丽江2.4米望远镜检偏器控制系统设计*
2012-01-25 01:26辛玉新屈中权范玉峰张瑞龙和寿圣
天文研究与技术 2012年1期
辛玉新,屈中权,范玉峰,张瑞龙,和寿圣
(1.中国科学院云南天文台,云南 昆明 650011;2.中国科学院研究生院,北京 100049;3.中国科学院天体结构与演化重点实验室,云南 昆明 650011)
早在1811年,法国科学家D E Arago首先从月光里探测到偏振光的存在[1],从而拉开了天体辐射偏振测量的序幕。1948年前后,J S Hall和W A Hiltner对恒星做的偏振测量表明:大多数远距离恒星的辐射是部分线偏振的,低银纬的恒星在垂直于银河旋臂的方向上偏振度较大[2]。虽然来自天体的偏振光被发现至今已有近200年的历史,但有关夜天文观测的天体偏振测量还相对较新,原因主要有两个:第一,偏振测量技术上的困难;第二,恒星辐射的偏振光强度没有天文学家预期的强。
偏振器是这样一种仪器,自然光通过它后能成为显著的偏振光,产生线偏振光的叫做线偏振器,如偏振片、尼科耳棱镜等;产生圆偏振光或椭圆偏振光的叫做圆偏振器或椭圆偏振器。当某偏振器件被用来产生偏振光时就称为起偏器,或简称偏振器,当它用来分析和检测偏振光是否存在、属何种类型时就称为检偏振器或偏振分析器。我国很早就在太阳观测领域使用偏振分析器[3],但到目前还没有成功进行夜天文偏振观测。
一般来说,通过线检偏器和1/4波片就能判断偏振光的类型。具体方法简要介绍如下:通过旋转线检偏器观测强度的变化,若出射强度I没有变化,则入射光可能是自然光、圆偏振光或部分圆偏振光的一种;若出射强度I有变化,且在某个角度φ达到极大值Imax,则入射光为线偏振光、部分线偏振光、椭圆偏振光、部分椭圆偏振光。要想区分自然光、圆偏振光和部分圆偏振光,或区分部分线偏振光、椭圆偏振光、部分椭圆偏振光,只需在检偏器前面加一块1/4波片即可,具体方法不再详述。
测量天体辐射的偏振状态,能为了解天体的物理状况、研究天体辐射机制和天体辐射经过的介质特性提供极有用的资料[2],例如:ESO VLT利用FORS1进行的恒星光谱偏振测量,寻找恒星磁场与恒星演化的关系,发现了线偏振与圆偏振之间的串扰[4];ESO VLT用ZIMPOL(Zurich成像偏振计)与自适应光学系统(CHEOPS)组合进行系外行星探测[5];由日冕的偏振测量可以求出日冕内电子密度和温度分布;观测塞曼效应产生的偏振用以确定天体磁场;由恒星辐射的偏振资料可以推算星际磁场等。
1 系统综述
