潜艇在海洋密度锋中受绕运动建模与仿真研究
2012-01-22 11:21,,
船海工程 2012年2期
, ,
(海军潜艇学院,山东 青岛 266071)
海洋锋是指在海洋中存在的特性明显不同的两种或几种水体之间的狭窄过渡带。其成因与海洋环流、海气相互作用、流的汇合与切变、海水的湍流混合、内波以及潮间作用等多种因素有关,不同振动力或锋生因素形成的锋的生命期和尺度大小也不一样。短者数小时,长者可达数月或更长,分布也从数km至数千km,深度从海面至大洋深层都可存在[1]。
海洋锋附近流场的分布,具有明显的特征,即平行于锋的流分量,在垂直于锋的方向上常有强烈的水平切变。影响这种切变的动力因素,对大尺度的锋而言,可能是处于地转平衡,在浅海小尺度锋附近的流,则所受局地加速度应力及边界摩擦力的影响,要比地转偏向力的影响更为显著[2]。
根据出现跃变的海洋环境参数的不同,海洋锋可分为盐度锋、温度锋、密度锋、水色锋以及声速锋等,而对潜艇垂直面操纵控制安全可能产生影响的主要是密度锋。当潜艇航行通过密度突变的锋面时,艇体可能出现大的倾斜和升沉,这时如果操纵措施不当,可能潜入大深度或突然冒出水面,危及潜艇安全性与隐蔽性。本文通过潜艇在密度海洋锋中的垂直面运动仿真,分析了海洋密度锋对潜艇操纵运动的影响,对潜艇遭遇海洋密度锋时的航行安全及操纵对策进行了研究。
1 海洋锋的分布情况
