地形图实时高精度几何校正方法探讨
2011-12-28 03:17:32杨存建王华军卢涵宇
地理与地理信息科学 2011年4期
陈 军,杨存建,王华军,卢涵宇,4
(1.成都理工大学地球探测与信息技术教育部重点实验室,四川成都 610059; 2.成都信息工程学院资源环境学院,四川成都 610225;3.四川师范大学地理与资源科学学院,四川成都 610068; 4.贵州大学计算机与信息工程系,贵州贵阳 550003)
地形图实时高精度几何校正方法探讨
陈 军1,2,杨存建3,王华军1,卢涵宇1,4
(1.成都理工大学地球探测与信息技术教育部重点实验室,四川成都 610059; 2.成都信息工程学院资源环境学院,四川成都 610225;3.四川师范大学地理与资源科学学院,四川成都 610068; 4.贵州大学计算机与信息工程系,贵州贵阳 550003)
针对手工地形图校正效率低下问题,提出地形图实时高精度自动几何校正方法。该方法使用快速直线检测算法保证了校正的实时性;根据直线检测的结果,通过模式识别和 Hough变换方程实现交点位置的高精度获取,其结果既包括原图绝大多数方里网交点,也有部分误匹配点;根据方里网空间特性,对交点在水平和垂直方向分别建立Hough变换方程,滤除所有错误交点;最后通过人工输入任意一个交点的投影坐标,对其他交点坐标自动计算,从而对原图实现自动校正。研究表明,该方法不仅运算效率和空间精度高,而且整个过程只需要少量的人工干预,使地形图实时高精度校正成为现实。
地形图;直线检测;实时高精度校正
国家标准分幅地形图是GIS重要的基础资料和数据源,纸质地形图需要扫描至计算机并按高斯投影校正才能进一步应用。几何校正一般采用手工方法输入控制点,如果要处理大量的地形图,该方式效率低下,如果能找到高精度、只需要少量人工干预的实时高精度校正方法,对地形图校正具有重要意义。地形图自动校正的关键在于方里网线的提取,由于方里网线为直线,目前主要采用 Hough变换或改进的 Hough变换[1-5],其研究主要侧重于如何提高直线检测的效果和精度[1,2],但同时也增加了时间复杂度,很难满足实时处理要求。为实现地形图校正的实时处理,本研究提出一种快速直线检测算法;在此基础上,通过分析方里网及其交点的构图特点,实现了交点位置的高精度获取和交点投影坐标的自动计算。实践证明,该算法不仅实现了校正的实时高精度处理,而且只需要少量人工干预,具有一定的实用价值。
1 快速直线检测算法
1.1 Hough变换与直线检测
方里网是由平行于投影坐标轴的两组平行线所构成的方格网(图1)。方里网线交点是地形图几何校正的控制点,地形图自动校正需要提取两组方里网线。目前主要采用 Hough变换对方里网线进行检测和提取,其方法是把二值图变换到 Hough参数计算空间(HPCS)。以直线检测为例,平面中任意一条直线可以用两个参数ρ和θ完全确定下来,其中ρ指明了该直线到原点的距离,θ确定了该直线的方位,其函数关系可表示为[3]:

