
多特征互补的红外与光学图像匹配方法*
2011-12-07 08:05周伟,刘丰,刘婧
弹箭与制导学报 2011年5期
周 伟,刘 丰,刘 婧
(第二炮兵工程学院,西安 710025)
0 引言
图像特征作为图像的表征之一被广泛应用于图像处理领域中,尤其在多传感图像匹配识别中,由于二者图像灰度差异大,采用基于灰度的匹配方法产生较大的误差,而提取多传感器图像之间的不变特征进行匹配,成为解决这一问题的有效途径[1]。
尺度不变特征变换[2](scale invariant feature transform,SIFT)是目前国内外特征点匹配研究领域的热点与难点,其匹配能力较强,可以处理两幅图像之间发生平移、旋转、仿射变换情况下的匹配问题。SIFT算法在特征检测阶段采用DoG算子检测特征,该检测子主要检测团块类目标,但对于多源图像,如可见光与红外图像,其灰度差异较大,DoG检测到的特征重复率低,从而影响匹配率。针对这一问题,对于光学与红外图像,分别检测DoG与Harris-Laplace特征,同时提出了一种改进的DoG检测算法,改善了特征的分布,并将两特征用SIFT算子描述,之后进行匹配,实验结果表明,文中方法有效提高了匹配率。
1 DoG检测子
兴趣点检测是图像匹配算法中关键的一步,特征并不是越多越好,过多特征在生成描述子时需要大量时间,而且还影响匹配精度。因此文中提出了一种改进的DoG检测子,在不影响特征表征性的前提下,改善特征在图像中的分布,从而提高检测精度。
1.1 DoG检测子
为了在尺度空间检测到稳定的关键点,SIFT采用高斯差分尺度空间(DoG scale-space),即利用不同尺度的高斯差分核与图像卷积生成。

DoG算子计算简单,是尺度归一化的LoG算子的近似。图像金字塔的构建:图像金字塔共O组,每组有S层,下一组的图像由上一组图像降采样得到。图1是两组高斯尺度空间图像示例金字塔的构建。

图1 高斯差分与图像金字塔示意图[3]
为了寻找尺度空间的极值点,每一个采样点要和它所有的相邻点比较,看其是否为图像域和尺度域的极值。如图2所示,中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。之后进行像素的预筛选,小于一定阈值的像素点被排除。图3中左边图像为DoG检测子的检测结果。
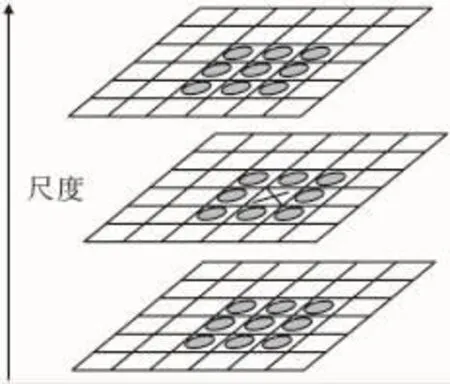
图2 DoG空间局部极值检测
1.2 改进DoG检测子

