智能家居中老人跌倒远程监护系统的设计
2012-01-31 05:22肖丽,付蔚,王平
电视技术 2012年13期
肖 丽,付 蔚,王 平
(重庆邮电大学 网络化控制技术与智能仪器仪表教育部重点实验室,重庆400065)
据资料调查显示,跌倒是造成中国65岁以上老年人伤害死亡的首位原因[1]。针对老年人易跌倒的情况,除了事前的防范之外,更重要的是在老年人跌倒后,第一时间通知家人和医院,及时进行救护,将伤害降到最低。因此,建立一套完善的远程跌倒检测报警监测与通信系统是非常必要的[2]。
1 系统总体方案设计
这里设计的跌倒检测报警远程监护系统主要由三大部分组成:远端跌倒监护报警设备,监护端,两者间的通信网络。
远程跌倒检测报警仪主要负责对人体姿态的监测。当检测到佩戴者发生跌倒后,进行本地声光报警,发送远程报警信息。同时跌倒检测报警仪还具有危急情况主动报警功能和远程报警号码修改和掉电保存功能。
监护端由手机和远程监控主机组成。手机用于及时接收短信或者电话报警信息;远程监控主机用于接收来自智能家居服务器转发的跌倒报警信息,并实时地在监控主页上进行报警提示和报警信息的存储,以便在老人跌倒后进行及时救助。
通信网络由GPRS和IEEE 802.15.4e网络组成。GPRS网络主要负责将报警信息以短信或电话的方式通知家人和医院;IEEE 802.15.4e网络负责将跌倒报警信息转发至智能家居远程监控网页上。
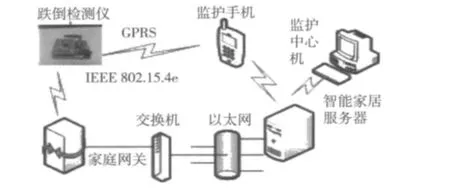
图1 系统总拓扑图
系统总拓扑图如图1所示。LM3S1138处理器、蜂鸣器、输入按键、GPRS通信模块、IEEE 802.15.4e通信模块以及电源等部分组成。系统硬件结构图如图2所示。
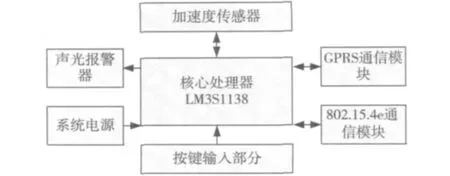
图2 硬件结构图
2 系统硬件设计
跌倒检测报警仪的硬件结构主要由加速度传感器、处理器采用的是TI公司的Cortex-M3内核的LM3S1138处理器。该处理器是一款32位的ARM Cortex-M3内核(ARM v7M架构)的、兼容Thumb-2指令集的、能提高代码密度25%以上的、以50 MHz的运行频率能加快代码运行速度35%以上的高性能低价格的处理器[3]。
加速度传感器采用的是美国ADI公司的ADXL345。ADXL345是一款小而薄的超低功耗三轴加速度传感器,采用3 mm×5 mm×1 mm,14引脚小型超薄塑料封装,分辨力高,测量范围达±16g,可以在倾斜检测应用中测量静态重力加速度,还可以测量运动或冲击导致的动态加速度[4],是一款非常适合做跌倒检测用的加速度传感器。