检偏器控制系统包括控制计算机PC、控制电路箱、电源、步进电机、光电绝对式编码器、检偏器机械部分及连接电缆组成。控制计算机通过TCP/IP(RJ45接口)协议、串口(RS485)通信协议分别控制检偏器的主动部分(步进电机)和从动部分(光电绝对编码器),前者主要接收PC发过来的控制指令,执行,然后再反馈该指令回PC机,PC机可以通过验证电机回传的信息判断其是否接收并执行了正确的指令;后者可实时反馈当前电机转动位置(通过编码器读数0-1023),上位机根据反馈的信息实时调整步进电机的动作,从而实现闭环控制检偏器到达指定的角度。该检偏器安装在丽江2.4 m望远镜的卡焦上,主光路通过检偏器上的偏振片后进入云南暗弱天体光谱仪(YFOSC),从而使丽江2.4 m望远镜具备进行夜天文偏振观测的能力。世界上很多进行夜天文观测的大望远镜都已经安装或将要安装进行恒星偏振观测的设备[6]。本系统设计方案是屈中权研究员提出的,原理框图如图1。
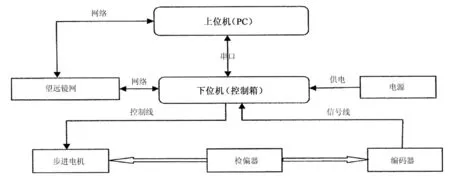
图1 检偏器系统原理框图Fig.1 Illustration of the polarization analyzer system
2 机械部分
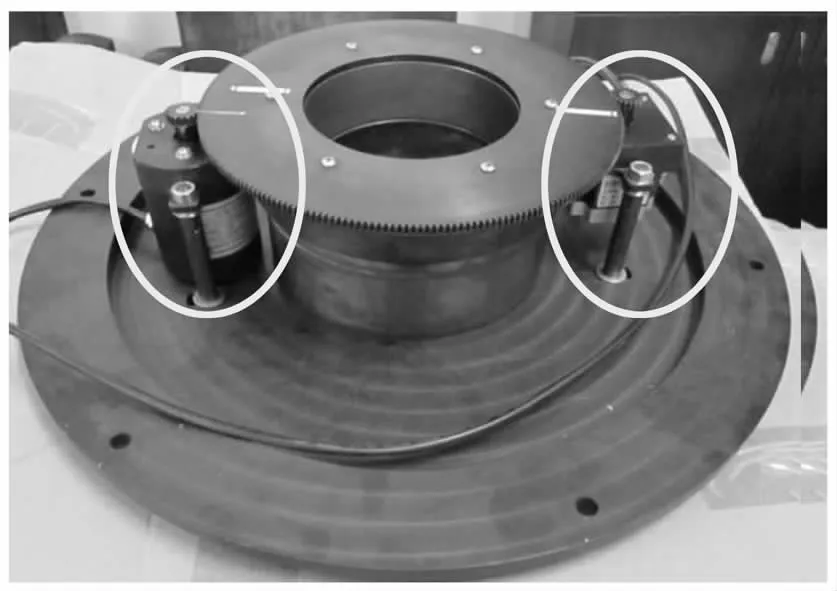
图2 机械部分(左侧:编码器,右侧:步进电机)Fig.2 The mechanical unit(Left-hand side:encoder;Right-hand side:step-motor)
机械部分(图2)是该系统的最重要的部分。首先要精确测量望远镜卡焦接口处的尺寸,要兼顾编码器、步进电机的尺寸,同时要确保机械齿轮的转动精度。尽量增大检偏器转盘直径与编码器转盘直径的比值,即增加检偏器旋转一周所对应编码器转动的圈数,最好能达到满量程32圈(编码器最大量程32圈,最大读数1024)。理想情况下的转盘分辨率为360°/1024≅0.35°,即针对1024个输出码数的编码器而言可以达到的检偏器转盘分辨率接近0.35°,当然如果选择的编码器输出码数越多其精度越高。以上只是基于理论上的讨论,由于实际机械加工的精度及难度还有成本等诸多因素考虑,最终设计的检偏器转盘直径与编码器转盘直径的比值约为13∶1,即编码器旋转13圈检偏器正好旋转一周,分辨率为360°/424=0.85°(最低要求是小于1°),刚好能满足要求。偏振片就固定在中心圆柱的中间部分,望远镜主光路通过检偏器后进入光谱仪。
3 电控部分
3.1 步进电机控制部分
