精确线性化电动机转速控制
2012-01-18 12:03:24史晓阳刘艳萍
电子设计工程 2012年23期
史晓阳,鲁 芳,刘艳萍
(1.海军航空工程学院 山东 烟台 264001;2.海军实验基地三区 河北 秦皇岛 066000)
近年来,非线性控制理论的迅速发展使得其在系统建模和系统控制中的应用成为可能。其中,反馈线性化的方法引起了学者的广泛关注,它的核心思想是把一个非线性系统代数的转化为一个(全部或者部分)线性系统,以便可以应用线性系统的技巧[1-2]对系统进行设计。这种方法已经广泛的应用到了开关变换器控制[3],电动机控制[4-5],水利系统[6]等领域。目前,反馈线性化在控制领域的研究,大多是采用状态反馈线性化的方法以实现非线性系统的完全线性化。但是状态反馈线性化需要满足严格的能控性条件和对合条件,而且存在控制器结构复杂,不利于工程实现等缺点。从实用角度来看,实现非线性系统完全精确线性化并不比部分精确线性化更为理想[6]。
文中基于他励直流电动机非线性模型,通过选择不同的输出函数,设计了输出反馈线性化转速控制器和状态反馈线性化转速控制器。并通过数学推导和系统仿真,比较两者的控制器结构,稳定运行区域,动态性能,抗干扰能力。结果表明,输出反馈线性化控制器相比于状态反馈控制器,控制性能优良,且更具有实用价值。
1 他励直流电动机非线性模型
电动机控制的目标是控制电动机转速按照期望的指标运行。对于他励直流电动机非线性系统,选取电机转动角速度,电枢电流,励磁电流作为状态变量,即x=(ω iair)T。 选励磁电压为控制量,即u=ur,系统状态方程[7]可写为:

式中,

设电动机稳态转速时x1m=wm,解方程组

得
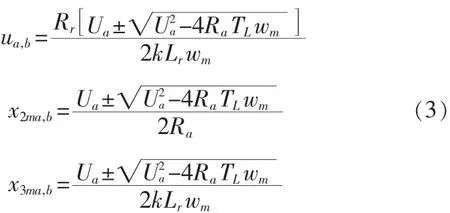
由计算结果可知,对于给定的稳态转速wm,有两组稳态励磁电压、电枢电流、励磁电流。容易看出,b组数据对应的稳态平衡点是物理上无法实现的,a组数据对应的平衡点是我们期望的电动机运行平衡点。所以当系统控制达到稳态转速wm时,期望的稳态电枢电流为x2ma,稳态励磁电流为x3ma。
2 控制器设计
2.1 状态反馈线性化控制器设计
1)状态反馈反馈线性化条件
①矩阵[g(x0),adfg(x0),…,ag(x0)]的秩为 n;
②分布 D=span[g,adfg,…,ag]在的一个邻域是对合的。
由电动机非线性模型计算得

根据定理充分必要条件②,由于[g(x),adfg(x)]=0,可得D=span{g(x),adfg(x)}在集合 U={x∈R3:x1≠0 或 x2≠0}上为 2维,非奇异,对合。
当时,det([g(x0),adfg(x0),ag(x0)])≠0 时,rank{[g(x0)adfg(x0)ag(x0)]}=3。
计算得:

电动机模型满足状态反馈反馈线性化的条件。
2)控制器设计
由于相对阶 r=3,非线性系统(1)存在输出函数 λ(x)使得系统可进行状态反馈线性化。输出函数λ(x)应满足[g(x),adfg(x)]=0,解得 λ(x)=J+La-Z3,其中 Z3=Jw+Lax为常数。则有微分同胚坐标变换z=φ(x):
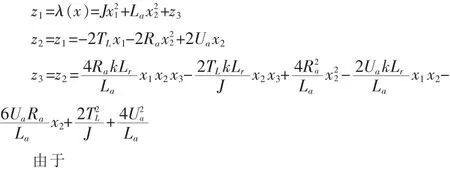

则在此坐标下得非线性状态反馈:

其中,v为线性化虚拟输入,zm为中不包含控制信号u的项。经坐标变化和状态反馈变换后,原非线性系统转化为线性化系统。

显然,线性化后的系统是能控的线性系统,应用线性系统极点配置法设计闭环,即 v=-k1z1-kz2-k2z3(其中 k1,k2,k3>0)
则加入闭环控制的控制规律为

从控制规律(6)可知,基于状态反馈线性化设计的控制律不是全局范围成立的。当}时,控制规律没有定义好,控制规律使状态运行到这些奇点时,控制器不能使系统达到平衡点。所以设计控制器时反馈系数k1,k2,k3不但要满足线性系统稳定性判据的要求,而且必须保证控制过程中的状态轨迹与没有交点,否则交点位置控制器失效。
2.2 输出反馈线性化控制器设计
选择输出函数 λ(x)=x3-Z1,显然相对阶 r=1,其中 Z1=x3m为常数。设 z1=λ(x),则=-x3+u。在此坐标下得输出反馈线性化