GPRS模块采用的是华为公司的GSM模块,使用50-PIN B2B连接器接口方式,为外围设备提供UART接口、SIM卡接口等[5]。这里GPRS模块通过串口与核心处理器相连接,核心处理器通过AT指令配置,能与其进行有效的通信。
CC2430无线模块采用的是本实验室基于即将发布的国际IEEE 802.15.4e标准、自主研发的协议栈软件。该协议栈支持自组织和终端设备自适应入网、支持信标帧调度和三次握手进行DSME分配的机制,网络容量扩充性好,资源分配效率高,有效地解决了无线网络中存在的隐蔽问题,网络具有良好的自组织性和高可靠性。
3 系统软件设计
3.1 加速度传感器的基本工作原理
加速度传感器工作的基本原理是牛顿第二定律,F=ma,其中F为物体所受作用力,m为物体的质量,a为作用力F产生的加速度。
加速度传感器就是将加速度这一物理信号转变成便于测量的电信号的仪器。在加速度传感器中是通过测量作用力F来测量加速度的,在传感器内部利用电磁力平衡作用力F,就能得到作用力F与电压(电流)的对应关系。其本质是通过作用力造成传感器内部敏感器件变形,测得器件的变形量,并通过相应的电路处理转化成电压或电流输出,从而得到相应的加速度信号或信息。
3.2 算法的研究与实现
在使用加速度传感器时要得到准确的加速度值,首先应该对其进行人工矫正[6]。因此将加速度传感器静止放在桌面上,X轴在左右方向上,Z轴在前后方向上,Y轴在重力加速度方向上,则此时Y轴应该输出大小为1g的加速度,X轴、Z轴应输出0g。若有偏差则应校准,校准后Y轴输出为-1g,X轴、Z轴则输出0g。
为了对跌倒时加速度变化情况进行详细的研究与分析,主要采用实验模拟测试的方式。以下对老人日常行走,坐下、起身,以及向前、向后、向左、向右的跌倒进行了模拟测试,并对其加速度变化进行观察分析。
测试时2位同学将三轴加速度传感器通过松紧带佩戴在腰前位置。三轴加速度的方向为X轴在左右方向上、Y轴在上下方向上,其中Y轴的正方向与重力方向一致,Z轴在前后方向上。其中当轴的方向与重力加速度方向相反时加速度为正。因而初始静止时X轴、Z轴的输出值应为0g,Y轴的输出值为-1g。因跌倒可能发生在任何方向上,若只对其中1个轴的加速度进行监测,会导致检测结果不准确,因而应将3个轴的加速度的矢量和作为特征量进行分析、监测。
图3为正常行走时的3个轴上的加速度与加速度矢量和的变化情况。图4为正常坐下时的加速度的变化情况。
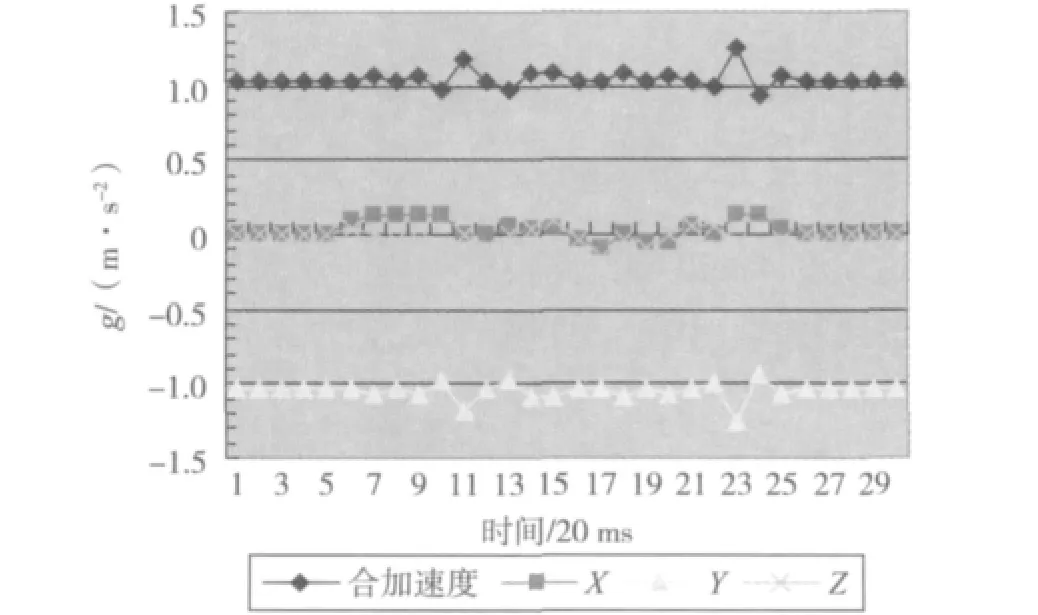
图3 正常行走时的加速度与加速度矢量和的变化情况
图5 为正常起身时加速度变化的情况。图6为向后跌倒时的加速度变化情况。