电机驱动器选用的是ZD-6560-V4高性能步进驱动器,特点如下:高集成度高可靠性;接口采用超高速光耦隔离;抗高频干扰能力强;最高输入电压40 V(峰值);电源反接保护等。主要功能有:整步、二细分、八细分、十六细分可调;输出电流4档可调;过热自动保护;自动半流锁定;衰减4档可调;支持脱机、使能、锁定等功能。电机选用的是二线四相步进电机,步距角1.8°,转矩0.9 N.m,电流2 A。
电机控制程序在VC6.0环境下开发,通过使用自己编写的CWSocket类实现TCP/IP协议下的数据传输,每条完整的控制指令有12个ASCII代码数字组成,具体各位代表的意义如下:
(1)转速控制时:1-功能号;2-板号;3-方向;4-自由位;5-保留;6、7、8、9、10、11-频率值十万位至频率值个位;12-保留。
(2)步进控制时:1-功能号;2-板号;3-方向;4-自由位;5、6、7、8、9、10-步进量十万位至步进量个位;11-脉冲周期十位;12-脉冲周期个位。
功能号:“0”代表转速控制;“1”代表步进控制。
板号:代表指令发送给哪个控制板。
自由位:转速控制时“0”电机处于自由状态,“1”电机处于锁定状态。
方向:“0”顺时针旋转,“1”逆时针旋转。
脉冲周期十位、个位,步进控制时可以通过改变这两个参数来改变输出脉冲频率,从而调节步进速度,取值范围01~99,对应的输出步进脉冲频率约为30 kHz~460 Hz,电控系统原理图如图3。

图3 电机控制系统原理框图Fig.3 Block diagram of the step-motor control system
3.2 光电绝对编码器控制部分
光电绝对编码器是集光机电技术于一体的数字化传感器,体积小,驱动扭矩小,码盘间没有机械接触,转速较高,功耗低,寿命长,精确度高,无重复误差,特别适合经常运动的场合,可以高精度测量转角或直线位移。编码器旋转时有与其位置一一对应的代码,当停电或关机后,再开机重新测量时,仍可以准确地读出停电或关机位置的代码(即具有停电记忆功能),这也是选择该编码器的重要原因。
编码器主要技术指标如下:
(1)输出码数:1024码;
(2)轴每周输出/连续圈数:32码/32圈;
(3)输出信号:RS485串行通讯信号;
(4)最高机械转速:1000 rpm;
(5)工作电压/消耗电流:DC12-24 V/≤50 mA。
RS485串行通信是将编码器的并行数字信号转换成串行通讯信号输出,这种输出方式一般用于编码器输出信号的远距离传输,传输距离可达1200 m。这是选择该编码器的另一个重要原因,通过一个RS232转RS485的模块就可以对编码器进行远程读取数据。
