
图1 马歇尔空间飞行中心研制的两代EMA
2.3 高可靠性
目前,国内外的电机可靠性技术的研究均进展迅速。一般可将其分为两个层次,第一层次的标志为冗余技术,另一层次的标志为容错技术[24]。国内西北工业大学和北京航空航天大学高校对双余度永磁电机及其控制系统开展了相关研究工作。
2.3.1 双余度电机本体结构
余度[25]是指使用两套或两套以上的设备来完成给定的任务,即构成余度。串联式结构和并联式结构为双余度电机驱动系统主要的两种结构形式,如图2所示。

图2 双余度电机结构形式
串联式双余度结构如图2(a)所示。有两套相互独立的线圈绕组、一对转子、两个位置传感器和共用的电机转子轴构成。由于此结构中两套绕组分别绕制,相距较远,因此磁耦合现象很弱,控制系统也不复杂。但本质上是由两台电机串联组成的,因此体积较大。当其中一个电机出现故障时,其中一台就会成为另一台电机的负载,导致其机电时间常数上升,动态特性下降。另外转子共轴的结构会发生力矩扭转导致轴承的寿命缩小,所以这种结构较少采用。
图2(b)为并联式双余度结构。它是由两套线圈绕组组成的,每个线圈绕组相差30°的电角度,一对位置传感器和单个转子组成。与图2(a)相比,系统的长度变小。由于空间狭小,所以线圈绕组绕制繁琐,同时绕组间不可避免地出现磁耦合现象,造成了控制系统比较复杂。
从可靠性角度看,飞控系统机电部件的故障率为60×10-6/飞行小时,电子线路的故障率为150×10-6/飞行小时[26]。因此采用2套电子线路较为合理,相应电机要采用双电枢绕组方案[27]。所以应采用并联式的双余度结构。
2.3.2 双余度电机控制系统
双DSP双余度控制系统和单DSP双余度控制系统是当前电机余度控制系统的两种主要方式[25]。本质都是通过备份的方式来实现容错的。
为了克服电机的双余度控制技术所存在的系统利用率不高、电流不均衡等问题,研究者提出了一种新型的非备份式容错技术。尽管这种电机只有单一的绕组和控制器,但是其可以达到可靠性的要求[28-32]。
1996年,英国的LUCAS公司和Shfield大学的教授合作,研究并开发了永磁容错电机。将其应用于功率电传作动系统中,显示了这种类型的电机在飞控系统中广阔的应用前景[33-37]。
目前国内对永磁容错电机和相关的控制系统研究不是太多,西北工业大学对这种电机进行了一些论述[37]。但一些高校对其他类型的电机及控制器进行了容错设计,特别是对异步电机及其控制器的容错性开展了详细的研究。2000年前后清华大学提出了异步电机的容错集成系统[38]。两年后南京航空航天大学提出了基于直接转矩控制的异步电机容错系统[39-41]。
2.4 其它
功率电传作动系统用稀土永磁电机日益向高速化发展,但是其转子仍然采用油润滑滚动轴承支撑。这种轴承存在着难冷却、易过热、寿命短、难维护等缺点。高性能的空气动压轴承会在原有的摩擦表面间形成空气垫层,因此可以免去油润滑和定期检修,使电机转速可以大幅提高。这种应用空气箔片的动压轴承在B2、F-18、SAAB-2000等机型上均采用过。
3 功率电传作动系统用稀土永磁电机未来发展趋势
3.1 电机新技术
3.1.1 高压化、直流化、无刷化
从飞机供电系统的发展趋势看,未来军用飞机倾向于采用270 V高压直流电源系统如F-22、F-35等[42]。多电飞机要求系统具有高可靠性、高容错性、高功率密度等,而航空高压直流电机是多电飞机的关键技术之一[43]。
我国现役飞机的飞控系统多采用有刷低压直流电机。由于此电机采用电刷接触的换向方式,造成其存在电刷和换向器间产生摩擦火花并磨损、电磁噪声干扰、可维修性不好等缺点。所以这种电机的寿命己经不能满足现代战争的需要,迫切需要更新换代[44]。