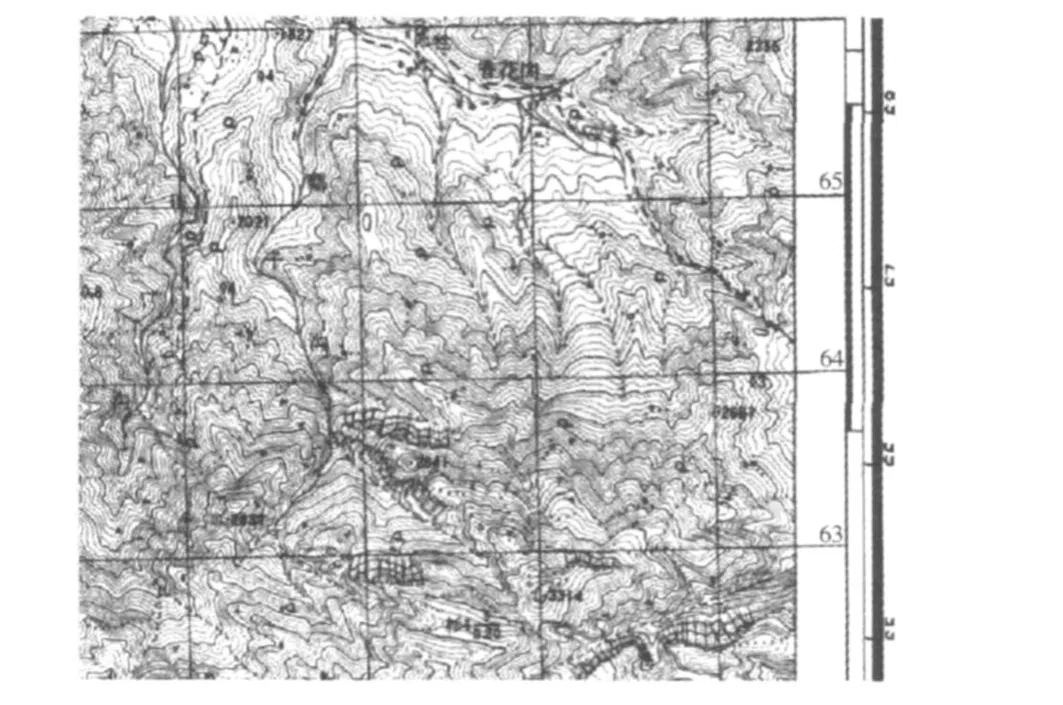
图1 地形图样区Fig.1 Sample of topographic map
传统的 Hough变换在判断直线是否存在时仅由它上面像元的个数决定,而不考虑这些像元是连在一起还是分散的,一些离散的点或几条相距很远的线段都可能被认为是一条直线。针对该缺点,前人提出了各种改进的 Hough变换算法,但很多方法在提高精度时也增加了处理时间[5-10]。
1.2 快速直线检测算法描述
地形图自动校正算法不仅需要考虑算法本身精度,还需考虑实时性。直线检测以像元为单元,对图像所有像元均做是否在直线上的判断,因此直线检测在整个处理过程中耗时最多。在地形图自动校正中,交点高精度获取是关键。如果建立既较好地提取直线信息又能保持直线空间位置不变的简单判断条件,就可实现地形图实时自动校正。直线检测是在二值图像上进行的,为描述方便,将地形图原图二值化后取值为1的像元称为前景像元。本研究对像元P是否在直线上的简单判断条件为:在角度为θ (0≤θ<π)方向上,以P为中点、长度为L的线段上所有像元中前景像元百分比大于等于阈值a(0≤a≤100),则认为P在角度为θ的直线上。
方里网线为长直线,为得到很好的检测效果,必须将检测长度设置为200像元以上;为提高检测速度,事先设置一队列。在检测每一行第一个像元时,首先置空队列,并将该像元其后长度小于等于L/2、方向为θ的所有像元按顺序添加至队列中。在检测该行其后的像元时,先将队列底部的元素弹出,并将距该像元长度等于L/2、方向为θ的像元值放入队列顶部。在队列元素增删过程中,同时设置一整型变量记录队列中前景像元个数;根据该变量值,可直接判断像元是否在方向为θ的直线上。
设水平方向方里网与x轴夹角为θ,方里网检测需分别对θ和θ+90°两个方向做直线检测。由于上述算法在判断每个像元是否在直线上时,只做了一次队列增删工作,从而保证了整幅图像的快速检测。为证明该算法的有效性,将其应用于图1所在的完整地形图(15522*10 931)进行方里网检测。参数θ取1.2°、L取200像素、a取80%,运行计算机为普通笔记本(Intel双核 T6400),总耗时仅45 s,满足实时处理要求。图1所在区域的检测效果为图2,方里网信息基本被提取出来,而且位于原方里网线的中心,证明了算法的有效性。
图2 方里网检测效果Fig.2 The result of kilometers grid detection
由于判断条件简单,检测结果还包括经纬线、图廓线以及部分错误短直线,这些信息会导致交点识别的误匹配点,需要利用方里网空间特性进行滤除。
2 基于模式识别和Hough变换的交点位置高精度提取
2.1 模式识别判识交点位置