大洋上主要海洋锋的平均分布见图1。
海洋锋主要分布在北半球,强锋都在北半球以西边界海区。锋区长度以太平洋无风带盐度锋和南半球亚热带辐合带锋和南极锋为最。中国近海由于陆架环流变化较大,地形复杂,海洋锋的类型及变化也较复杂。其中,在渤海和黄海陆架附近存在潮生浅海陆架锋,东海和南海主要为上升流锋和强西边界流锋,沿岸流锋在各海区径流入海口附近均可出现。图2给出渤海、黄海、东海冬季主要海洋锋的分布情况[3]。
2 潜艇垂直面运动方程
本文的坐标系、名词术语和符号规则均采用国际水池会议(ITTC)推荐和造船与轮机工程学会(SNAME)术语公报的体系。
表征潜艇垂直面运动的数学模型为[4-5]
(1)
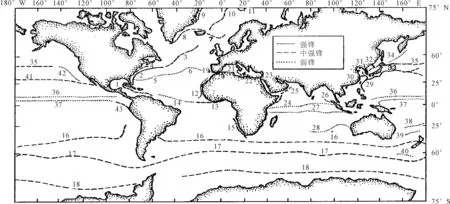
图1 世界大洋主要海洋锋锋系分布
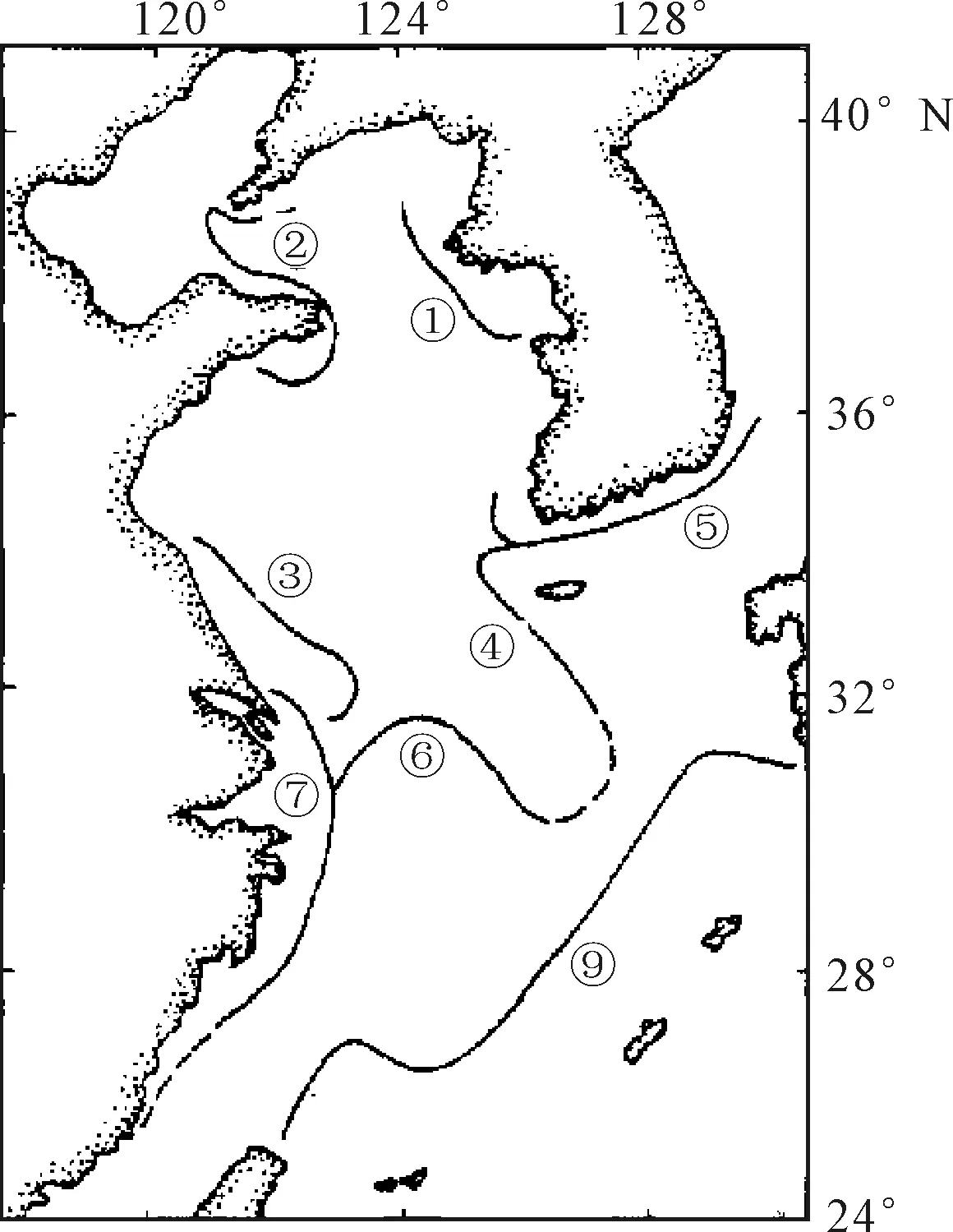
图2 渤海、黄海、东海冬季海洋锋分布情况
式中:m——潜艇质量;
P——静载荷;
u、w、q——潜艇纵向速度、垂向速度、纵倾角速度;

δb、δs——艏升降舵舵角、艉升降舵舵角;
其余带下标量为潜艇水动力系数。
3 海洋锋对潜艇航行影响仿真
3.1 密度水平梯度阶跃变化类型海洋锋模型
密度水平阶跃变化是指海水密度在水平面呈突变,海水密度水平阶跃变化可分为密度跃增和密度跃减两种情况,见图3。