通过对以上的测试实验观察分析发现:1)正常行走时加速度变化范围小,且加速度矢量和大小始终保持在1g与1.5g之间;2)正常坐下时人体的加速度矢量和将先减小到1g以下,后增大到1g至1.5g之间;3)正常起身时加速度矢量和将会先增大后减小,但变化幅度较小,不超过0.5g。
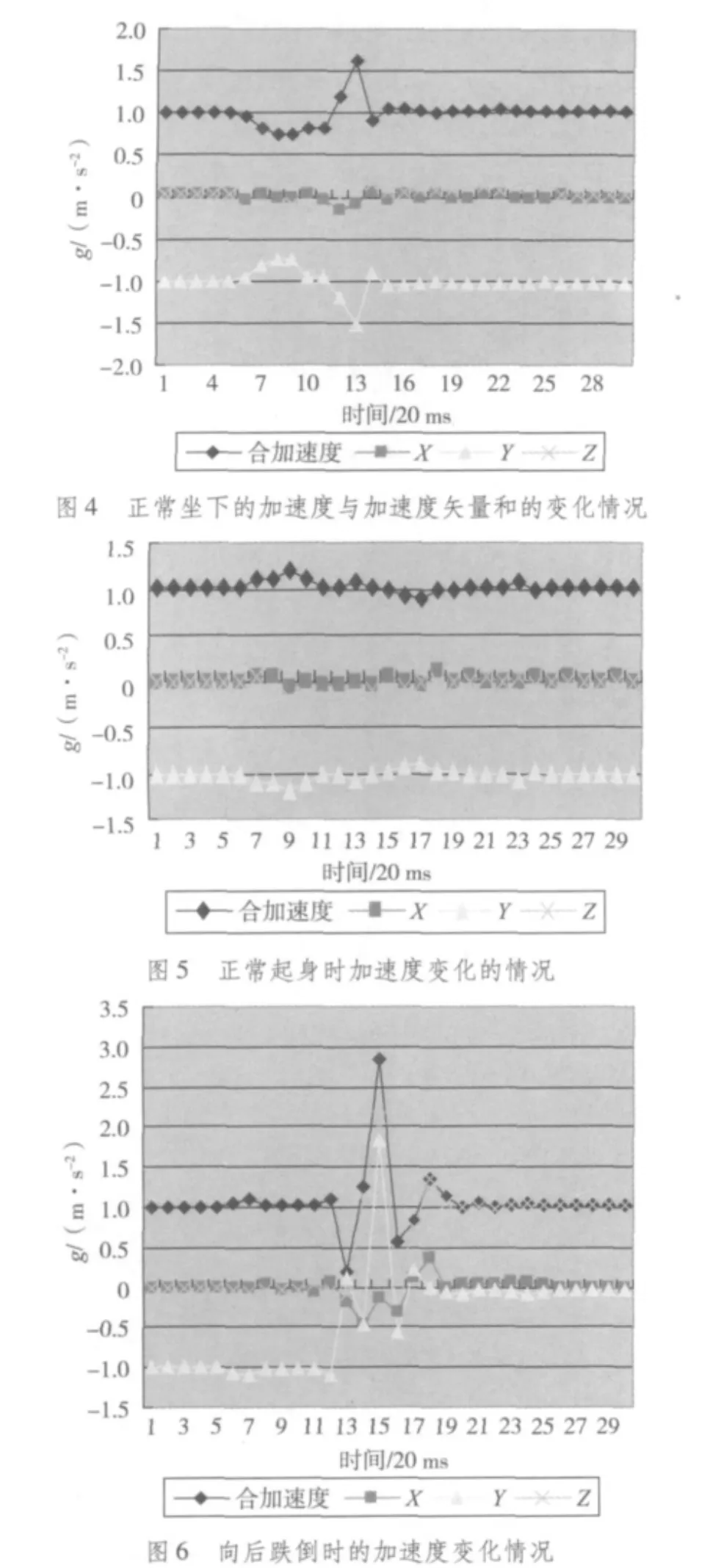
观察向前、向后、向左、向右跌倒的加速度矢量和变化曲线发现,在跌倒发生的过程中,加速度矢量和都将有一个先减小后增大的过程。加速度矢量和减小的原因是当人体发生跌倒时首先身体会失去平衡,导致所受的地面支持力减小[7],将会出现失重状态,加速度矢量和将会有一个减小的过程,在人们发生跌倒之初会出现失重状态,加速度矢量和都会先降低到0.5g以下;在跌倒发生失重之后人体着地的瞬间,人体与地面将会发生猛烈的冲击,地面对人体的支持力将会远大于人体的自身的重力,冲击将会使人体出现瞬间猛烈超重状态,从而导致加速度猛烈增大;着地后人体将会有段时间的静止,此时加速度矢量和大小接近于人体正常站立时的加速度值;但对跌倒后的静止观察发现,3个轴的加速度与初始的状态发生了明显的变化。
通过以上的分析发现,无论人们从哪个方向发生了跌倒,人的身体状态都会经历失重、超重、静止、加速度方向明显改变等几个过程。因此,可将这几个条件作为检测人体是否发生跌倒的判断条件。
人体发生跌落时必将经历以上几个状态,因此可以将以上几个状态进行合理的组合作为检测跌倒的依据。
系统初始化完,进入算法检测状态,如果在一定时间内检测到以上所有状态同时加速度变化超过一定范围则认为人体发生跌倒,发出声光预警,声光预警10 s,如果在声光预警的10 s内没有取消预警按键输入,则通过GPRS模块自动发送报警短信或者自动拨号到家人或者监护人员的手机上,同时通过IEEE 802.15.4e将报警信息发送至智能家居远程监控网页上进行报警提示和信息的存储;若在10 s内有取消报警按键输入,则停止声光报警和远程报警。同时跌倒报警仪还有紧急求救功能,如果老人遇到危急情况可手动按下报警按键进行远程报警。报警号码的远程修改功能,可以实时地接收手机短信,设置新的报警号码。号码掉电存储的功能可防止设备掉电后报警号码的丢失。算法流程图如图7所示。
4 测试及结果
为了验证设备的稳定性和本算法的正确性,将进行以下几项实验测试:正常行走,正常坐下、起身,向左、向右跌倒,向前、向后跌倒。因本实验具有一定的危险性,因而并未请老人参加实验测试,由5位同学佩戴检测仪在垫子和沙发上完成。验证结果见图8。
图8中左侧柱、右侧柱分别为第1组、第2组测试结果,每组的各个项目都进行200次测试,第2组测试是对第1组测试出现的问题分析后又进行的测试。
