
直升机载空空导弹复合制导系统的交接误差分析*
2011-12-07 08:04任宏光程海彬
弹箭与制导学报 2011年4期
任宏光,程海彬
(中国空空导弹研究院,河南洛阳 471009〕
0 引言
复合制导的空空导弹其特点是整个制导过程分为中制导段和末制导段,由于对各个制导段的性能要求不同,相应采用不同的制导律。当导弹由一种制导方法变为另一种制导方法,即由一种制导装置转为另一种制导装置时,会出现各种弹道或设备要求的偏差,这就引起了交接段交接问题,交接问题是任何复合制导系统所要解决的关键技术之一。文中针对捷联惯导+红外末制导类型的直升机载复合制导的空空导弹,分析其在交接段导引头的目标指向偏差问题。
1 截获条件分析
红外导引头对目标截获的条件主要有:目标处于导引头的有效作用距离和在导引头有效视场之内。通常,将导弹导引至有效距离内一般不存在问题,下面针对角度截获条件进行分析。
角度截获问题的根源在于进行末制导的导引头总有一个有限的视场,如果交接段时目标在视场之外则不能被截获。为了保证截获,把位标器轴在末制导开始前预偏到计算出的目标视线方向是绝对必要的。然而由于存在理论上无法确定的各种误差因素,它们会造成实际上的目标指向与导引头指向之间的不一致。
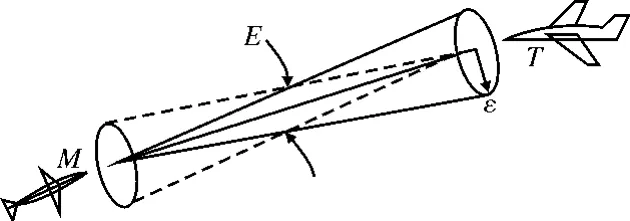
图1 角截获几何关系图
导弹对目标角度截获的几何关系如图1所示,E为导引头有效视场,只有目标落入E角时才能被截获,这就决定了目标弹道散布的最大允许误差为ε。如果以目标为基准,导弹位置预报误差只有在≤ε才能实现截获。实际上MT的指向是靠导引头预偏形成,任何导弹姿态角的预报误差都直接影响到MT在惯性空间的正确方向,而使指向误差增大。此外,还有预偏信号形成误差、伺服误差、弹体运动耦合误差等,所有这些因素都将引起目标视线角误差。
2 影响交接段角截获的各项因素
在交接段利用载机的雷达系统对目标的跟踪测算出目标位置、速度和加速度信号,通过指令系统传输给导弹。弹上惯导系统提供导弹相应信息经过坐标转换折算成弹体坐标系内视线方向,弹上设备据此进行位标器轴的指向预定。但是,经预定后的位标器指向与实际的目标所在方向上仍然存在误差,主要的影响因素如下:
1)目标位置测量误差ε1:如图2,目标测量位置T,而目标的实际位置可能在 T1、T2、T3,这是由测角误差形成的,T1T2、T1T3则是由测距误差形成的。针对直升机载毫米波雷达测距、测角的误差都非常微小,测距精度一般在≤10m,测角精度≤1mrad。取R=6km,由此折算TT1=6m,TT2=11.7m,暂取ε1=TT2sin 45°=8.3m。
2)目标数据的变换、转换和传输延迟误差ε2,取决于计算精度及数据处理延迟等,取为0.2°。
