
引进、消化、吸收再创新的技术跨越路径模型
2012-01-07 09:14杜鹏程
统计与决策 2012年13期
肖 鹏,刘 莉,杜鹏程
(安徽大学 商学院,合肥 230039)
0 引言
随着全球经济一体化的深入,经济一体化的发展为一些国家特别是发展中国家带来了许多的发展机会,发展中国家可以利用后发优势发挥自身优势,进行技术追赶,从而逐渐缩小与发达国家的差距。然而,在面临众多机遇的同时,发展中国家也遇到了前所未有的挑战。尤其是我国,作为全球最大的发展中国家,虽然通过自身不断的努力,特别是在加入WTO以后,取得了一些突破性的进展,但是跟发达国家相比仍然存在着明显的差距。在经济全球化和信息化的今天,技术变迁和更替的速度越来越快,技术追赶的形势和任务越发紧迫,而我们在什么时候、采取何种方式和采用何种路径进行技术跨越则是我们能否顺利实施技术跨越,提高科技创新能力的关键问题。因此研究技术跨越路径就具有十分重要的意义。本文拟在分析陈德智所提出旋进路径理论的基础上,构建出引进、消化、吸收再创新的技术跨越路径模型,并以时间和旋转角速度为自变量对其进行验证。
1 研究方法
本文的研究主要采取宏观与微观相结合、静态与比较静态相结合、理论与案例相结合、模型建立与描述分析的方法。
1.1 宏观分析与微观分析相结合
技术跨越的主体可以大到一个国家,也可以小到一个企业。笔者从技术跨越的概念着手,将技术跨越的主体区分为宏观层面和微观层面。宏观层面主要是指学者们对技术跨越主体的研究是从国家的角度进行剖析的。正如我们前面所提到过的诸如Luc Soete、Hobday和徐冠华等国内外学者所研究的跨越的主体都是发展中国家。国家战略角度的技术跨越是相对于亦步亦趋或技术追随战略而言的,强调技术跨越的宏观性与整体性。中国、日本、韩国、新加坡、印度等发展中国家通过政府宏观上对技术层面的规划和谋略,进行技术引进、模仿创新等实现了技术跨越。微观层面则是相对宏观层面而言,就是具体研究一个产业或企业的技术跨越。国家层面的跨越战略的选择关系到产业层面和企业层面的跨越,产业层面和企业层面的技术跨越模式的选择要符合本国国情和国家宏观发展战略的要求;同时,产业层面和企业层面的技术跨越会促进国家层面的跨越。
1.2 静态分析与比较静态分析相结合
技术跨越是否成功实施要有一个标志,所以技术跨越主体就有一个比较对象,我们称之为被跨越对象。当跨越主体赶上甚至超过被跨越对象就是实施了技术跨越。技术跨越是一个渐进的过程,要追上甚至超过被跨越对象需要一定的技术能力和时间的积累,有时候跨越主体需要通过多次技术跨越才能追上或超过领先者。而在技术跨越的过程中,虽然对于被跨越对象来讲,并没有进行跨越,但是跨越主体的技术水平却从旧一代提升到新的一代,比如从第一代技术水平跨越到第三代技术水平。从静态分析的角度,此时技术跨越的主体也实施了技术跨越,因为与跨越主体自身的原有技术水平相比确实得到了提升。比较静态分析则是在同一时间内将技术跨越主体的技术水平与被跨越对象的技术水平进行比较。我们建立一个直角坐标系,横轴表示时间,纵轴代表技术水平,如果在同一时间内,技术跨越主体投影到纵轴的距离等于或大于被跨越对象投影的距离,那么我们就认为技术跨越主体追上或超过了领先者,从而标志着技术跨越得以顺利实施。
1.3 模型建立与描述分析相结合
笔者在利用陈德智提出旋进路径理论的基础上,运用数学知识构建了一个引进、消化、吸收再创新的技术跨越路径模型,其中,X轴表示制约技术跨越主体跨越的因素之一,Y轴则表示另外一种制约因素,Z轴则代表目标主轴。然后又构建出一个改进型的螺旋方程,并通过计算与分析,发现随着技术跨越主体对引进技术的消化、吸收,技术不断成熟,企业规模逐渐增大,而管理、生产也步入正轨,此时阻力系数较小时,可采用直进方式而非螺旋方式进行技术跨越。
