0603贴片电阻自动分割设备的研制
2012-01-10 03:06李继生
天津科技大学学报 2012年2期
王 臻,李继生
(天津科技大学电子信息与自动化学院,天津 300222)
0603贴片电阻自动分割设备的研制
王 臻,李继生
(天津科技大学电子信息与自动化学院,天津 300222)
设计了一种用于 0603贴片电阻从板状分割成条状的自动分割设备.详细阐述该分割设备主要结构的工作原理、关键机构的设计、控制系统和气路的设计.该设备可将贴片电阻生产中的分割工序从手动操作变成半自动化操作,生产效率提高4倍.
贴片电阻;自动分割设备;气动系统
贴片电阻[1](chip-resistor)又称片式固定电阻器,是将金属粉和玻璃铀粉混合,采用丝网印刷法印在陶瓷基板上制成的电阻器.它的特点是体积小、重量轻、适应再流焊与波峰焊、电性能稳定、可靠性高、装配成本低,并可与自动装贴设备匹配(SMT/SMD设备),其常应用于自动化设备、高端计算机、通信设备及高科技多媒体电子设备上.贴片电阻按照结构可以分为:一般贴片电阻、阵列贴片电阻、网络贴片电阻等;按照尺寸可以分为:0402、0603、1005、1608、2012、3216、6432 等[2].
不同类型电阻的生产工艺[3]不同.通常,贴片电阻的第一次分割是将电阻沿冲压(或激光切割)的分割线由板状分割成条状,然后进行侧面电极的印刷(或真空喷溅)[4].第一次分割工序的成品率对整个生产工序的成品率影响很大,是贴片电阻加工制作中的一个非常关键的过程.
目前,贴片电阻的第一次分割主要采用皮带分割方式,即以偏心分割轮对基板的压力作为分割力,以皮带为介质进行分割,能够实现连续分割,效率高且稳定.但是这种分割方式只能适用于 1005以上尺寸的贴片电阻.对于 0603型电阻,因为其基板较薄(0.2,mm 左右),对压力敏感,皮带分割压力不均、厚度不均或者电阻基板分割线与分割轮中心线平行度小于 0.1,mm 时,会造成基板破碎.国内外贴片电阻生产厂家大多采用手动夹具分割的方式进行0603型贴片电阻的分割,即操作人员将单枚基板插入夹具的分割槽中,用手来控制基板插入槽中的垂直度与压力,通过绕该槽的旋转实现对基板的分割.这种方式能够较好地控制压力及分割线与分割夹具接触面的平行度.但该种方式的生产效率低下、劳动强度大,不适合工业化生产.
参考手动分割电阻基板的动作,本文设计了一种专门用于分割 0603型贴片电阻的分割设备,用旋转机构实现人工分割基板的动作,并且能够自动供给基板和收集条状电阻.
1 总体结构设计
0603型电阻的基板为冲压基板,即印刷前基板已存在分割线,印刷后厚度(0.23±0.05),mm.利用分割设备模仿人工分割贴片电阻基板的方式,能够实现电阻基板的自动供料以及分割后的自动收集,能够自动且高精度、高效率、稳定的将电阻基板分割.电阻分割设备主要包括供料、定位、分割和收集4个机构,如图 1所示.供料机构将层叠排列的经过印刷与激光调阻的基板逐一通过 z轴、x轴的传送机构,按照工序传送至分割机构的导向轨道上,并在中间位置进行基板位置的校正.定位机构将供料机构传送的基板进行位置校正,确保其以正确的姿态放入分割机构的导向轨道.分割机构将基板通过与分割线重合的旋转轴的正反向旋转,在分割轮的槽中分割为条状,并通过分割轮的定位旋转将条状电阻传送至收集机构.收集机构将条状电阻从分割轮槽中取出,依次放入指定的夹具中,并能够自动更换夹具.

图1 设备整体结构图Fig.1 Main structure drawing of the machine
2 机械结构设计
2.1 供料和定位机构
供料和定位机构如图 2所示.一个单位的基板层叠排列,手动放入供料机构中由6根圆柱导杆限位的滑块3上,用交流电机1驱动同步齿形带2的z轴运动机构,带动基板从原点向上运动,当最上层的基板到达由光纤传感器 4确定基板最上层的位置后停止;然后,由步进电机带动同步齿形带的 x轴运动机构,通过精密直线导轨滑块固定的微型吸盘机构 5,汽缸 6下压真空开启吸起最上层的基板,z轴下降并从侧面向吸起的基板吹气,保证只能吸起一张基板,x轴运动将基板传送至校正机构.
定位机构是用 3个微型导轨带动的夹紧轴承 7与 2个精密定位的轴承共同组成的平面夹紧定位机构,驱动结构采用直线薄型汽缸 8带动锥形轮,汽缸杆伸出时,锥形轮推动 3个微型导轨向外运动,留出基板放置空间.基板放入校正机构时,汽缸杆收回,3个微型导轨上的滑块依靠弹簧的弹力复位,使得3个夹紧轴承夹紧基盘,实现基板的定位.
2.2 分割机构
分割机构如图 3所示.基板推进电机 1带动同步齿形带,驱动基板夹紧机构 4夹住并带动基板,沿着基板导向轨道 5,向有 100个槽的分割轮 7运动.分割轮在原点位置时,基板可以插入分割轮的槽中,而且第一条分割线与分割轮的槽外边相切.通过传感器确认基板进入分割槽后,推进电机 1停止,基板对分割轮的槽底部的压力由调压弹簧3调节.