应用极点配置法设计非线性控制器的闭环,即v=-kz1(k>0)。
将 u=Lr(-kz1+x3)代入原系统的方程得

假设 x30=x3-Z1,有 x30=-kx30。 选择利亚普诺夫[8]函数 V(x)=+1,则 V(x)=-2k,显然对 x3∈R,V(x)正定,V(x)半负定。由李亚普诺夫稳定性理论可知,控制规律u=Lr(-kz1+x3)使得系统全局渐进稳定。
3 系统仿真实验
为了比较2种控制器的控制效果,文中是用Matlab中的Simulink对所建系统的模型进行仿真。他励直流电动机的负载额定转矩为29.2 N·m,电枢电感为0.012 H,励磁回路电阻为240Ω,励磁回路电感为0.12 H,电枢与励磁回路互感为1.8 H,转动惯量为1.0 kg/m2,电势常数取经验值k=15,电枢电压为240 V,电枢电阻为0.6Ω,额定转速为100 rad/s。
图1为在电动机额定状态下,本文设计的状态反馈控制器和输出反馈控制器启动和调速的状态响应曲线。为了考察系统的动态性能,在5秒的时调节控制规律,使电动机转速从100 rad/s稳定到127 rad/s。为了考察系统的抗干扰能力,首先控制电动机转速达到额定稳态转速100 rad/s,5 s时在电动机模型负载力矩控制端加入宽度为1 s幅值为15 N·m的干扰力矩,系统的响应曲线如图3所示。
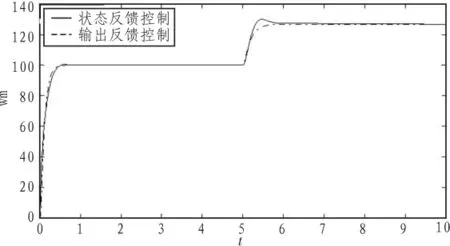
图1 转速调节状态响应曲线Fig.1 State response curve of speed regulation
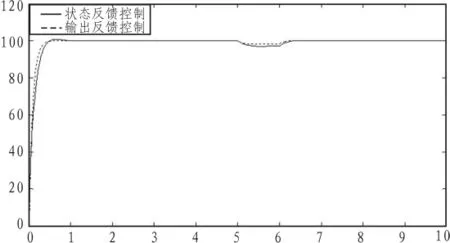
图2 加干扰力矩情况下转速响应曲线Fig.2 State response curve under disturbance torque

图3 加干扰力矩情况下转速响应曲线放大图Fig.3 State response zoom curve under disturbance torque
从图中可以看出,基于反馈线性化设计的他励直流电动机闭环转速控制器具有很好的动态性能和抗干扰能力。其中,输出反馈控制器相比于状态反馈控制器具有启动快,调速迅速,超调小,抗干扰能力强等优点。
4 结束语
文中基于他励直流电动机的数学模型,应用微分几何理论设计了输出反馈线性化和状态反馈线性化闭环转速控制器。通过数学推导表明,对于他励直流电动机非线性模型,输出反馈线性化与状态反馈线性化控制器相比,控制器结构简单,且具有更大的稳定控制区域。仿真结果表明,由于状态反馈控制器存在奇点,不是全局能控的,稳态转速的设定和极点配置参数的选择都会影响系统控制过程中的状态响应轨迹,从而可能使系统运行到奇点区域,出现控制器失效现象。在这种情况下闭环参数的设计既要保证系统具有很好的控制性能,更要保证在控制过程中系统的状态响应轨迹不经过系统奇点。这就使得控制器闭环设计变得复杂,且大多情况下无法选择最优的闭环控制参数,从而影响控制器的动态响应性能。相比而言,输出反馈线性化控制器具有动态调速性能好;抗干扰能力强;结构简单,易于工程实现;有效地避免产生奇点,控制器运行稳定,容易使系统的闭环设计达到最优配置等优点。
[1]程代展.应用非线性控制[M].北京:机械工业出版社,2006.
[2]贺昱曜,闫茂德.非线性控制理论及应用[M].西安:西安电子科技大学出版社,2007.
[3]帅定新,谢运祥,王晓刚,等.Boost变换器非线性电流控制方法[J].中国电机工程学报,2009,29(15):15-21.SHUAI Ding-xin,XIE Yun-xiang,WANG Xiao-gang,et al.Nonlinear current control method for boost converter[J].Proceedings of the CSEE,2009,29(15):15-21.
[4]孟昭军,孙昌志,安跃军,等.状态反馈精确线性化永磁同步电动机转速控制[J].中国电机工程学报,2007,11(1):21-28.MENG Zhao-jun,SUN Chang-zhi,AN Yue-jun,et al.Speed control of permanentmagnet synchronousmotor based on exact linearization via state variable feedback[J].Proceedings of the CSEE,2007,11(1):21-28.
[5]曹建荣,虞烈,谢友柏.磁悬浮电动机的状态反馈线性化控制[J].中国电动机工程学报,2011,21(9):22-26.CAO Jian-rong,YU Lie,XIE You-bai.Dynamic feedback linearization control fof induction type bearingless motor[J].Proceedings of the CSEE,2001,21(9):22-26.
[6]李啸骢,程时杰,韦化,等.输出函数在单输入单输出非线性控制系统设计中的重要作用[J].中国电动机工程学报,2004,24(10):50-55.LI Xiao-cong,CHENG Shi-jie,WEI Hua,et al.Important effection of the output function in siso nonlinear control system design[J].Proceedings of the CSEE,2004,24(10):50-55.
[7]李殿璞.非线性控制系统理论基础[M].哈尔滨:哈尔滨工业大学出版社,2006.
[8]蒋永新.动力系统的稳定性与分支理论及其应用[D].长沙:湖南师范大学,2003.
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25 03:50:10
河北电力技术(2021年2期)2021-07-29 09:16:30
中等数学(2020年2期)2020-08-24 07:58:46
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
测控技术(2018年9期)2018-11-25 07:44:24
电子制作(2018年1期)2018-04-04 01:48:34
大电机技术(2017年3期)2017-06-05 09:36:02
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32