编码器通信协议:采用MODBUS-RTU(远程终端单元)模式进行通信。
Modbus协议简介:ModBus协议定义了一个控制器能认识使用的消息结构,而不管它们是通过何种网络进行通信的,它制定了消息域的格局和内容的公共格式,描述了一个控制器请求访问其它设备的过程,回应来自其它设备的请求,以及如何侦测并记录错误信息。通过此协议,控制器相互之间、控制器经由网络和其它设备之间可以完成信息和数据的交换与传送,使各种不同的公司和厂家的可编程顺序控制器(PLC)、RTU、SCADA系统、DCS或与兼容ModBus协议的第三方设备之间可以连成工业网络,构建各种复杂的监控系统,有利于系统的维护和扩展,这个通讯协议已广泛被国内外各行业作为系统集成的一种通用工业标准协议。
该编码器实现Modbus通信协议时,均作为从机,遵循Modbus通信过程,采用MODBUS-RTU。
协议的命令子集,使用读寄存器命令(03)和预置寄存器命令(06),每个消息的开头和结尾至少有3.5字节时间的间隔。
功能码03:利用Modbus通信协议的03功能码,读取设备的数值。
信息帧格式:
(1)从机请求数据格式:从机地址、功能码、起始地址、数据个数及CRC码(见表1)。
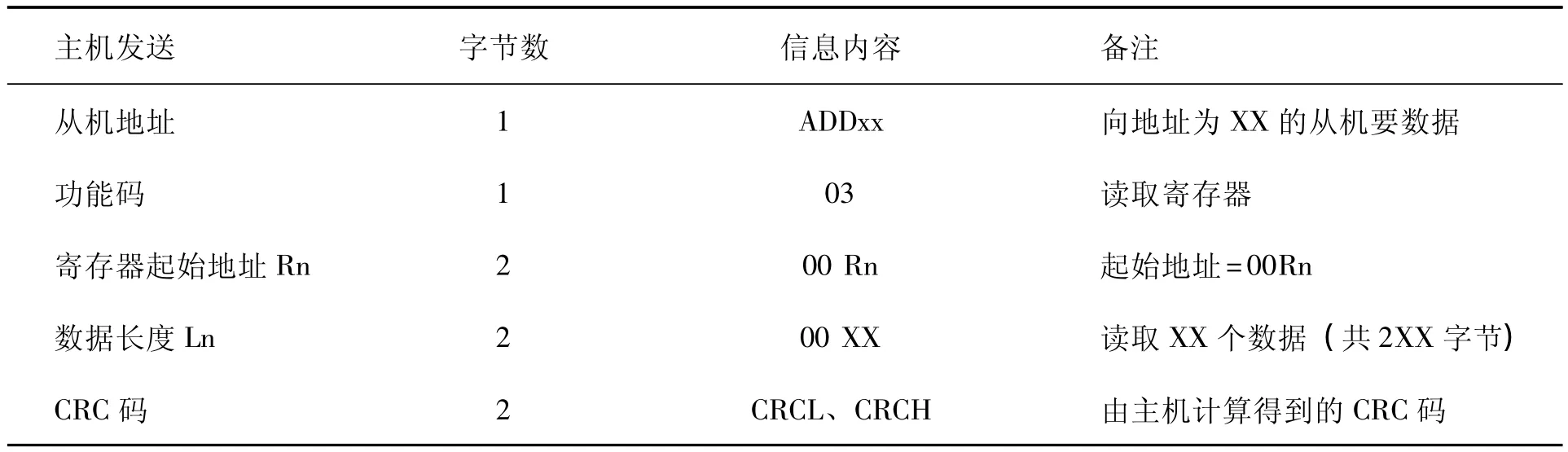
表1 从机请求数据格式Table 1 Data format of the slave request
(2)从机响应数据格式:从机地址、功能码、字节数、数据区及CRC码(见表2)。
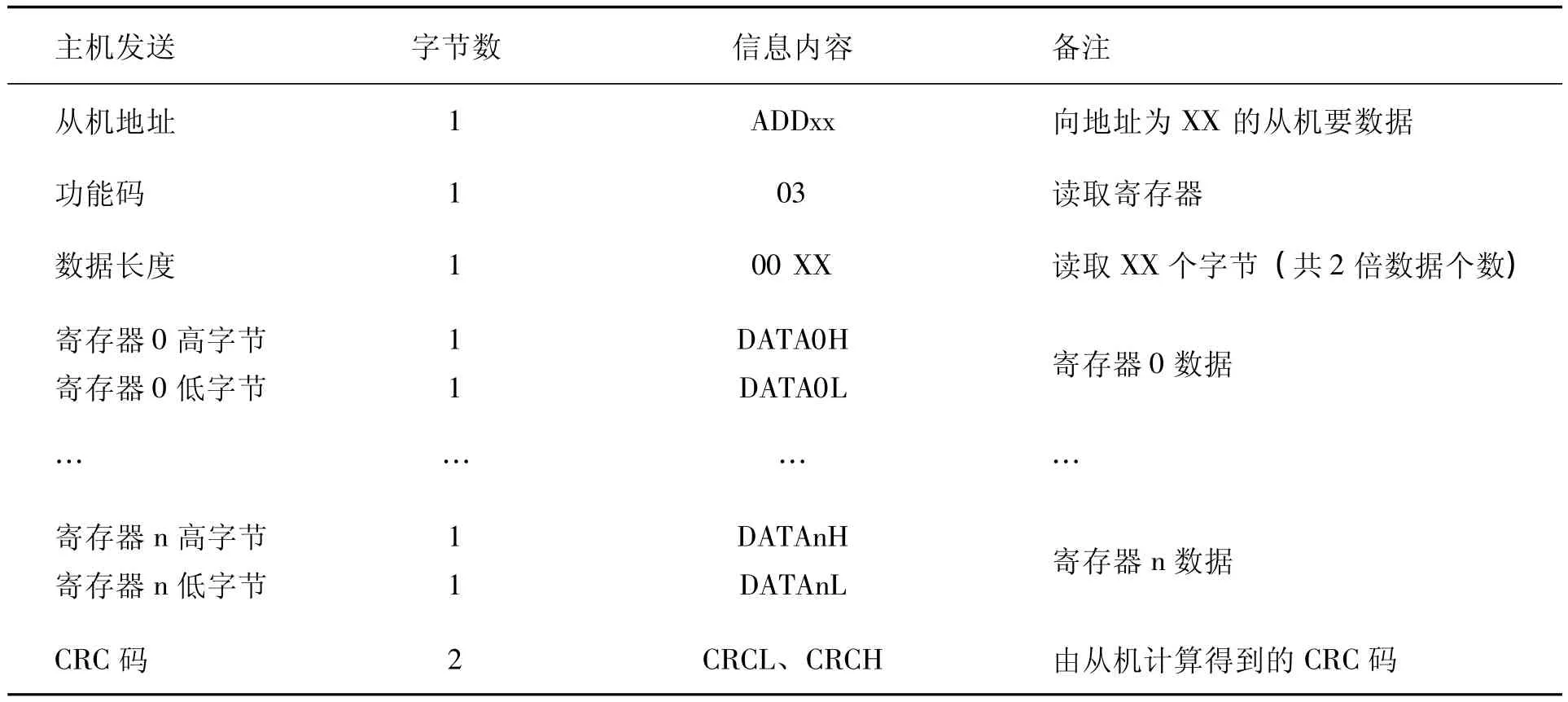
表2 从机响应数据格式Table2 Data format of the slave response
寄存器数据为2字节,高位在前。CRC码都是2字节,低位在前。
功能码06:省略(控制软件中未使用)。
主机在发送数据和接收数据时都需要对数据进行CRC校验,然后再发送出去或确认接收到了正确的数据,下面就CRC校验的含义及实现过程做简要说明。
CRC域是2字节(CRCL、CRCH),包含一个16位的二进制值。它由传输设备计算后加入消息中。接收设备重新计算收到消息的CRC,并与接收的CRC域中的值比较,如果两个值不同,则有误。具体步骤如下:
(1)预置16位寄存器为十六进制FFFF(即全为1)。称此寄存器为CRC寄存器;
(2)把第1个8位二进制数据(既通讯信息帧的第1个字节)与16位的CRC寄存器的低8位相异或,把结果放于CRC寄存器;