国外军用飞机的功率电传作动系统逐步采用高压无刷直流电机代替传统的低压有刷电机作为动力源,如美国的“全球鹰”等。
3.1.2 结构工艺革新与机身一体化
未来飞行器尤其是战斗机和高超音速飞行器要求翼面变小变薄,操纵面附近的空间非常紧张,如果安装体积较大的作动器,对飞行器外形和结构的破坏可能会把体积减小的优势抵消[45]。
文献[46-47]描述了一种电机直接驱动机翼的飞行控制方法。这种电机可以在一定转角内实现对飞控舵面的准定位和驱动。其具有一定转角内转矩大、频响高、精度好、所占空间小、重量轻等优点。电机本体由双余度的定子系统和转子构成,控制系统和电机的定子绕组一样,采用双余度控制线路进行控制。
这种直接驱动方式的采用可以明显减小飞控系统的体积、减轻重量、提高容错能力和可靠性。另外省去了齿轮减速机构和执行装置,系统还具有以下优点:
(1)减少零部件数量;
(2)减小故障概率,提高可靠性;
(3)提高系统效率;
(4)减小整个飞控系统的惯性。
3.1.3 高功率重量比
为了满足未来军事和商业的需要,目前飞控系统用电机的功率密度正在向大于置2.2 kW/kg的方向努力[48]。
(1)无铁心永磁电机的采用
无铁心永磁电机[8]充分利用永磁材料的优异磁性能,少用或不用硅钢片。在磁路结构上采用聚磁型无铁心结构,可以避免铁耗,而且能够超高速运转。
(2)无槽无刷电机的采用
定子铁心冲片取消齿槽后,扩大了绕组的布置空间,这就可以通过加粗铜线的截面以提高电机的电流等级,或者增加绕组的匝数以提高电机的电压等级,或者对上述两者兼而顾之,最终实现比有槽电机大的功率体积比而损耗却变化不大。
(3)电机高速化
高速电机[54]因为体积小、频响快和功率密度大等特点,在民用和军事两个方面均有极大的市场。近二三十年来,西方国家逐步开展了对高速电机的应用研究工作。
3.2 数字控制
现代计算机、电子技术和通信技术的发展,使数字化技术已经进入到各个领域。它可以克服模拟伺服放大电路的很多缺点。所以功率电传作动系统采用数字控技术也是不可避免的。
数字式控制技术具有以下优点:
(1)数字通信方式的实现。采用数字通信后,传统的模拟信号衰减及干扰现象将不再存在。
(2)便于快速的对软件系统升级改进。
(3)系统便于调试。
(4)较高的系统集成度。
3.3 信号传输
现代飞机大量采用复合材料,使得机身屏蔽电磁波的能力大大减弱。全电飞机采用电气控制后,其抗电磁干扰能力会进一步降低。为了避免这种缺陷,国内外开展了光传操纵系统的研究。其本质仍是功率电传,只是在信号传输介质采用光缆替代电缆。
光传操纵方式可以减小整个信号传输系统的重量、缩小体积;具有不损失传输能量、电隔离性好、传输频带宽、数据量大、速度快等优点。
4 结 语
尽管国内诸如西北工业大学等单位对功率电传作动系统用稀土永磁电机开展了大量的研究工作。但是与发达国家相比仍存在着发展相对滞后、工程化程度不高等问题。为此,需要不断地提高电机的可靠性;努力提高永磁材料的性能;采用无位置传感器等新技术并逐步实现工程应用。此外,还需要从电机-机身一体化、高功率密度重量比、新型的控制策略与方法和信号传输技术等方面继续加大发展力度。
[1] 林辉,齐蓉.飞机电气系统关键技术研究[R].西安:西北工业大学.2001.8:7-11.
[2] Steven Croke,Jack Herrenschmidt.More electric init-iative power-by-wire actuation alternatives[C] //Aero-space and E-lectronics Conference,1994.NAECON 1994.Proceedings of the IEEE 1994 National 1338-1346.