图2 供料和定位机构Fig.2 Feeding mechanism and location mechanism

图3 分割机构Fig.3 Breaking mechanism
基板进入分割轮的槽后,偏心轮电机带动偏心轮2旋转 360°,同时,连接在偏心轮上的连杆带动基板导向轨道5及基板夹紧机构4分别绕分割轴6正反向旋转,实现对基板沿第一条分割线的折断.连杆的两侧分别为左右螺旋的外螺纹,通过连杆的旋转,可以调节分割的角度.基板折断后,夹紧机构后退,分割轮逆时针旋转3.6°,分割轮的下一个槽旋转至分割位置,基板推进电机 1再次将基板插入分割槽中,开始第二条电阻的分割.而已经分割为条状的电阻沿分割轮的限位环旋转,逐一旋转至收集工位.如此反复运动既能实现基板的逐条分割,也实现了条状电阻向收集机构的传送.
分割机构是设备的核心机构,机构中旋转轴与当前分割槽的平行度、轨道与分割槽的平行度、基板插入分割槽的压力及基板旋转的角度,对基板的分割效果影响较大,如以上形位公差无法保证,会导致基板的破碎.在设计过程中充分考虑关键零件的公差设计和累计公差的计算与分析,调试过程中利用 DOE实验方法[3]得出最佳工作条件:旋转分割的最佳角度为 105°,分割轮旋转定位精度为±0.1°,分割轮分割槽分度累计误差为±0.1°/360°,基板对分割槽的压力为0.075,MPa,每次分割旋转时间控制在0.63,s,旋转轴与分割槽的平行度需控制在0.15,mm以内.
2.3 收集机构
收集机构如图4所示,由2个气动滑台组成x、z轴方向的机器手,将条状电阻从分割轮的槽中取出,并通过真空针管 1将其吸取、压入夹具中;夹具通过4、5两个由快速排气阀控制的汽缸张紧定位,由气动滑台 6、8的平移实现夹具的定位和自动更换.条状电阻在夹具中随支撑板7步进向下运动,步进电机带动同步齿形带实现支撑板随真空针管 1压入动作的向下缓冲和向上定位,确保条状电阻被压入及下降过程中不会受力破损.

