
新型SVPWM算法在工业缝纫机中的应用
2012-02-15 03:29何明华王英俊
电子设计工程 2012年10期
彭 惠,何明华,王英俊,林 东
(1.福州大学 电气工程与自动化学院,福建 福州 350108;2.福州大学 物理与信息工程学院,福建 福州 350108)
我国是世界公认的缝纫机生产大国,工业缝纫机产量占世界总产量的50%以上。近年来,为提高服装质量和生产效率,生产厂家不仅在缝纫机的结构上做了很大改进,还逐渐采用性能更好的PMSM(永磁同步电机)调速系统替代传统电机调速系统。
针对工业缝纫机的驱动控制系统,文中采用了一种新型SVPWM算法进行控制。该算法相对于传统的SVPWM算法,具有的优点是无需进行与扇区相关的判断与计算,从而缩短了数字信号处理器的编程时间和程序运行时间,可提高处理器工作效率。通过对永磁同步电机改进型矢量控制的理论分析,建立相应的仿真模型,经过仿真分析,给出了一个能实现快速起停,上下停针,自动剪线等功能的高性能设计方案。
1 新型SVPWM算法
1.1 新型SVPWM理论分析
根据定子三相电压定义的定子电压空间矢量表达式如下:

电压矢量在两相静止坐标系中的分量uα,uβ与三相电压分量 ua,ub,uc的关系如式(2)所示:
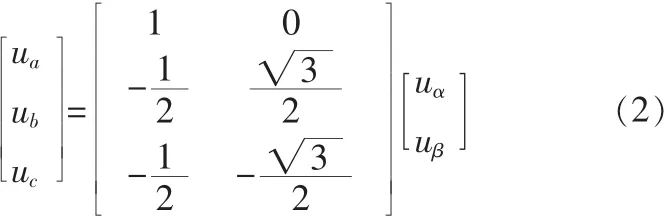
对于给定的电压分量,采用下标r表示,如Ur表示给定电压空间矢量,ura,urb,urc分别表示给定的三相电压分量,它们与Ur之间也满足式(1)。
新型SVPWM算法是依据三相给定电压计算逆变器各相上桥臂导通(即接通高电平)的时间 ti(i=a,b,c)。 若 uri是给定的三相电压,tr为新型SVPWM的脉宽调制周期,且ud是逆变器直流回路电压,则可按式(3)计算参考时间量tri。

由于存在 tri<0 或 tri>tr的情况,故式(3)计算的 tri不能真正用来表示每一相输出高电平的时间,需按式(4)进行一定的调整。

式(4) 将 tri加上时间偏移量 Δt以确保 0≤ti≤tr。当 Δt按式(3)得到的输出波形较好。

经式(4)修正后得到的ti即为三相电压型逆变器每相接通高电平的时间,这就是新型SVPWM的原理。最后设置DSP中定时器T1工作模式为连续增减计数模式,并根据式(6)计算得T1中各比较单元的比较值Vi。