2 引进、消化、吸收再创新的技术跨越路径模型
技术生命周期可分为初始引进期、成长期、成熟期和成熟后期四个阶段,技术跨越主体可以选择从不同的技术阶段进入进行技术跨越。然而不同的技术阶段对于技术跨越主体的要求不同:在技术引进初期,虽然技术跨越主体对市场、生产、管理等比较缺乏经验,但是跨越主体可选择在这一阶段进入,因为这一阶段对跨越主体所需投入的固定资本要求较低,而且技术跨越主体可以利用区域、资源、政府等优势进一步得到提升;由于技术的成长期和成熟期对新进入者所产生的技术壁垒和固定资本的较高投入,所以对技术跨越主体来讲,选择在技术的成长期和成熟期进入是不太容易形成技术跨越的;而在技术的成熟后期,由于产品和市场已经稳定,技术已经成熟,所以新进入者可以通过购买新设备和引进新技术来降低技术门槛,但是在这一阶段进入对于新进入者的固定资本要求较高,并且市场趋向于成熟与饱和,所以选择在这一阶段进入要求技术跨越主体要初具一定规模和一定的资本积累。
本文是从技术跨越过程整个系统的观点出发,研究跨越主体从技术引进初期进入,然后通过消化、吸收进行自主创新的一个过程。由于技术的引进要遵守科学的原理和市场需求的规律,我们在引进技术之初不会很快就从旧的技术水平跨越到新的更先进的技术水平,而是经过消化、吸收呈现S曲线螺旋向目标靠进。韩国通过引进先进技术并合理运用自身的优势资源,高度重视对引进技术的消化、吸收和再创新,在不断学习和实践的基础上,形成了自主创新能力,成为了学习世界先进技术和经验的基础上实现经济腾飞的典型国家。韩国成功的技术跨越的经验告诉我们如果只是技术引进、消化和吸收,不进行自主创新,则会陷入“引进—落后—再引进—再落后”的恶性循环。所以,落后者要想顺利实施技术跨越,必须坚持不断的自主创新。基于此,我们构建了引进、消化、吸收再创新的路径模型,为了更直观的描述此模型,构建了一个基于时间和旋转角速度为自变量的螺旋方程:
其中,X和Y分别表示在技术跨越系统中影响技术跨越的制约因素,而Z则表示技术跨越的目标主轴。a是旋转半径,ω为旋转角速度,t表示跨越主体围绕目标主轴做螺旋上升所需的时间,v0则代表技术跨越主体围绕目标主轴Z运动的速度。技术跨越主体在X-Y平面做圆周运动,而在目标主轴Z方向上做速度为v0的匀速上升螺旋运动,即围绕着目标主轴Z做螺旋等距运动。
我们用θ表示技术跨越主体围绕目标主轴转过的角度,则θ=ωt。当t=π/ω时,则θ=π,即技术跨越主体围绕着目标主轴转过了π角度,在坐标上表示这一点为;当时,此时θ=2π,技术跨越主体转过了2π角度,这一点的坐标可表示为,即在X-Y平面上回到原来的点,而在Z方向上上升了。而当t=2nπ/ω时(n为正整数),此时技术跨越主体转过了2nπ角度即n个圆周,到达处。
众所周知,技术跨越是一个过程,跨越主体需要不断的进行技术积累才能逐渐向目标靠近,在引进技术之初,跨越主体围绕着目标主轴呈螺旋运动,而当技术积累到一定程度,技术跨越系统具有从一种状态趋达另一种状态的能力,即技术跨越是有势系统,系统演化存在突变现象,从无序转为有序,并形成良性循环的自组织现象。此时跨越主体不再以螺旋前进,而是如图1所示以直线的方式前进。反映在图中即在某个t=2nπ/ω时,n为整数,技术跨越主体围绕目标主轴的前进方式突变为直进。在跨越主体围绕目标主轴做等距螺旋运动中,X轴方向的速度用νχ表示,则νχ=dx/dt=-aωsinωt,同理,vy=dy/dt=aωcosωt,νz=dz/dt=ν0,则,在某个t=2nπ/ω时技术跨越主体前进方式突变为直进,此时,跨越主体前进速度由变至v0,方向也由变为(0,0,1)。我们将t=2π/ω作为一个引进、消化、吸收螺旋推进周期,经过n个螺旋推进周期(n为正整数)2π/ω开始进入自主创新阶段,如此周期循环(见图1)。