图4 收集机构Fig.4 Accumulate mechanism
2.4 驱动机构选型
根据驱动机构的方式和要求的精度,合理地选择电机和气缸,在能够实现精度和速度要求的前提下,控制设备的开发成本.需要精密控制位置且可以停止在多个位置的驱动机构,比如分割机构的基板推动电机,选用五相步进电动机及同步带传动的驱动方式.需要快速往复运动的驱动机构,比如收集机构中x、y轴方向的机械手,选择精密气动滑台驱动方式.
3 控制系统和气路设计
本设备采用 PLC、继电器共同控制,其电气控制原理如图 5所示.根据选用的驱动电机及汽缸的特点,选用三菱的Q系列PLC控制系统及位置控制模块.在控制系统设计中充分考虑了各驱动机构的运动方式、时间及相互的运动配合,合理编制程序,并使用三菱GT11系列触摸屏作为人机交互界面.设备的参数设置,如电机的速度、定位位置等的设定均可以在触摸屏上完成.将设备的各种故障报警原因及处理方式等编制在触摸屏程序中,使得设备操作人员能够自主处理设备的报警停机.
本设备中很多机械动作均由气动系统[4]实现,如基盘的吸取、定位、夹紧,基盘定位的真空系统,条状电阻的吸取、压入动作,均由各种汽缸及真空发生器完成.在气动系统设计中,根据各机构的动作频繁程度,计算整个系统和各动作组的耗气量,合理分组,使气动系统各组动作基本均衡,减少耗气量,降低系统的容量要求.设备的主气压为 0.5,MPa,真空负压0.1,MPa.主气路原理如图6所示.
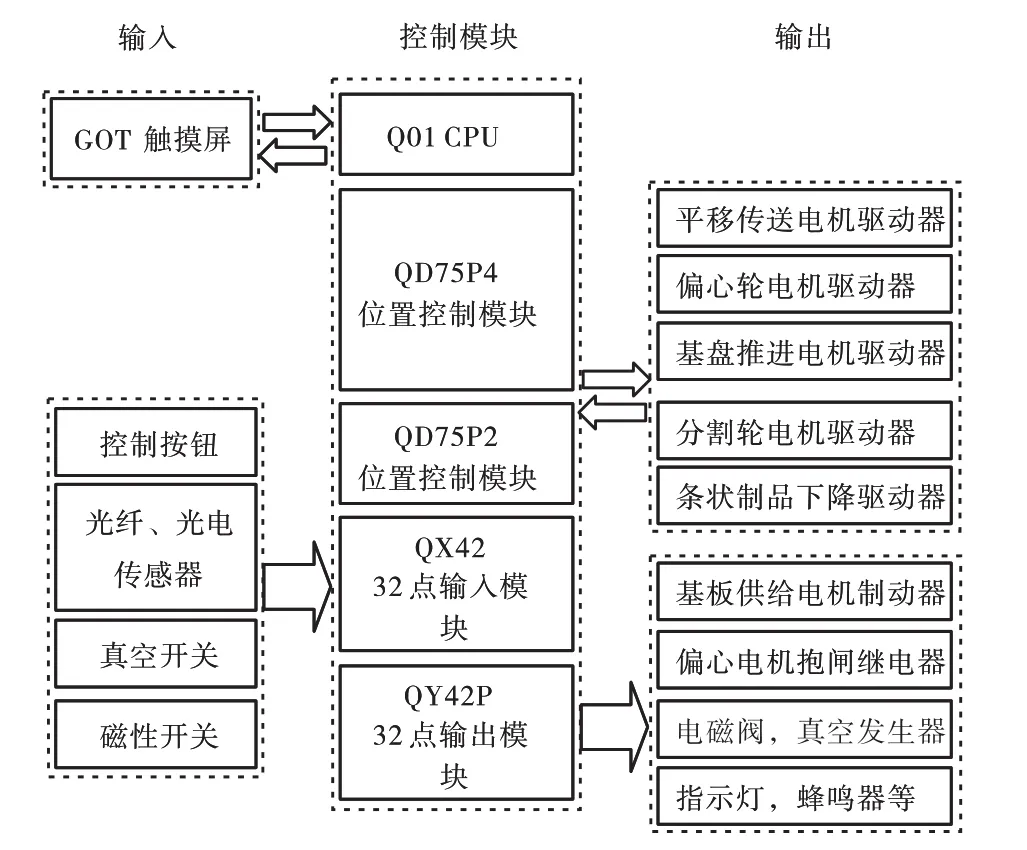
图5 电气控制原理图Fig.5 Diagram of the electrical apparatus control

图6 设备主气路图Fig.6 Diagram of the main pneumatic control
4 结 语
本文设计了一种用于 0603贴片电阻从板状分割成条状的自动分割设备,详细阐述了该设备的机械结构、电路控制系统和气路设计.该设备实现了0603型电阻基板的分割,并且能够自动供给基板和收集条状电阻.该设备已经投入实际生产,生产效率相对于人工生产方式提高4倍,成品率达到96%,以上.
[1]徐克振. 我国片式电阻器产业的发展[J]. 中国电子商情:基础电子,2005(10):36–39.
[2]鲜飞. 贴片电阻阻值大小识别[J]. 单片机制作,2008(3):29.
[3]高艳茹,孟晓玲. 片式电阻的性能及应用[J]. 印制电路信息,2004(8):66–68.
[4]张勇,李金海. 贴片电阻排条机气动系统[J]. 液压气动与密封,2006(5):57–58.
[5]任凯,王军杰,吴德宏. 基于 DOE技术的微型汽车前轮定位参数设计[J]. 中国机械工程,2010,21(3):368–372.
Development of the Automatic Termination Machine for the 0603 Chip-Resistor
WANG Zhen,LI Jisheng
(College of Electronic Information and Automation,Tianjin University of Science & Technology,Tianjin 300222,China)
An automatic machine used in the termination progress of the 0603 chip-resistor was designed. The main mechanical process,the design of the key structure of the termination machine,and the design of the electronic and pneumatic system were discussed in details . The equipment can change the manual process into a semi-automatic one,and the production efficiency can be increased 4 times.
chip-resistor;automatic termination machine;pneumatic system
TH138
A
1672-6510(2012)02-0057-04
2011–08–25;
2011–12–31
王 臻(1986—),男,新疆人,硕士研究生;通信作者:李继生,教授,lijish@tust.edu.cn.
常涛
猜你喜欢
轮胎工业(2022年10期)2022-12-30
同位素(2022年4期)2022-08-22
毛纺科技(2022年4期)2022-04-27
辽宁丝绸(2022年1期)2022-03-29
新生代(2019年11期)2019-11-13
新生代·上半月(2019年6期)2019-09-10
新教育时代·教师版(2019年3期)2019-03-11
大众文艺(2017年14期)2017-07-13
制造业自动化(2017年2期)2017-03-20
现代装饰·理论(2016年8期)2016-10-17