不难看出,新型SVPWM方法并未要求三相之间有协调的开关动作,它仅要求每一相上桥臂导通时间分别为就可满足上述新型SVPWM原理,所以每一相的控制有较大的自由度。
1.2 新型SVPWM的仿真
根据前面介绍的新方法,利用Simulink仿真工具,建立新型SVPWM的仿真模型,如图1所示。从图中可以看出,仿真模型并不复杂,且进行的都是一些很简单的计算,从而大大的缩减了处理器运行时间,提高了运行效率。
2 系统实现
2.1 系统硬件结构
系统硬件设计总体结构上采用DSP+IPM的模式,包括控制电路、功率主回路、信号检测及保护电路等,如图2所示。系统围绕DSP芯片搭建外围电路后构成图中所示控制板,整流桥、滤波电容、逆变器等构成系统的功率驱动电路,控制板与强电的功率驱动电路之间进行了光电隔离。整个系统包含电流环和速度环两部份。通过检测电路的霍尔电流传感器和光电编码器得到电机的电流和速度反馈信息,由DSP实现控制算法并输出SVPWM信号驱动IPM逆变器,实现PMSM旋转,使缝纫机进行缝纫工作。同时,DSP控制板与上位机通信,实时控制与显示。
系统使用TI公司TMS320F2812作为核心处理芯片,该芯片具备32位定点处理单元。PMSM参数为:额定功率400 W,额定电压 300 V,50 Hz,额定转速 4 000 r/min,极对数为 4,额定转矩为12 N·m。光电耦合部分采用了高速光耦合器6N137。功率驱动电路主要由整流和逆变两部分组成。在整流部分,采用的是三相桥式整流模块,逆变是用三菱公司的IPM PS21563模块来实现。位置传感器采用的是增量式光电编码器。DSP控制板提供SCI串口通信接口与上位机通信,由SCIRXD引脚得到上位机传来的数据,SCITXD引脚发送数据给上位机。
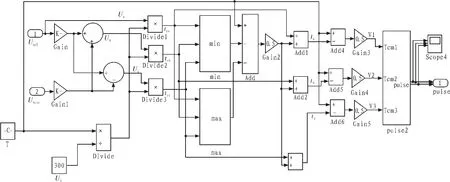
图1 新型SVPWM的仿真模型Fig.1 Simulation model of new SVPWM
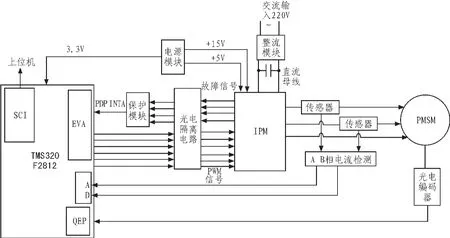
图2 系统硬件图Fig.2 Chart of hardware system
2.2 控制器软件结构
系统软件编程是在TMS320F2812系列DSP上实现,采用C语言和汇编语言混合编写。TMS320F2812主要负责对控制电路各环节的工作进行协调、保护和监督,需要参与大量的处理及计算工作,其实现的主程序流程图如图3(a)所示。
系统初始化主要包括DSP系统初始化、电机和控制器参数设置、变量初始化、PWM初始化、事件管理器初始化和定时器初始化等部分。控制模块由中断处理模块和各程序模块组成,各程序模块又由多个子程序模块组成,包括电流采样、转子位置和转速的求取、速度和电流的PI调节器、坐标变换、新型SVPWM模型等。系统的采样频率为10 kHz,当系统采集到电机三相定子电流中的两相电流值后,首先经过Clark变换得两相静止坐标系下的电流值,然后把电流值进行Park变换,得到当前一拍在两相转子旋转坐标系(即d-q轴)下的电流值。与此同时光电编码器测量得到电机转子位置和速度信息。将测量得到的转速与给定转速进行比较,经过比例积分(PI)调节,得到q轴参考电流。然后将q轴的实际电流与参考电流进行比较,同时采取d轴电流参考值固定为0的控制方式,通过PI调节器运算得到电机两相转子同步旋转坐标系下的电压量。根据转子位置信息进行Park逆变换,得到电机两相静止坐标系下的电压量,再通过新型SVPWM算法计算出三相桥臂的导通时间。最后经过三相逆变器驱动单元的驱动,电机就按给定的转速进行运转。
图3(b)是新型SVPWM算法实现流程图。由流程图可以看出,相对于传统SVPWM算法,新型SVPWM算法无需进行给定电压矢量所在扇区N计算,且在计算过程中无需按照N进行表格查询,计算量减小,耗时少。
3 仿真及结果分析
