
用并联补偿解耦法设计MIMO控制的仿真
2012-01-26 03:45:42张秀喜郑振峰
时代农机 2012年3期
黄 威,夏 洪,张秀喜,尧 征,郑振峰
(东华理工大学 机械与电子工程学院,江西 抚州 330013)
1 引言
各个控制通道中的耦合广泛存在于多输入多输出(MIMO)的系统当中,并且时滞现象往往会影响单输入对单输出(SISO)的稳定性和控制的特性。对于实际成产过程当中,往往多个变量相互关联,一个输出受多个输入的控制,一个输入控制多个输出,并且各个控制通道存在不同程度的滞后,这样解耦补偿矩阵成为了解决滞后现象的关键。传统解决这一问题的方法主要有:前馈补偿解耦、反馈补偿解耦、对角矩阵解耦,但是对角矩阵补偿法(Diagonal Matrix Decoupling method,DMD)是广泛应用的解耦方法。但从一些资料上看来,在用这种方法计算耦合项的函数项时,都把延时项去掉,这样大大简化计算的复杂性。而在实际的工程应用过程中,如果将延时项去掉的话,控制的稳定性和系统的特性将大大缩小。
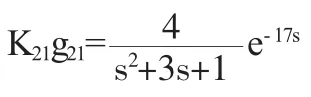
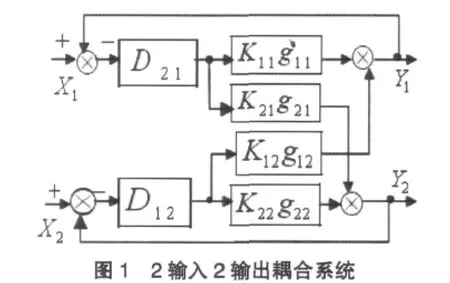
假设有图1所示的2输入2输出耦合系统,X1通K21g21过对X2管道有耦合作用,表达式为:
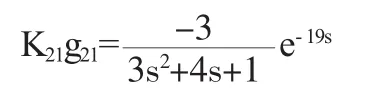
X2通过对X1产生耦合作用其表达式为:
X1通道的被控制量的表达式为:

X2通道的被控制量的表达式为:

X1,R(s),K和Y1共同构成通道,通常采用预估器和解耦器,控制器为回路的控制图,如图 2 所示,R(s),Y(s)表示系统输入,输出变量,G(s)为被控时滞对象,K(s)表示解耦器,C(s)表示控制器。H(s)不包含时滞部分。
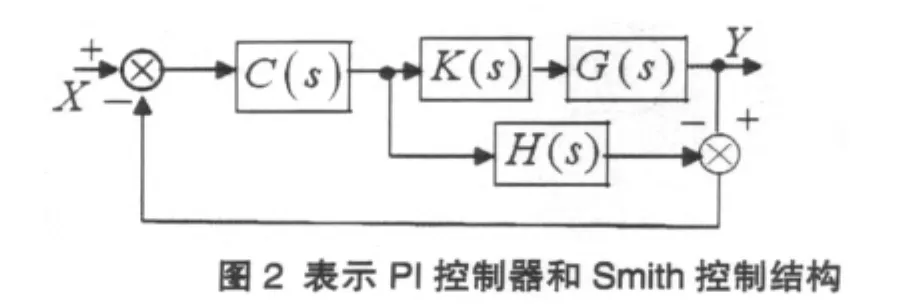
图 3 中 C(s)为 PI控制器,K(s))G(s))为被控制对象的传递函数,先假设二个通道相互独立,用Simulink软件仿真,仿真图如4所示,其中C(s)的参数,积分系数Sp1为27,比例系数Si1为0.2.第二个通道Sp2为8,Si2为0.8.Input1值为3的阶跃信号,Input2值为2的阶跃信号。

PI为控制器,其内部的 Si1,为 0.2,Sp1为 27。
最后得出的仿真结果稳定性比较好。如图5所示。

2 并联补偿法(PCD)设计
在工业自控系统中的2输入2输出系统中,由于系统多个通路之间存在着相互耦合,并且当系统的复杂性增大以后,传统的解耦方法并不能十分有效地解决这个问题,所以本文利用一种新的方法——并联补偿法,在耦合项加上一项大小相同但方向相反的耦合项,使得耦合项的作用大大减小。
该 仿 真 实 验 时 间 分 别 为 t=200,400,600,800,1000,2000,8000,10000,20000s,在仿真之后,比较并联补偿法与对角解耦法的优势。
3 结论
本文使用了一种新的解耦方法,从上面的例子可以看出,并联解耦比对角解耦的要求的条件更低,而且稳定性能更好。对角矩阵要求受控对象的矩阵必须是可逆的,但是并联解耦矩阵却没有这方面的要求。显示出了并联解耦法的优点。
[1]金以慧,方崇慧.过程控制[M].北京:清华大学出版社,1993.
[2]谢任宏.MATALAB R2008控制系统动态仿真实例[M].北京:化学工业出版社,2009.
[3]翁怡方.自动控制理论[M].北京:机械工业出版社出版,2007.
[4]刘豹.现代控制理论[M].北京:机械工业出版社,1992.
猜你喜欢
数理天地(高中版)(2024年12期)2024-06-25 15:37:29
数学物理学报(2020年5期)2020-11-26 06:06:48
数学年刊A辑(中文版)(2018年4期)2019-01-08 02:00:24
池州学院学报(2017年3期)2017-10-16 01:38:36
青春岁月(2016年8期)2016-05-14 08:25:30
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:40
应用数学与计算数学学报(2014年3期)2014-09-26 12:03:52
大学物理实验(2014年4期)2014-09-19 10:53:36
文山学院学报(2012年6期)2012-03-25 13:07:52
东北石油大学学报(2012年4期)2012-03-20 13:36:35