图1 引进、消化、吸收再创新的路径模型
3 理论检验
如前所述,我们将技术跨越的路径定义为基于时间自变量的螺旋方程:
设定:m表示衡量技术创造的惯量,g为技术跨越主体跨越时所受到的如引进技术所需要的资金成本、技术成熟者对新进入者所形成的技术壁垒以及制约技术跨越的诸要素所形成的市场体系等外部制约因素。我们用mg表示技术跨越主体实施技术跨越时所受到的外界牵制力,f则表示技术跨越主体实施技术跨越时旋进系统对技术力产生的阻力,μ为阻力系数,角α是螺旋曲线上任一点的切向量与X-Y平面的夹角,切向量为(X′(t),Y′(t),Z′(t))=(-awsinωt,aωcosωt,v0)则。M=maw2是实行技术跨越时的市场导向力量,控制技术跨越不偏离市场需求,而M的力量是由技术创造惯量m、半径a、螺旋角速度W共同决定的。N是螺旋系统对技术力的支撑。F是组织O实施技术跨越时所需要的驱动力。为了更好地分析技术跨越系统受力情况,我们在螺旋曲线上任意选一点,分析它的受力示意图,如图2。

图2 技术跨越系统受力示意图
为了更好地理解技术跨越主体的受力情况,我们将这一点放大至一个三角直角三角形中分析它的受力情况,如图3所示,三角形的斜边等同于技术跨越主体螺旋曲线轨迹的切线方向,而直角三角形的一锐角α是螺旋曲线上任一点的切向量与X-Y平面的夹角,切向量为(X′(t),Y′(t),Z′(t))=(-awsinωt,aωcosωt,v0)。

图3 技术跨越主体受力解析图
我们通过分析技术跨越主体在技术跨越系统的受力示意图,得出跨越主体实施螺旋路径的技术跨越,必须满足以下条件:
所以跨越主体所需的驱动力为:

根据螺旋方程,可以得出螺旋曲线上任一点的切向量与X-Y平面的夹角α的正旋函数(或:
由于

且α为定值,所以由此可得:

由 (1)、(2)、(3)式知:技术跨越的驱动力 F 是由 mg、μ、V0、a、w等因素所影响的。再把(2)和(3)式代入(1)式,我们可以得到:

同样,我们可以得出实施技术跨越过程的旋进路径长度S的表达式:

实行旋进式技术跨越所需能量E的表达式:

不实行旋进的技术跨越时,即w=0,此时为直线前进:F′=mg,S′=ν0(t2-t0)。则

把(6)式除以(7)式,我们可以得到:

实行旋进式技术跨越所需的驱动力为:

不实行旋进的技术跨越所需的驱动力为F′=mg。
由此我们可以得到:

而将(2)和(3)式代入(9)式我们可以得到:

设定:在直角三角形里,我们将其中一锐角定义为β,与之相对的直角边边长记为μ,另一直角边边长记为1,由勾股定理知斜边边长为,则 tanβ=μ,β为定值,即令我们应用公式sin(α+β)=sinαcosβ+cosαsinβ,可以得到:

由于μ是定值,0<μ<1,β也是定值,β是锐角,0<β<π/2,而α则是变量,且取值范围为0到π/2。我们令
当x=α=-β时,sin(α+β)=0。故:

当x=α=0时:

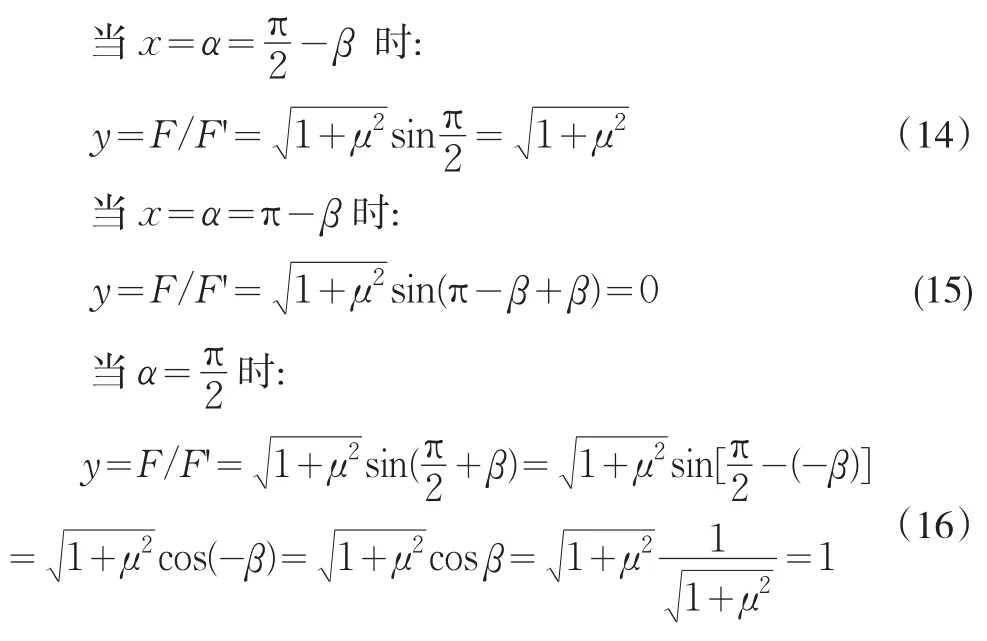
同理可以计算出当α=π/2-2β时,y=F/F′=1。具体如图4所示,由于α的取值范围为0到π/2,所以我们只取图像加粗的那部分。
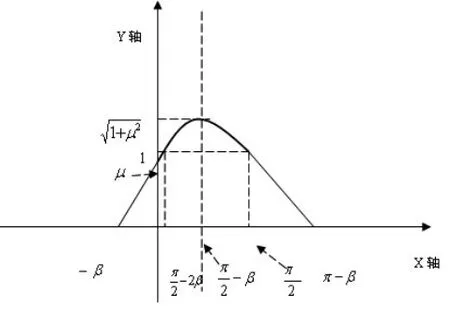
图4 驱动力函数图
结论:技术跨越主体在跨越时采取螺旋推进所需要消耗的能量要比采取直进的方式所需要消耗的能量大;当技术引进之初由于企业规模偏小,技术跨越主体对生产和管理等缺乏经验,所以此时阻力系数μ较大,而阻力系数μ越大,F/F′就会大于1,即旋进的驱动力就会大于直进的驱动力.所以,正如图1模型所示,在技术引进之初采取螺旋推进的方式进行技术跨越;而在后来,随着技术跨越对技术的消化、吸收,技术不断成熟,企业规模逐渐增大,生产与管理也逐步进入正轨,此时阻力系数μ较小,所以F/F′就会小于1,即旋进的驱动力小于直进的驱动力。所以此时无需螺旋推进方式,而是应当选择直进的方式进行技术跨越。
4 总结与展望
通过以上分析,我们可以得出:技术跨越主体在技术引进之初实施技术跨越,虽然技术跨越主体此时所需的投资成本较低,其可以依靠地理优势、政府支持等一系列有利的条件进行技术跨越,但是,此时技术跨越主体需要克服新技术范围内由科学技术知识建立起来的进入壁垒,再加上技术跨越主体缺乏对生产和管理的经验。所以此时技术跨越主体实施技术跨越时旋进系统对技术力产生的阻力系数μ较大。我们通过以上计算分析得到阻力系数μ越大,F/F′就会大于1,即技术跨越主体采取旋进的方式进行跨越所得到的外界的推动力要比采取直进的技术跨越方式获得的驱动力大。由于科学的原理和市场需求的的难以违背,所以,技术跨越主体在技术引进之初,采取螺旋推进的方式进行跨越。而随着企业不断的吸收先进技术,企业的生产和管理慢慢进入正轨,企业的规模越来越大,企业的资金成本也越来越小,企业的各方面实力不断上升,此时,企业开始吸收科研人才、加大研发投资力度,努力实施创新,此时技术跨越主体实施技术跨越时旋进系统对技术力产生的阻力系数μ开始趋小,阻力系数μ越小,F/F′就会小于1,即技术跨越主体采取直进的方式进行跨越所得到的外界的推动力要比采取旋进的技术跨越方式获得的驱动力大,而此时采取直进的方式所需要消耗的能量比旋进的方式所需要消耗的能量要小的多。