(3)把CRC寄存器的内容右移1位(朝低位)用0填补最高位,并检查右移后的移出位;
(4)如果移出位为0:重复第(3)步(再次右移1位);如果最低位为1:CRC寄存器与多项式A001(1010000000000001)进行异或;
(5)重复步骤(3)和(4),直到右移8次,这样整个8位数据全部进行了处理;
(6)重复步骤(2)到步骤(5),进行通讯信息帧下一个字节的处理;
(7)最后得到的CRC寄存器内容即为CRC码;
(8)将CRC结果放入信息帧时,将高低位交换,低位在前。
3.3 控制箱部分
前面板包括电源开关、指示灯。后面板包括电源接口、RJ45接口、RS232接口、电机和编码器控制线接口(航空插头)。
4 软件部分
采用C++语言作为软件设计的编程语言,使用微软的Microsoft Visual C++6.0作为开发平台[7-8]。该控制软件的操作流程如下:
(1)双击可执行文件Polarize.exe,打开图形用户界面(如图4)。
(2)点击“启动”按钮,建立TCP/IP通信,串口通信,进行一些必要的初始化。
(3)点击“初始化”按钮,将步进电机的位置进行初始化,即转到0°位置。
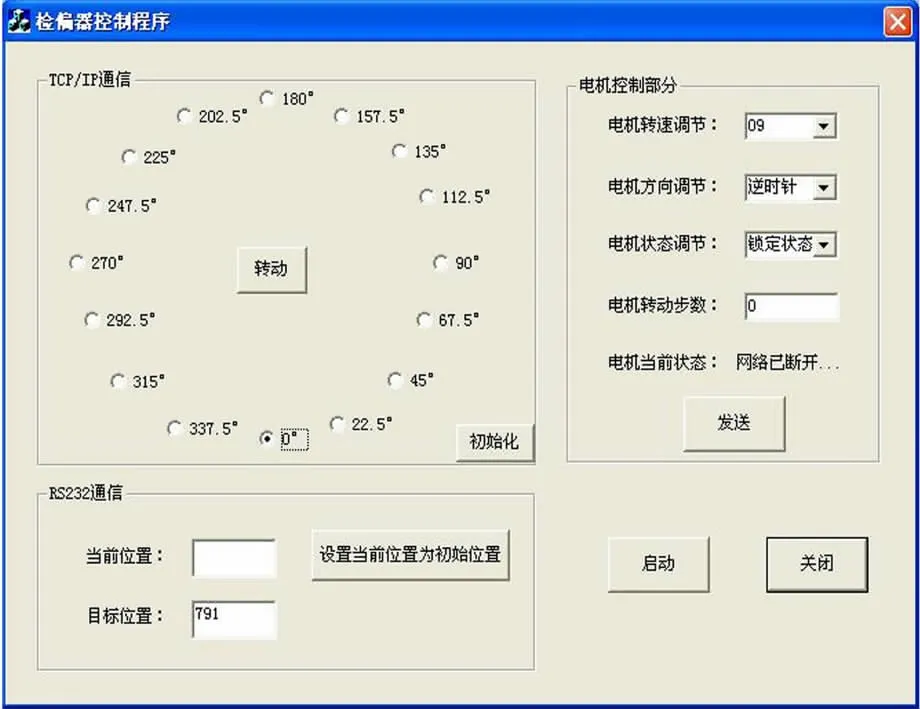
图4 检偏器控制图形用户界面Fig.4 The GUI of the polarization analyzer system
(4)选择要转动的角度,然后点击“转动”按钮即可,此时“目标位置”处的编辑框就会显示目标处编码器对应的读数,而“当前位置”处的编辑框实时显示当前编码器的读数。
(5)要想从任意一个角度回到零点位置,点击“初始化”按钮即可。
根据实际情况又添加了如下3部分:
(1)考虑到零点位置可能变动,添加了零点位置重设功能(“设置当前位置为初始值”按钮),并能将该位置信息实时保存到文本文档中,下次程序重启时会自动导入新的零点位置。
(2)另外添加了“电机控制部分”,用户可以根据实际情况控制步进电机的转动状态,转动步数,当位置未到达指定值时可以手动调节检偏器的位置。
(3)考虑到转动齿轮都有间隙,电机在转动时仅进行一个方向旋转(逆时针),当然初始化时会顺指针旋转回零点位置。初始化过程要先将电机顺时针转过0°,然后再逆时针转到0°,从而有效避免齿隙的影响。
5 系统测试
目前该系统仅在实验室内完成了软硬件调试,调试的重点放在检偏器旋转一周编码器读数的变化量上,由于机械误差,编码器、步进电机安装误差等因素,实际测得的数据与设计数值有出入。