取潜艇航向为海水密度水平面等值线的法线

图3 密度水平阶跃变类型海洋密度锋
方向。设密度水平阶跃变化量为K,潜艇横截面面积沿艇长分布为F(x),由于海水密度变化引起的作用在艇体的浮力增量为△B,t0为潜艇艇艏到达海水密度变化始端的时刻,t1为潜艇航行的时间。
浮力增量按下式计算。
(2)
式中:L——艇长;
V——潜艇航速;
▽——潜艇水下排水体积;
t——中间变量。
以某型潜艇为例,将其在海洋锋中的受力模型带入垂直面运动方程,运用Visual 6.0编制仿真软件,分别对潜艇在海洋锋中的自由运动、操舵控制、操舵并均衡控制等各种不同的控制状态下的垂直面运动进行仿真。
3.2 潜艇自由运动
图4为潜艇航速5 kn,海水密度水平阶跃变化量K=0.003 g/cm3时不采取任何控制情况下的潜艇自由运动仿真曲线。图中曲线分别代表姿态角(包括潜浮角、纵倾角和攻角)、深度、升沉速率、海水密度增量随时间的变化。
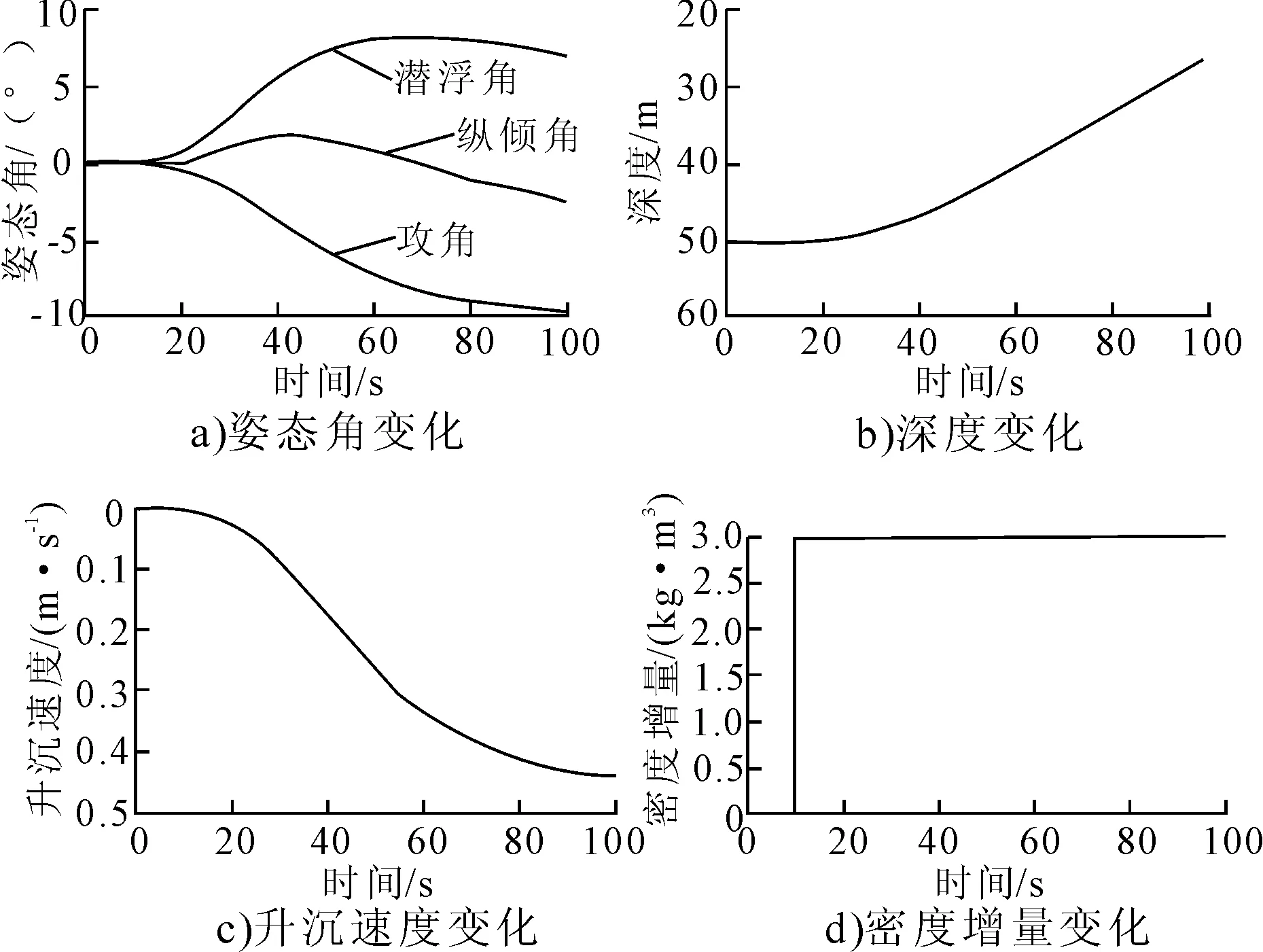
图4 海洋锋中潜艇自由运动仿真曲线
3.3 PID操舵控制
PID控制是一种 “误差反馈控制律”,它可以这么被认为:误差信号的“过去(积分)”、“现在(比例)”和“将来(微分)”的加权和。潜艇垂直面深度PID控制规律为
(3)