[3] 祁晓野,付永领,王占林.功率电传机载作动系统方案分析[J].北京航空航天大学学报,1999,25(4):426-430.
[4] 徐树森,从裕松.飞行控制用的三种作动系统[J].航空科学技术,1997,2:15-17.
[5] 马纪明,付永领,李军,等.一体化电动静液作动器(EHA)的设计与仿真分析[J].航空学报,2005,26(1):79-83.
[6] Marc Budinger,Jonathan Liscout,Yu Cong,et al.Simulation based design of electromechanical actuators with Modelica[C]//Proceedings of the ASME 2009 International Design Engineering Technical Conferences&Computers and Information in Engineering Conference.2009:1-10.
[7] 唐任远.稀土永磁电机发展综述[J].电气技术,2005(4):1-6.
[8] 唐任远,赵清,周挺.稀土永磁电机正进入大发展的新时期[J].沈阳工业大学学报,2011,33(1):1-8.
[9] 刘卫国.稀土永磁电机在航空航天领域的应用[C].首届中国包头·稀土产业发展论坛专家报告集,2009:130-134.
[10] 唐任远.现代永磁电机[M].北京:机械工业出版社,1997.5-35.
[11] 李钟明,刘卫国.稀土永磁电机[M].北京:国防工业出版社,1999:15-22.
[12] 冯智海.航空航天用稀土永磁电机可靠性分析[D].西安:西北工业大学,2005.
[13] 付永领,李军,罗昀,等.机载一体化电动作动器的新发展及其关键技术[C]//中国航空学会控制与应用第十届学术年会暨自控分会成立20周年大会论文集.北京:中国航空学会自动控制分会,2002:329-336.
[14] Howe D.Electromagnetic Actuation Systems De-sign and Applications[C]//IEEE Colloquium on Limited Motion Electrical Actuation Systems.London,1998,S.1/1-1/9.
[15] Sahin F.Design and Development of a High Speed Axial Flux Permanent Magnet Machine[D].Technische Universiteit Eindhoven,The Netherlands,ISBN 90-386-1380-1,2001.
[16] Libert F.Design,Optimization and Comparison of Permanent Magnet Motors for a Low-Speed Direct Driven Mixer[D].Royal Institute of Technology,TRITA-ETS-2004-12,ISSN-1650-674x,Stockholm,2004.
[17] 孙卫华,胡贵彦.新型机载作动系统研究[M].北京:中国物资出版社,2009,10-15.
[18] 郑先成,张晓斌,黄铁山.国外飞机电气技术的现状及对我国多电飞机技术发展的考虑[J].航空计算技术,2007,37(5):120-126.
[19] 胡淑华,郑宝财,唐任远.稀土电机的发展趋势—大功率化、高功能化、微型化[J].电工技术,1995,(4):25-27.
[20] 万军.永磁直流无刷电动机的研究[D].杭州:浙江大学,2003,6.
[21] 谢军.航空电机学[M].北京:国防工业出版社,2006.
[22] Gerada C,Bradley K J,Whitley C,et al.Integrated machine design for electro mechanical actua-tion[C]∥Proc IEEE International Symposium on Industrial Electronics,2007:1305-1310.
[23] 徐书凯.中大功率EMA伺服控制技术与动态性能研究[D].南京:南京航空航天大学,2010.
[24] 郝振洋,胡育文,黄文新.电力作动器中永磁容错电机及其控制系统的发展[J].航空学报,2008,29(1):149-157.
[25] 刘卫国,马瑞卿.双余度无刷直流电机控制系统[J].电气技术,2006(7):11-13.
[26] Sadeghi T,Lyons A.Fault tolerant EHA architect-ures[J].IEEE AES Systems Magazine,1992:32-41.
[27] 王自强,朱耀忠,陈杰峰.飞行控制用无刷直流电动机的结构设计[J].北京航空航天大学学报,2003,24(6):779-782.
[28] Richter E ,Radun A V E,Ferreira C.An integrated electrical starter/generator system for gas turbine application,design and test results[C] ∥Proc ICEM conf.,Paris France,1994:713-719.