首先需要知道电机转动多少步之后检偏器正好转动一周,试验方法如下:找一块很细且颜色鲜艳的纸条,将其切成两半分别粘贴在转动的齿轮上和电机轴外的表面上,尽量使二者在同一平面上。然后分多次,每次输入不同的步进值,控制电机旋转到二者刚好重合。经过若干次重复实验就可以找出该步进数,然后使检偏器转盘旋转两周、三周等,进一步验证和确定电机步进值与检偏器旋转角度的关系。
多次实验的结果表明当电机(8细分)步进21096步后,检偏器正好旋转一周。然后就可以确定检偏器在旋转了360°以后编码器的变化情况了,具体数据见表3。
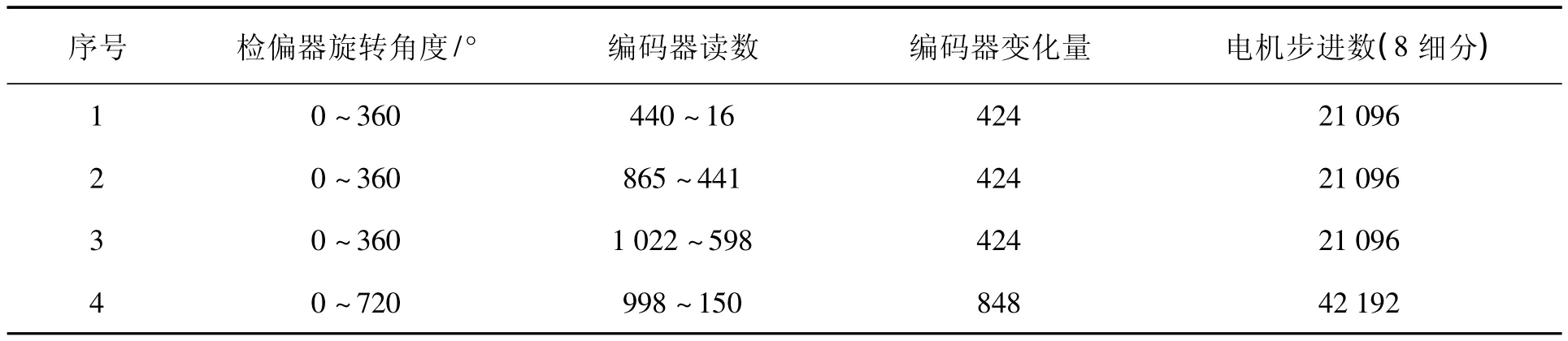
表3 检偏器旋转角与编码器读数对应关系Table 3 The designed relation between the angle of the polarizer and the output count of encoder
显而易见,检偏器旋转360°对应编码器读数变化424,由此得出编码器变化量为1时对应电机转动的角度值Δθ:
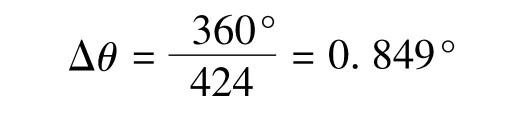
若检偏器初始位置(0°位置)对应的编码器读数为791,根据Δθ就可以确定0~360°范围内以22.5°为一个步进量的每一个角度值处误差(如表4)。

表4 检偏器旋转角与编码器读数的实测对应关系Table 4 The measured relation between the angle of the polarizer and the output count of encoder
由以上数据可知,当需要转动的角度是22.5°的偶数倍时,其理论误差为0,而需要转动的角度为22.5°的奇数倍时,其理论误差为0.42°。
6 系统有待改进和完善的地方
(1)目前望远镜控制软件是基于LINUX平台的,而本系统的控制软件是基于WINDOWS的,因此给观测者带来诸多不便,以后要实现LINUX平台下的检偏器系统控制。
(2)机械结构上可以考虑如何与望远镜的光谱仪进行无缝对接,从而使检偏器控制与光谱仪的控制统一起来。
[1]谭徽松.天体物理方法 [M].昆明:云南天文台南方基地,2008:114.
[2]程福臻.实测天体物理 [M].合肥:中国科学技术大学,2005:95-102.
[3]Z Q Qu,X Y Zh,X K Chen,et al.A Solar Stokes Spectrum Telecope [J].Solar Physics,2001,201(2):241-251.