在坐下、起身项目中,如果迅速用力坐到沙发上,在200次的测试中出现了2次错误报警。所以在第2组测试时,采用正常较慢的速度坐到沙发上,就不再会出现错误报警。
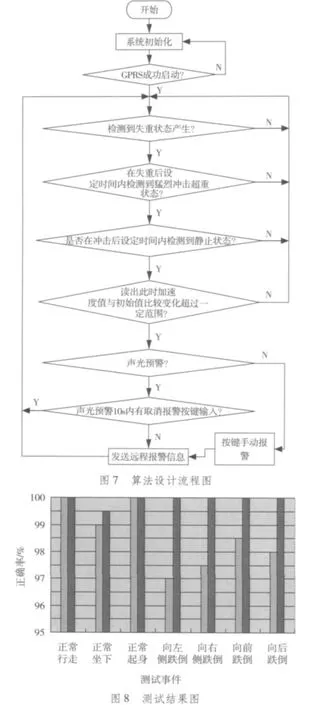
在第1组向左、向右、向前、向后跌倒测试中,分别出现了6次、5次、3次、4次的应该报警而未发生报警的现象。经过分析,如果每次测试间隔时间过短,GPRS工作进程还未结束,导致无法实现正确的检测报警。在第2组测试时,在上一次报警结束30 s以后,再进行下一次测试,就不再会出现应该报警而未发生报警的情况,达到了满意的检测效果。
5 小结
经过多次的佩戴测试与实验,证明了本文设计的基于三轴加速度传感器ADXL345,LM3S1138,GPRS和IEEE 802.15.4e的跌倒报警仪集成度高、体积小、实时性好,且能较精确地检测到各个方向上发生的跌倒情况,同时本文采取的跌倒后先采用本地声光预警,在预警过程中如果没有取消报警的举措就确认报警,这一方式进一步提高了跌倒报警的精确度,降低了误报率,具有较高的实用价值。
[1]李冬,梁山.基于加速度传感器的老年人跌倒检测装置设计[J].传感器与微系统,2008,27(9):85-88.
[2]王德富,周子萍,谷潇,等.针对老年人的关爱电视远程监护服务[J].电视技术,2011,35(21):124-127.
[3]EasyARM1138Datasheet[EB/OL].[2011-11-20].http://www.embedtools.com/pro_kaifa/ARM/EasyARM1138/easyarm1138_jianjie.pdf.
[4]ADXL345DataSheet[EB/OL].[2011-11-20].http://www.analog.com/static/imported-files/data_sheets/ADXL345.pdf.
[5]EM310DataSheet[EB/OL].[2011-11-20].http://wenku.baidu.com/view/1a2aac6aaf1ffc4ffe47ac11.html.
[6]陈卫,杨忠,夏玉亮,等.MEMS加速度传感器在微型特种机器人中的应用[J].传感器与微系统,2009,28(7):110-113.
[7]谷云高,石彦君,周晓静,等.基于MMA7455的机器人姿态控制系统的研究[J].制造业自动化,2010,32(8):15-17.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28
电子设计工程(2015年12期)2015-02-27
汽车零部件(2014年1期)2014-09-21
出版与印刷(2013年3期)2013-01-31