所以当技术跨越主体围绕着目标主轴采取螺旋推进的方式前进的时候,正如我们的引进、消化、吸收再创新的路径模型一样,当技术积累到一定程度,技术跨越系统具有从一种状态趋达另一种状态的能力,即技术跨越是有势系统,系统演化存在突变现象,从无序转为有序,并形成良性循环的自组织现象,它会在某一个时间点,即在某个t=2nπ/ω时技术跨越主体前进方式由旋进突变为直进,从而技术跨越主体实施了技术跨越的一次自我创新。而由于市场需求规律和创新竞争压力的存在,企业需要通过对技术不断的自我创新才能领先于世界,那么企业技术跨越的路径就会成为从旋进到直进,再从直进到旋进的不断重复的过程。
本文将技术分为技术初始引进期、新技术迅速成长期、技术成熟期和技术成熟后期这四个阶段。显然,技术跨越主体在进行技术跨越时可以根据自身情况选择恰当的阶段作为自身进行技术跨越的突破窗口,而本文所建的模型则只是在技术初始引进初期的条件下才成立,是否适用所有的技术跨越阶段情形,这属于未证实研究领域。其次,影响旋进技术驱动力F与直进技术驱动力F′的大小因素为阻力系数μ及螺旋曲线上任一点的切向量与X-Y平面的夹角α,而夹角α则由旋进速度ν0、半径a、旋转角速度ω所决定,由于现实的因素和能力的有限,我们对这些影响因素并没有很精确的定量分析,没有分析在技术引进之初和企业发展规模逐渐壮大之时这些影响因素的具体变化。这些变化对于技术跨越主体选择技术跨越路径会产生哪些影响等问题,这些问题对于研究技术跨越的路径模型尚具有重要意义,还有待做更深入的探讨和研究。
[1]陈德智,王浣尘,肖宁川.技术跨越模式研究[J].中国管理科学,2002,10(Z1).
[2]张明玉等.技术跨越战略与管理[M].北京:中国经济出版社,2002.
[3]陈德智,陈香堂.技术跨越路径研究[J].科技管理研究,2006,26(7).
[4]李东华.从技术引进到自主创新-韩国技术跨越的路径分析[J].全球科技经济望,2007,(6).
[5]刘阳,王前.企业技术跨越过程的系统整体观[J].科学学与科学技术管理,2007,28,(6).
猜你喜欢
中华养生保健(2020年5期)2020-11-16
当代陕西(2019年24期)2020-01-18
中国外汇(2019年9期)2019-07-13
劳动保护(2019年3期)2019-05-16
红领巾·探索(2018年10期)2018-11-14
家庭影院技术(2018年9期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
科学与财富(2016年34期)2017-03-23