[4]S Bagnulo,M Sterzik.Measuring Stellar Magnetic Fields with FORS1 at the ESO VLT [C]//Svetlana V Berdyugina,K N Nagendra,Renzo Ramelli.Proceedings of the Conference Held 17-21 September.San Francisco:Astronomical Society of the Pacific,2009:511.
[5]Gisler Daniel,Schmid Hans Martin,Thalmann Christian,et al.CHEOPS/ZIMPOL:a VLT Instrument Study for the Polarimetric Search of Scattered Light from Extrasolar Planets[C]//Alan F M Moorwood,Iye Masanori.Ground-based Instrumentation for Astronomy.Proceedings of the SPIE,2004,5492:463-474.
[6]C Packham,M Escuti,J Ginn,et al.Polarization Gratings:A Novel Polarimetric Component for Astronomical Instruments [J].Publications of the Astronomical Society of the Pacific,2010,122:1471-1482.
[7]Stanley B Lippamn.C++Primer[M].李师贤,译.北京:人民邮电出版社,2009.
[8]梁伟.Visual C++网络编程经典案例详解 [M].北京:清华大学出版社,2010.
猜你喜欢
世界科学技术-中医药现代化(2022年9期)2023-01-17
物理学报(2022年23期)2022-12-14
中国惯性技术学报(2020年2期)2020-07-24
空间电子技术(2020年5期)2020-03-11
电子制作(2019年12期)2019-07-16
智能物联技术(2018年3期)2019-01-10
现代职业教育·中职中专(2018年11期)2018-06-11
中国公路(2017年19期)2018-01-23
中国公路(2017年15期)2017-10-16
中国公路(2017年9期)2017-07-25