参数具体选择见文献[4]。
图5为潜艇航速5 kn,海水密度水平阶跃变化量K=0.003 g/cm3时,采用PID自动操舵控制情况下的潜艇运动仿真曲线。
3.4 均衡并操舵控制
图6为潜艇航速5 kn,海水密度水平阶跃变化量K=0.003 g/cm3,PID自动操舵和均衡并用,潜艇运动仿真曲线。图中曲线分别代表姿态角(包括潜浮角、纵倾角和攻角)、深度、尾升降舵舵角、围壳舵舵角、海水密度增量随时间的变化。
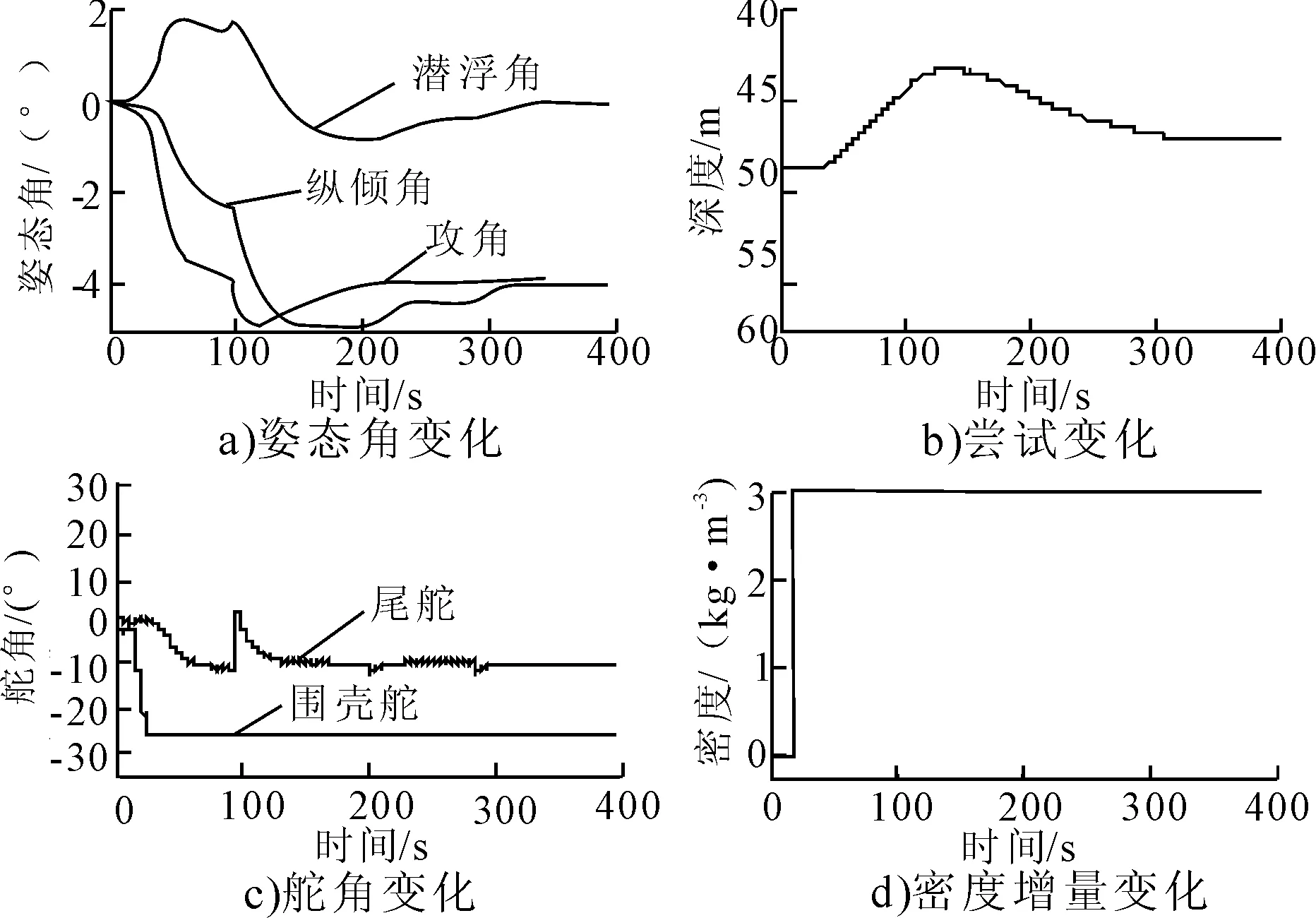
图5 海洋锋中操舵控制潜艇运动仿真曲线
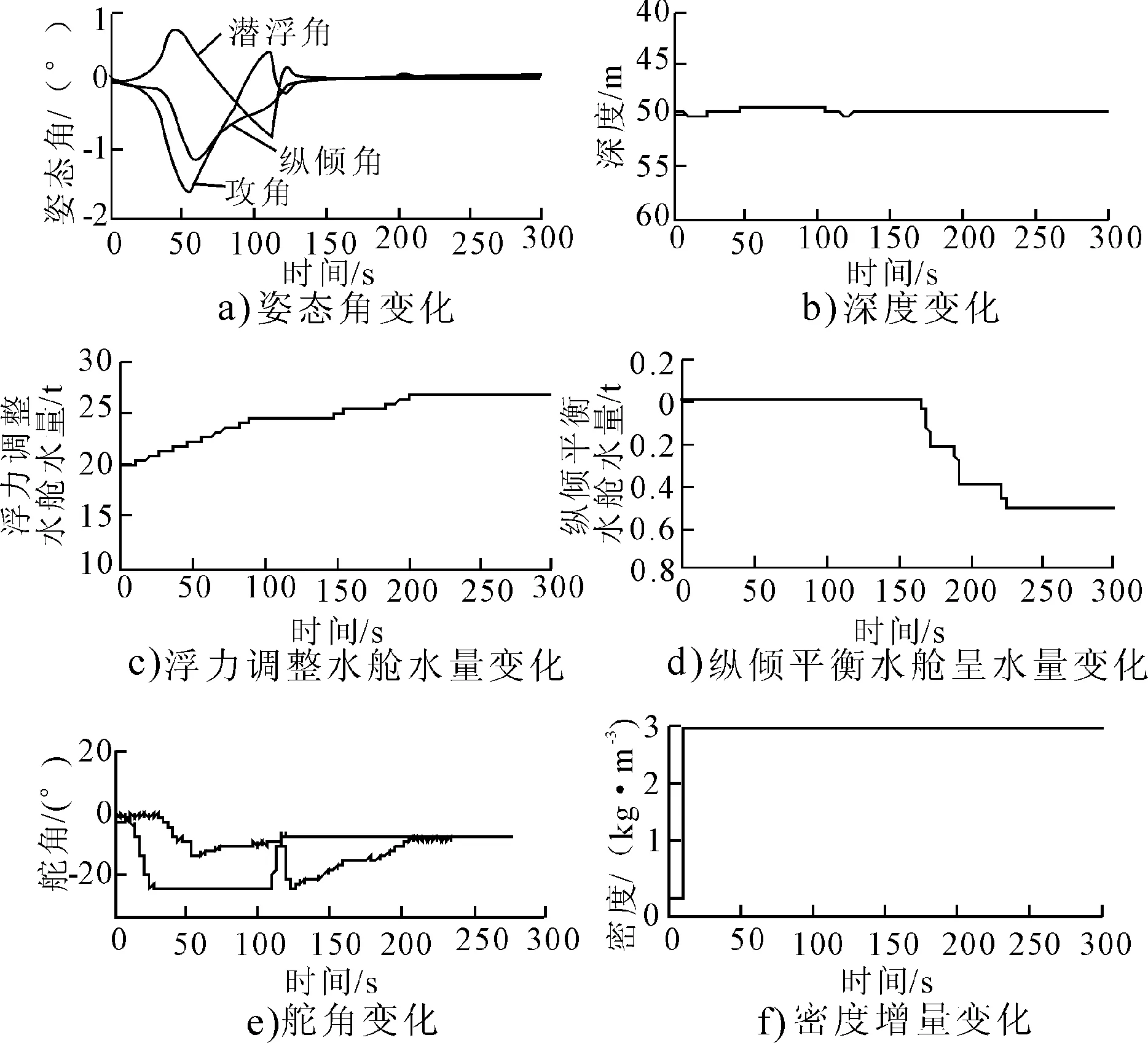
图6 海洋锋中操舵加均衡控制潜艇运动仿真曲线
4 仿真结果分析
1)海水密度水平跃变时,若不采取控制措施,潜艇无法保持航行深度和姿态,会以较大的速率作潜浮运动,而且海水密度跃变量越大,潜浮速率也越大。要保持潜艇在水下作定深运动,必须采取必要的操纵控制措施。
2)海水密度跃变量较小时仅通过采取PID自动操舵就可以将潜艇的深度和姿态很好地保持。当海水密度跃变量增大到0.003 g/cm3时,围壳舵已经操下潜满舵,潜艇深度和姿态仍控制不住,除了采取PID自动操舵措施外,必须考虑其它辅助措施。
3)当密度变化到单独操纵升降舵不能有效控制潜艇航行深度和运动姿态时,可辅以浮力调整水舱注排水和纵倾平衡水舱调水提高控制能力。
4)综合运用操舵和均衡进行控制可以更为有效地控制潜艇航行深度和运动姿态,并可降低航速增量,减少能耗。
[1] 李 磊.海洋战场环境概论[M].北京:兵器工业出版社,2002.
[2] 叶安乐,李凤岐.物理海洋学[M].青岛:青岛海洋大学出版社, 1992.
[3] 李凤岐,苏育嵩.海洋水团分析[M].青岛:青岛海洋大学出版社,2000.
[4] 施生达.潜艇操纵性[M].北京:国防工业出版社, 1995.
[5] 李光磊,周永余.一种面向控制的潜艇运动模型的简化及仿真[J].船海工程,2008,37(6):17-21.
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26
内蒙古电力技术(2022年1期)2022-03-18
化工自动化及仪表(2021年6期)2021-11-26
小哥白尼(军事科学)(2021年6期)2021-11-02
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
学生天地(2020年3期)2020-08-25
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
汽车观察(2018年9期)2018-10-23