[29] Richter E.Switched reluctance machines for high performance operations in a harsh environment-a review paper[C]∥Proc ICEM Conf.Boston,MA,USA,1990:667-681.
[30] Richter E.High temperature,lightweight,switched reluctance motors and generators for future aircraft engine applications[C]∥Proc.Am Control Conf.Green Valley,Az,USA.American Automatic Control Council,1988:1846-1851.
[31] Stephens C M.Fault detection and management system for fault tolerant switched reluctance motor drives[J].IEEE Trans.Ind Appli.1991,11(27):1098-1102.
[32] Ferreira A A,Jones S R,Drager B T.Design and implementation of a five-hp,switched reluctance,fuel-lube,pump motor drive for a gas turbine engine[J].IEEE Trans.Power Electron,1995,1(10):55-61.
[33] Zhu Z Q,Howe D,Mitchell J K.Magnetic field analysis and inductances of brushless dc machines with surface-mounted magnets and non-overlapping stator windings[J].IEEE Trans.on Magnetics,1995,18(3):115-121.
[34] Ede J D,Atallah K,Wang Jiabin,et al.Effect of optimal torque control on rotor loss of fault-tolerant permanent magnet brushless machines[J].IEEE Transaction on Magnetic,2002,38(5):312-320.
[35] Wang Jiabin,Atallah K,Howe D.Optimal torque control of fault-tolerant permanent magnet brushless machines[J].IEEE Transaction on Magnetic,2003,39(5):2962-2964.
[36] Atallah K,Wang Jiabin,Howe D.Torque ripple minimization in modular permanent brushless machines[C]∥Proceedings of IEEE International Electric Machines and Drives Conference.IEEE,2003:370-375.
[37] 齐蓉,陈明.多电飞机容错作动系统拓扑结构分析[J].航空计算技术,2005,35(1):82-85.
[38] 王海南,赵争鸣,刘云峰.新型高容错电机集成系统的设计[J].电工电能新技术,2001(3):29-32.
[39] 张兰红,胡育文,黄文新.容错型四开关三相变换器异步发电系统的直接转矩控制研究[J].中国电机工程学报,2005,25(18):140-145.
[40] 张兰红,胡育文,黄文新.采用瞬时转矩控制策略的异步发电系统的容错研究[J].航空学报,2005,26(5):567-573.
[41] 张兰红,胡育文,黄文新.基于直接转矩控制技术的异步电机驱动系统两种容错方案研究[J].南京航空航天大学学报,2005,37(1):36-41.
[42] 戴卫力,王慧贞,严仰光,等.航空起动/发电系统的发展趋势与研究现状[J].航空科学技术,2010(5):28-32.
[43] 梅彦平.航空高压直流稀土永磁无刷电机控制技术研究[D].西安:西北工业大学,2005,1-3.
[44] 曹涛,刘景林,李虑怀,等.270V高压稀土永磁直流电动机电磁场分析[J].微电机,2008,41(9):72-73.
[45] 薛龙献,黄佑,胡林,等.飞行器作动系统驱动能源对比分析[J].机床与液压,2008,36(10):176-178.
[46] Lyshevski S E.Electromechanical flight actuators for advanced flight vehicles[J].IEEE Trans.Aerospace and Electronic Systems,1999,35:511-518.
[47] Gerada C,Bradley K J.Integrated PM machine design for an aircraft EMA[J].IEEE Trans.Ind.Electron,2008,55(9):3300-3306.
[48] David Blanding.Subsystem design and integration for the More E-lectric Aircraft[C]∥Proc.ICAS,2006:1-8.
猜你喜欢
装备环境工程(2022年9期)2022-10-13
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
大众科学·中旬(2020年6期)2020-06-29
山东工会论坛(2020年3期)2020-06-10
铁道通信信号(2020年11期)2020-02-07
航空兵器(2020年6期)2020-01-25
汽车与新动力(2019年5期)2019-11-07
铁道通信信号(2019年1期)2019-03-21
中国资源综合利用(2016年10期)2016-01-22