3)导弹位置预告误差ε3:导弹位置是由弹载捷联惯导系统经过导航计算给出的,取决于捷联惯导精度和飞行环境条件等,以低成本捷联惯导导航误差为基准,导航20s后,北天东定位误差ΔX、ΔY、ΔZ 均为50m(cep);
4)导弹姿态预告误差ε4:导弹姿态误差取决于动基座传递对准精度、陀螺零漂等,导航20s后弹载惯导系统的姿态误差取为0.3°。
5)预偏信号形成误差ε5:此项误差包括矢量间角度计算误差、坐标转换误差等,取决于所采用计算机计算精度等,取ε5=0.2°。
6)目标机动误差ε6:针对直升机目标取2g机动,在有数据链不断修正目标位置的情况下,以2s为指令周期,则周期内最大位置误差为39m,此时取ε6=13m。
7)伺服机构误差ε7:导引头伺服机构响应指令后,导引头预偏误差项,其大小取决于机构执行能力,取ε7=0.3°。
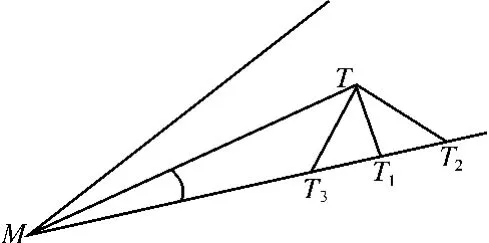
图2 目标位置测量散布
3 交接段综合指向误差角推证
以上列举了角截获的各种主要误差源,各项误差数据所对应的坐标系是不相同的,虽然如此,从统计意义上说,可以认为给出的误差数据,其数量级适用于以上各种坐标系,根据这种假设,综合指向误差只需要把各误差项由弹体系转到视线坐标系即可。
视线系指向误差关系如图3所示。图中xs(T)轴指向真实目标,而T()
c则代表位标器实际指向,为总的指向角误差:
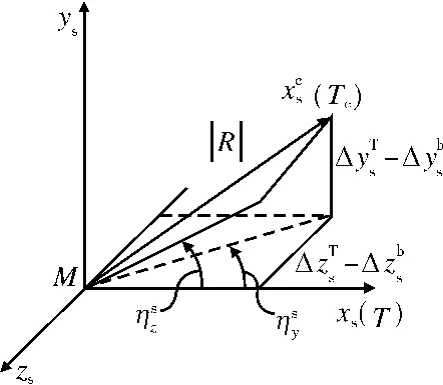
图3 视线偏差角定义
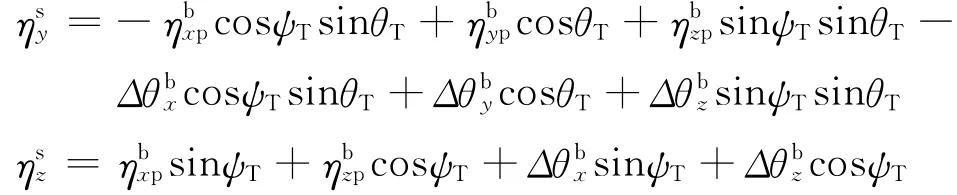
计算的视线矢量在视线坐标系中的角位置之所以用沿视线坐标轴的两个转角表示,是因为视线坐标系的选取,总可以使沿Mcxs视线角误差为零,这只要将Myszs平面绕xs轴旋转适当的角度,而这种旋转并不影响导弹寻的导引头对目标的截获,它只会使目标落入导引头视场的象限不同。遵循各种误差源相互独立的假设,则有在弹体系中的指向误差为:
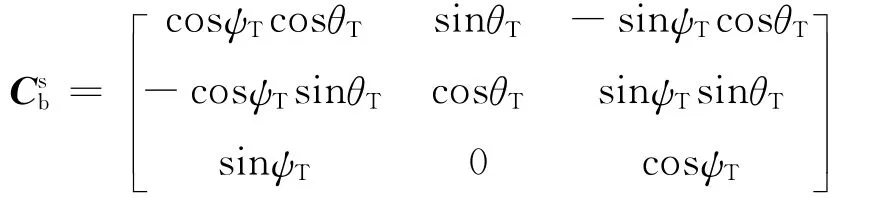
将导弹至目标中心的连线所构成的距离矢量定义为弹目视线矢量,以弹目视线矢量为一个坐标轴定义一个视线坐标系Mxsyszs,如图4所示。视线系相对弹体系是由两个伺服角度ψT和θT构成,其值可以通过下式求得:

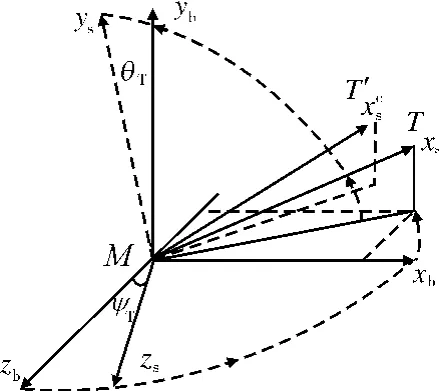
图4 目标视线矢量及指向角偏差
式中:(xb,yb,zb)为导弹惯导系统给出的导弹位置在弹体坐标系中的3个分量;(xT,yT,zT)为目标位置预测数据在弹体坐标中的3个分量为弹目距离:

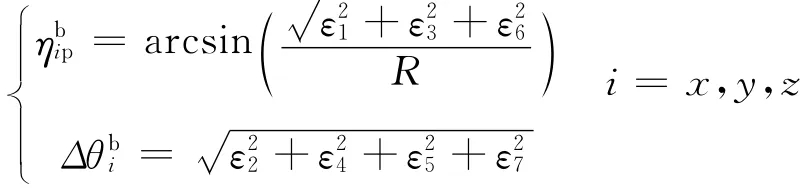
由于小角可以看作是矢量,符合矢量的投影法则,视线系下角度可如下求取:


它表示在以导弹目标视线为轴,以ηcep为半顶角的圆锥面内部区域中。而要求目标落入概率为99%的圆半径为:

在实际应用中,以ηcep或η99为导弹捷联惯导系统的导航精度指标,可较好的反映出在中制导转换末制导的时刻,导弹对中制导导航精度要求。
4 计算分析
针对以上分析,取一种典型的误差分配方式,即认为在弹体系内的位置误差在三个正交方向上相同,取取R=6km;对于角度误差取ys、zs两个轴向角度相同,xs方向角度只计算惯导系统水平定位精度即可。在以上假设条件下,对有、无数据链和不同对准精度的情况进行定量分析。
根据以上,在不同跟踪视场角时y、z轴向的指向误差如表1所示。
表中前两项数据η99>3°超过瞬时视场角,无法达到99%的角度截获要求。而第三项数据可以使η99数值有效的减小到3°以下,所以为了达到99%的角度截获要求可采取有效措施:
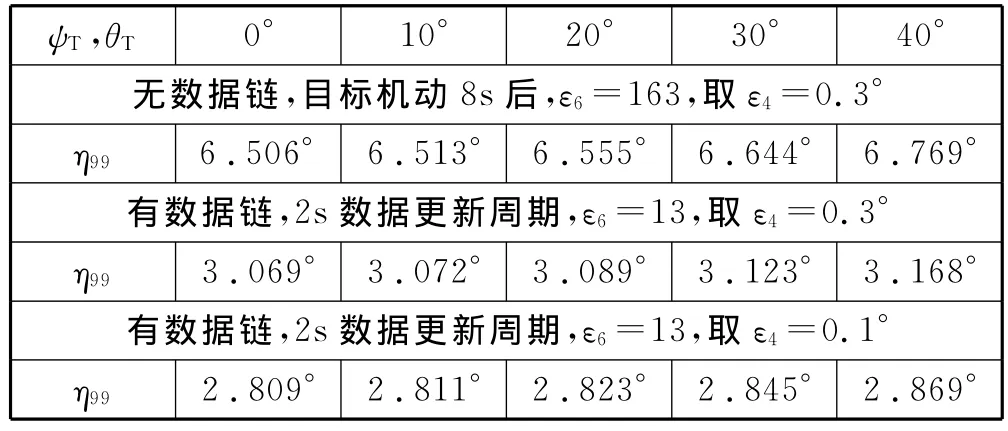
表1 不同跟踪视场角时y、z轴向的指向误差
第一,加数据链,以有效减小η99的值;
第二,提高导弹对准精度、定位精度等,当对准误差ε4<0.15°或定位误差ε3<40m可得η99<3°;
第三,导引头在末端进行角度搜索。
5 结论
文中对捷联惯导+红外末制导类型的直升机载复合制导空空导弹交接段的导引头指向误差问题进行了计算分析,给出了它的计算公式,并根据分析结果,给出了有效减小指向偏差角的三项建议,这对于发展红外复合制导的直升机载空空导弹工作具指导作用。
[1]David H Titterton,John L Weston.捷联惯性导航技术[M].张天光,王秀萍,王丽霞,等译.2版.北京:国防工业出版社,2007.
[2]秦玉亮,李宏,王宏强,等.复合导引头交接班成功概率的建模与仿真[J].系统仿真学报,2009,21(15):4736-4738.
[3]M Weiss,D Bucco.Handover analysis for tactical guided weapons using the adjoint method,AIAA 2005-6157[R].2005.
[4]彭琛,吴森堂.反舰导弹中/末制导交班点目标捕捉方法研究[J].飞行力学,2008,26(2):37-40.
[5]谢希权,易华.多目标攻击空空导弹的目标截获概率分析[J].电光与控制,2001(2):33-36.
[6]朱莉,张国权,王光明.中末制导交接班半实物实验研究[J].空军工程大学学报,2007,8(1):41-43.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
舰船科学技术(2022年10期)2022-06-17
科学技术创新(2021年25期)2021-09-11
北京航空航天大学学报(2018年1期)2018-04-20
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12