文中使用MATLAB/Simulink工具箱对工业缝纫机控制系统进行仿真。实验模型中用的 PMSM参数具体为Rs=0.958 5 Ω,Ld=0.005 25 H,Lq=0.005 25 H,ψf=0.182 7 Wb,J=0.000 632 9 kg·m2,pn=4。实验模拟实际运行过程中遇到突发事件,负载转矩增加时的工况,仿真时间为0.25 s。系统给定转速为700 r/min,仿真结果如图4、图5所示。
0 s时电机处于静止状态,给电机一个初始负载转矩1 N·m,在0.1 s时负载转矩突加到3 N·m。由图4可知,负载突变时,电磁转矩响应迅速,能准确稳定在给定值。因为算法递推在估算转速时需要一定时间,由图5可知,电机起动时转速虽有一定误差,但经过约0.03 s就稳定在给定转速,响应速度较快。在0.1 s突加负载时,实际转速有波动,随后快速达到稳定,动态性能较好,满足系统要求。
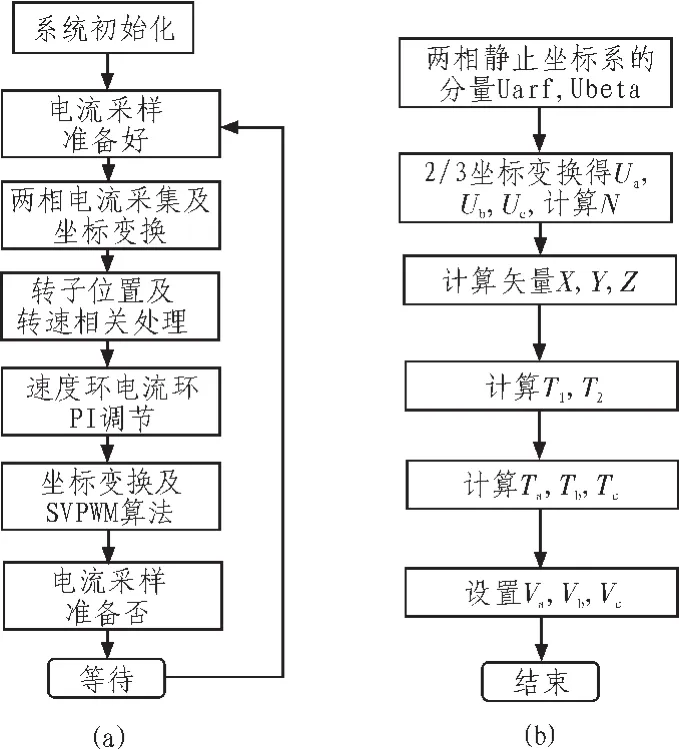
图3 程序流程图Fig.3 Chart of program flow
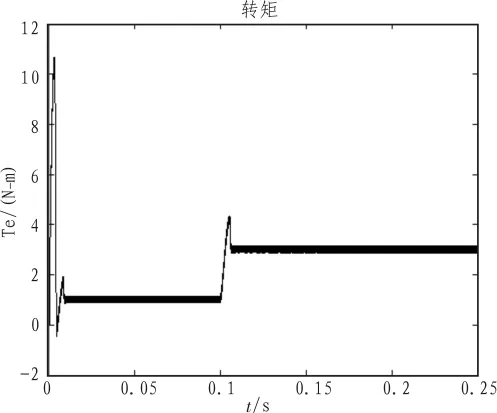
图4 电机转矩曲线Fig.4 Electrical machine torque curve
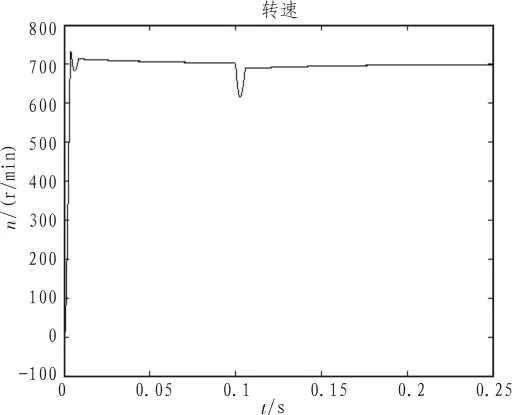
图5 电机转速曲线Fig.5 Electrical machine speed curve
4 结束语
文中详细介绍了新型SVPWM算法和MATLAB/Simulink中的新型SVPWM模型,建立了基于矢量控制的仿真模型。仿真结果表明:电机电磁转矩的响应时间很快,动态性能较好,转速也能在很短时间内达到稳定,满足系统性能的要求。同时通过介绍系统软硬件的设计方案,实现了基于永磁同步电机改进型矢量控制的工业缝纫机驱动系统的设计。
[1]陈伯时.电力拖动自动控制系统—运动控制系[M].3版.北京:机械工业出版社,2003.
[2]姜淑忠,祁贲.工业缝纫机永磁同步伺服电动机系统[J].微电机,2004,37(4):50-51.JIANG Shu-zhong,QI Ben.PM synchronous servo motor systemof industrial sewing[J].Machines Micromotors,2004,37(4):50-51.
[3]袁登科,徐国卿,张舟云,等.一种新型空间电压矢量脉宽调制方法[J].同济大学学报,2008,36(12):1702-1706.YUAN Deng-ke,XU Guo-qing,ZHANG Zhou-yun, et al.Research on a novel space vector width modulation method for voltage-source inverter[J].Journal of Tongji University,2008.36(12):1702-1706.
[4]陈荣.永磁同步电机控制系统[M].1版.北京:中国水利水电出版社,2009.
[5]郎宝华,刘卫国,周熙炜,等.空间矢量脉宽调制的仿真研究及应用[J].电机与控制应用,2007,34(8):6-9 LANG Bao-hua,LIU Wei-guo,ZHOU Xi-wei, et al.Research of simulation and application on space vector pulse width modulation[J].Electric Machines&Control Application,2007,34(8):6-9.
[6]魏克新,王云亮.MATLAB语言与自动控制系统设计[M].北京:机械工业出版社,2001.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨铁道科技(2020年4期)2020-07-22
趣味(语文)(2018年8期)2018-11-15
红岩春秋(2017年9期)2017-10-11
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