在方里网检测图上,交点有典型的结构模式特征,即由角度θ和θ+90°两条直线相交构成。因此,如果某像元位置上存在方里网交点,则以该像元为中心,在角度θ和θ+90°两个方向一定长度内,必然存在连续的前景像元。由于方里网检测图上的直线并非由一系列单像素组成,而是具有一定栅格宽度的直线。利用上述模式特征直接提取方里网交点,会在交点附近得到大量满足条件的栅格像元,这不仅影响方里网精确定位,还影响方里网交点进一步筛选。因此,先对图2做细化处理[11-13],得到方里网线的栅格骨架,再利用上述准则判识。但是,细化后由于直线为骨架线,不能保证在给定方向上一定长度内所有像元均为前景像元,需要事先设定一阈值,即在该长度内两个方向前景像元百分比均大于该阈值,才认为存在交点。
2.2 基于Hough变换的交点位置高精度提取
为提高方里网交点定位精度,在判断交点存在时,将角度θ和θ+90°两个方向的前景像元中心坐标分别带入各自的 Hough变换直线方程(式1)中,求取两方向的直线到原点的平均距离;将平均距离代入对应的 Hough变换方程,获取方里网交点。使用上述方法对图2提取交点,检测长度为20像素,阈值为70%,得到图3所示的效果,图中白色圆点表示提取的交点。
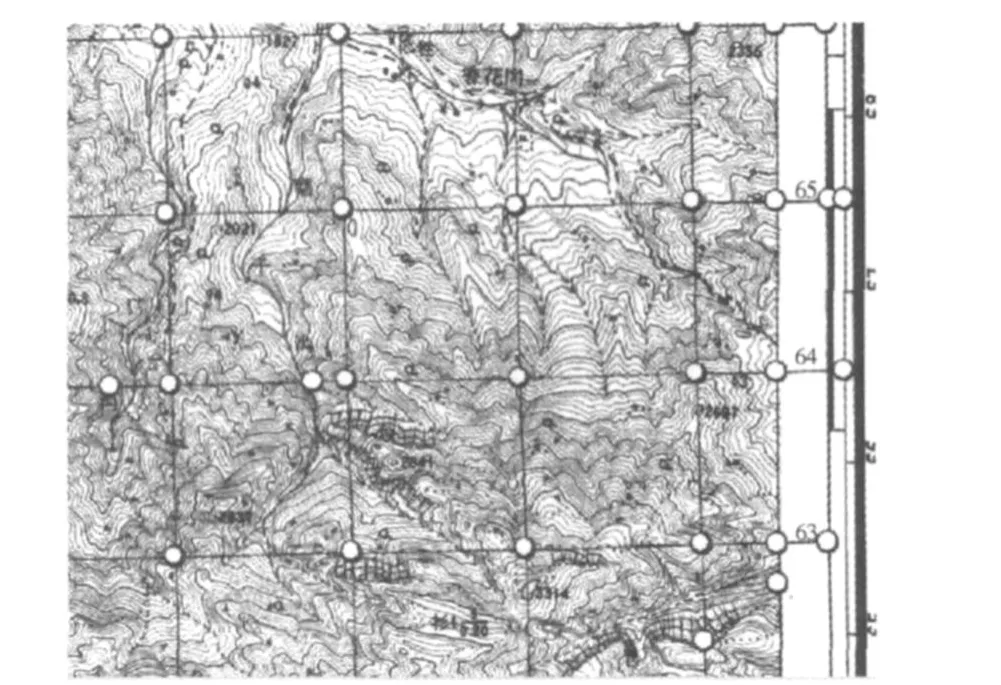
图3 方里网点初步提取效果Fig.3 The prelim inary extraction of kilometers grid intersections
本研究的测试地形图共432个方里网交点,本次共提取出704个交点,其中方里网交点425个,具体统计见表1。虽然错误交点较多,占整体比重的40%,但这些点可在后续环节筛除。如果只考察方里网点的提取率(达98%),则满足自动校正要求。

表1 初次提取统计Table 1 The statistics of prelim inary extraction
能否高精度对原图进行校正,需要评价方里网交点的空间精度。在正确的方里网交点中任选100个正确的方里网点,与人工判断比较点位差异。在选点时,将地图放大到像元级,并假定人为判断为有效点,统计结果见表2,可见自动提取的交点基本与人工判读一致,99%的点误差都在1个像元以内。误差大于1的交点处有较多注记,导致直线检测后的细化处理误差。

表2 交点误差统计Table 2 The statistics of kilometers grid intersection error
3 方里网交点的筛选与坐标自动计算
3.1 方里网交点的筛选
根据方里网点的分布规律,使用 Hough变换对提取的点进一步筛选。在给定角度的检测方向上,设方里网之间的距离为Δd,理论上各交点所在的直线距原点距离ρ应满足:

其中,k为整数,φ为常数。
考虑到提取的交点存在坐标误差,ρ与Δd应表示为:

其中,|δ|≤σ,σ为小于1的正数,表示最大允许误差。
假定方里网交点中有两个交点A1和A2,它们分别位于检测方向相邻两条平行线上,其中A1所在的直线与坐标原点的距离为φ,即在式(3)中,令k= 0,δ=0。则A2所在直线距原点距离ρA2满足:

假定任意两个交点均为方里网交点并位于相邻平行线上,代入式(3)和式(4)建立方程,获取对应的Δd′和φ′。将Δd′和φ′代入式(3)求取其他交点的δ,若满足|δ|≤σ,认为该交点位于给定检测角度的直线上。遍历其他交点,可得Δd′和φ′条件下位于直线上的交点个数N。
所有交点两两组合,统计其N值,将最大N值对应的Δd′和φ′作为检测方向上的Δd和φ,将不满足|δ|≤σ的交点从候选集合中删除。对交点在θ和θ+90°两个方向分别按上述方法进行筛选,可滤除所有误匹配点。
如果图中存在两个交点,其中一个交点位于方里网上,另一个交点在其垂直方向且其距离的k倍(k为整数)接近1个单位的方里网线距离,按上述算法得到的Δd可能为真实方里网间隔的1/k。为避免此问题,将地形图水平和垂直方里网线条数作为限制条件,如果某两交点的Δd′计算得到的方里网线条数超过阈值,则忽略该值。标准地形图的水平和垂直方里网线条数为一定值,事先设置为常量,无需与用户交互。
利用该方法对图3所示的交点进一步筛选,σ取0.05,得到的效果如图4所示。本实验最后得到422个交点全部为方里网点,错误交点全部被去除。由于图纸局部变形原因,筛选掉了3个正确交点,但从整体上看,方里网点提取率达97.7%,满足地形图校正要求。
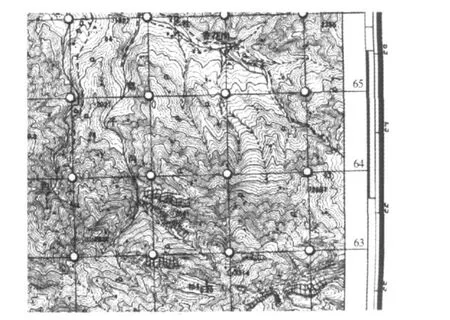
图4 方里网点最终提取效果Fig.4 The final extraction of kilometers grid intersection
3.2 方里网交点坐标自动计算
上述判别方法不仅能有效去除错误的方里网交点,而且得到两个方向的Δd和φ可用于交点坐标的自动计算。以水平方向为例,设某方里网交点坐标为(x,y),该交点和推求的方里网交点按式(3)得到的k值分别为k1和k2,方里网间距为1 000 m,则要推求的交点的纵坐标Y为:

4 结语
本文主要针对地形图自动校正提出了关键算法和流程。实例证明,算法在地形图大量噪声信息情况下,较好地分离了方里网线并得到初步的方里网交点。虽然初次提取中错误交点较多,但在进一步筛选中被全部去除,反映了该算法良好的鲁棒性。同时,所得的方里网交点均匀分布在地形图中,空间精度和个数满足自动校正要求;用户只需为其中一个点设置正确的高斯坐标,就可推算出其他方里网交点的坐标,使地形图自动高精度校正成为可能。利用本研究算法对一幅15522*10 931的完整地形图进行自动校正处理,直线检测耗时45 s,交点提取和筛选耗时30 s,自动校正耗时60 s,全部流程仅需2~3 min,并且中间只需人工输入一个点的坐标,满足实时处理要求。
该算法不仅可用于地形图自动校正,还可用于其他具有方里网的专题地图中。研究表明,该方法对提高地形图校正的自动化程度和精度具有重要意义。
[1] 李信鹏,陈甫,刘建波.基于Hough变换的地形图自动校正[J].计算机工程与应用,2007,43(1):215-217.
[2] 李关义,林友明.基于Hough变换的扫描地形图几何纠正算法研究[J].微型机与应用,2010,29(17):109-114.
[3] SURAL S,DAS P K.An MLP using Hough transform based fuzzy feature extraction Bengali Script Recognition[J].Pattern Recognition Letters,1999,20:771-782.
[4] FERNANDES L A F,OL IVEIRA M M.Real-time line detection through an imp roved Hough transform voting scheme[J]. Pattern Recognition,2008,41:299-314.
[5] 吕萌.基于Hough变换的平行直线检测改进算法研究[J].遥感技术与应用,2006,21(2):27-29.
[6] 严超华,刘高航,黎明,等.灰度图像的直接 Hough变换方法[J].航空工业学院学报,2000,14(3):36-39.
[7] 赵洪亮.基于Hough变换改进的直线检测与定位[J].激光与红外,2009,30(9):1009-1011.
[8] 胡占义,杨长江,马颂德.Hough变换的新定义[J].计算机学报,1997,20(8):744-752.
[9] 陈洪波,王强,徐晓蓉,等.基于改进 Hough变换的符号线段特征提取[J].光学精密工程,2003,11(6):632-636.
[10] 史册,徐胜荣,荆仁杰,等.实时图像处理中一种快速的直线检测算法[J].浙江大学学报,1999,33(5):482-486.
[11] 陈军,杨存建,段英杰.一种基于分区标记的快速细化方法[J].计算机应用与软件,2008,25(3):12-15.
[12] 陈建江,郑东,翟剑飞.地质图件的多阈值动态自适应二值化法及改进的二值图像细化算法[J].微型电脑应用,2004,20 (1):56-61.
[13] 杨琨,曾立波.数学形态学腐蚀膨胀运算的快速算法[J].计算机工程与应用,2005(34):54-56.
Study on Real-Time and High-Accuracy Geometric Rectif ication of Topographic Map
CHEN Jun1,2,YANG Cun-jian3,WANG Hua-jun1,LU Han-yu1,4
(1.Key Laboratory of Earth Ex p loration&Inform ation Techniques of M inistry of Education, Chengdu University of Technology,Chengdu 610059;2.Institute of Resources and Environment, Chengdu University of Information Technology,Chengdu 610225;3.Institute of Geographic and Resources, Sichuan N orm al University;Chengdu 610068;4.Department of Com puter and Information Engineering, Guizhou University,Guiyang 550003,China)
Geometric rectification of topographic map depends on the intersection coo rdinates of kilometers grid.It′s possible to make the automatic rectification if the intersections can be extracted and their coordinates be defined accurately.This paper p roposed amethod of real-time and high-accuracy geometric rectification.Firstly,a rapid algo rithm isapp lied to detect the grid lines f rom topographic map based on an array to decide w hether each pixel ison grid line o r no t.W hen detecting the first pixelof each row of the binary topographic map,the array is initialized w hich includes the fo rmer pixelsof detected angle w ithin half detected length.To detect the latter pixelsof each row the algo rithm just needs pop-up the bottom pixelof the array and addsa new pixel of detected angle at half detected length.Secondly,the intersections are extracted accurately on the detected image by pattern recognition and Hough Transfo rm fo rmula.Unfo rtunately,the result includesmany invalid points due to the interference of other line elements and noise on themap.Considering the parallel character of kilometers grid and each of them has an equal interval,a key algo rithm based on Hough Transform is p roposed to filter the right points from extracted points.As a result,invalid points are removed and the coordinatesof intersections are computed automatically w hen the user givesone p rojective coordinate among the final points.The study show s that the method can be app lied to calibrate the topographic map effectively and accurately.
topographic map;beeline detection;real-time and high-accuracy geometric rectification
TP391;P208
A
1672-0504(2011)04-0032-04
2010-12-30;
2011-03-06
国家863计划项目(2009AA 12Z140)
陈军(1979-),男,博士研究生,讲师,主要研究方向为遥感与GIS技术。E-mail:gischenjun04@yahoo.com.cn
猜你喜欢
学生导报·东方少年(2019年7期)2019-06-11 11:03:18
电子测试(2018年14期)2018-09-26 06:04:42
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
数学学习与研究(2017年11期)2017-06-20 00:02:38
青年时代(2017年3期)2017-02-17 01:40:47
光学精密工程(2016年3期)2016-11-07 09:03:34
现代工业经济和信息化(2016年12期)2016-05-17 05:38:01
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41
计算机与网络(2014年18期)2014-04-16 04:49:58