其中xi是特征点位置,O是所有特征点位置的集合,cr是鲁棒性参数(可以设置为0.9)。这样就保证了非极大值抑制的像素邻域是不同的。
上述思想虽然改善了兴趣点的分布,但花费时间较原DoG算法多,因此,文中不是顺序的遍历整个尺度空间来寻找关键点,而是随机搜索尺度空间,直到找到所需的特征点个数为止。
DoG主要用来检测团块类目标,因此兴趣点也主要位于团块区域,即明显比背景暗或亮的区域,局部极值不可能位于平坦区域或其邻域。局部极值的另一个可能位置为毛刺区域,例如灰度快速改变的狭窄区域。但由于构建DoG尺度空间时,对图像进行了多次平滑,只有粗尺度中信息被保留,而且毛刺被滤除。因
为了使特征点更好的分布于图像内,文中对DoG检测子进行了改进,即在更大的范围中检测极值。即在当前尺度长度为2r的邻域内,以及上下相邻尺度9×2个点共(4r2-1+18)个点比较,r定义如下:此,文中改进算法包含两个步骤:首先对于一个点xi,DoG(xi)大于一定阈值时,即为团块区域,之后判断该点是否为局部极值,当发现局部极值或给定的试验次数满足时搜索结束;如果DoG(xi)小于一定阈值时为非团块区域,该区域的搜索结果忽略,搜索从其它位置重新开始。算法描述见表1:
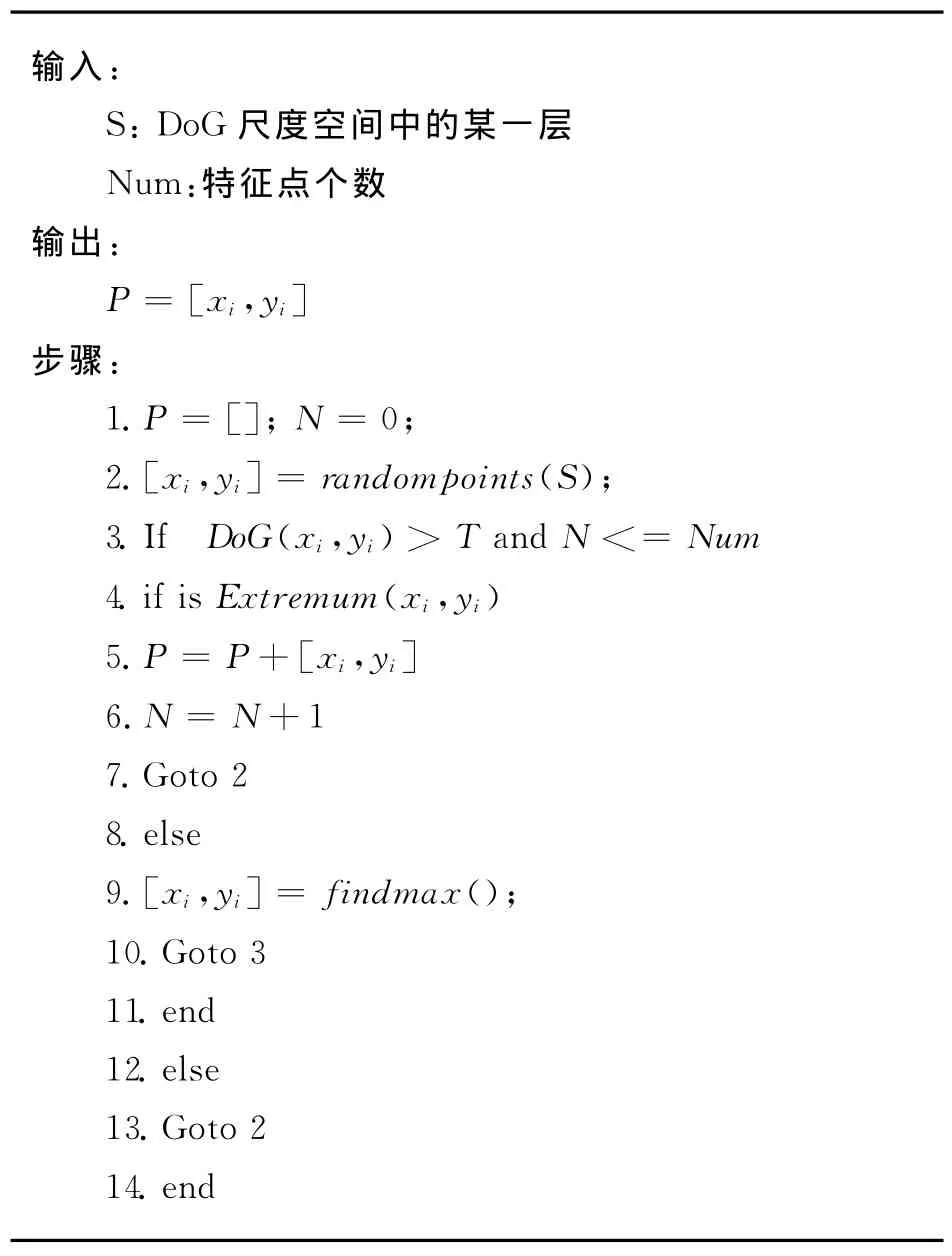
表1 改进DoG算法
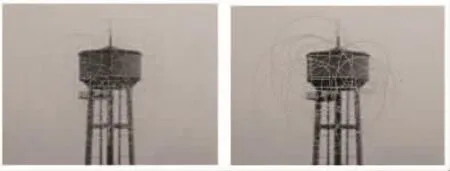
图3 DoG检测子与改进检测检测结果
图3为两算法检测结果比较,左边图像为DoG算法检测结果,共检测到121个关键点,右边图像为改进算法当Num设置为30时的检测结果,由图中可以看出,改进算法可以减少特征点检测数量,使特征更好的分布于图像内,利于后续的匹配识别。最后的实验结果将说明改进DoG算法优于原算法。
2 Harris-Laplace检测子
DoG检测特征时,为了得到更加稳定的特征点,消除了边缘点。对于多源图像来说,其灰度差异大,而边缘信息是至关重要的。因此,在特征检测阶段,引入Harris-Laplace检测子,它可以检测角点类型的特征,这样可以弥补DoG检测子的不足。Harris-Laplace检测子是 Mikolajczyk and Schmid[4]提出的具有尺度不变性的检测子,其检测步骤为:
Step1:在尺度空间中用Harris[5]检测子寻找极值点。Harris角点检测矩阵为:

局部图像导数由尺度为σD(微分尺度)的高斯核计算得到。矩阵的特征值表示点的邻域两个正交方向上主要信号的改变。实际应用中,用下式来检测角点:

而det(M)表示矩阵M行列式的值,而trace(M)表示矩阵M的迹。采用非极大值抑制可以提取cornerness函数的局部最大值作为角点。Harris角点具有平移和旋转不变性,而且在光照条件变化时也很稳定。
Step2:在上一步所求极值点的空间位置上,寻找极值点所在尺度邻域(如0.7σ~1.4σ)内LoG函数响应的极值点。LoG函数定义为:

Step3:在第二步所求的极值点尺度上,用Harris Detector寻找极值点所在空间邻域内的极值点。
Step4:如果第三步极值点的位置发生了变换,则返回到第二步,如此反复,直到最后求得的极值点在空间上的Harris Detecor和尺度邻域内的LoG空间同时取得极值。
通过上述步骤检测出的区域具有尺度不变性。图4为可见光与红外图像分别检测到的Harris-Laplace特征。

图4 可见光与红外水塔图像Harris-Laplace特征
3 SIFT描述子
对于上述改进的DoG检测子与Harris-Laplace检测子检测到的关键点都具有三个信息:位置、所处尺度、方向。之后将每个关键点采用SIFT描述子进行描述。首先将坐标轴旋转为关键点的方向,以确保旋转不变性。

图5 由关键点邻域梯度信息生成特征向量[6]
接下来以关键点为中心取8×8的窗口。图5左部分的中央黑点为当前关键点的位置,每个小格代表关键点邻域所在尺度空间的一个像素,箭头方向代表该像素的梯度方向,箭头长度代表梯度模值,图中的圆圈代表高斯加权的范围(越靠近关键点的像素梯度方向信息贡献越大)。然后在每4×4的小块上计算8个方向的梯度方向直方图,绘制每个梯度方向的累加值,即可形成一个种子点,如图5右部分所示。此图中一个关键点由2×2共4个种子点组成,每个种子点有8个方向向量信息。这种邻域方向性信息联合的思想增强了算法抗噪声的能力,同时对于含有定位误差的特征匹配也提供了较好的容错性。实际计算过程中,为了增强匹配的稳健性,Lowe建议对每个关键点使用4×4共16个种子点来描述,这样对于一个关键点就可以产生128个数据,即最终形成128维的SIFT特征向量。
4 实验结果与分析
为了验证文中算法的有效性,在Pentium 4,3.0 GHz CPU,2.0GRAM的PC机上采用Matlab编程实验了文中所提算法。对5组场景的可见光与红外图像进行了试验,SIFT算法采用DoG+SIFT,而文中算法采用改进DoG+Harris-Laplace+SIFT,实验结果如表2所示。

表2 算法比较结果
由于篇幅限制,这里只给出第一组场景的匹配图像,如图6所示。由图中可以看出,采用原SIFT算法有2个匹配点对,其中1个为误匹配,正确率为50%,而采用文中算法有53个匹配点对,其中2个为误匹配点,正确率为96.2%。

图6 SIFT算法与改进SIFT算法匹配结果比较
对于本算法中,随着关键点的增多,算法的时间复杂度也增加,实际应用中,为了满足实时性,可以采用许多加速算法,如用积分图像加速高斯滤波过程,用DoM代替DoG,用PCA-SIFT代替SIFT等,这都可以加速算法执行。
由表2可以看出,算法1对于多源图像匹配效果不好,匹配点非常少,而且正确率很低。而文中算法针对传感器图像灰度差异大,SIFT算法中DoG检测子检测团块类目标受灰度影响大,容易造成误匹配的问题,在特征检测阶段,将DoG特征与Harris-Laplace特征相结合,同时为了消除DoG特征对算法正确率的影响,对其进行了改进,在不影响特征表征性的同时,减少DoG特征的数量,从而在提高匹配正确率的同时,有效减少了误匹配点,这对于多源图像匹配识别来说是至关重要的。
[1]Thourn K,Kitjaidure Y.Multi-view shape recognition based on principal component analysis[C]//Advanced Computer Control,ICACC′09,2009:265-269.
[2]Lowe D G.Distinctive image features from scale-lnvariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-10.
[3]Song R,Szymanski J.Well-distributed SIFT features[J].Electronics Letters,2009,45(6):308-310.
[4]Mikolajczyk K,Schmid C.Scale and affine invariant interest point detectors[J].International Journal of Computer Vision,2004,60(1):63-86.
[5]Harris Stephens M.A combined corner and edge detector[C]//Alvey88,1988:147-152.
[6]Lowe D G.Local feature view clustering for 3Dobject recognition[C]// Proc.of the IEEE Conference on Computer Vision and Pattern Recognition,2001.
猜你喜欢
农业工程学报(2022年7期)2022-07-09
新世纪智能(数学备考)(2021年10期)2021-12-21
新世纪智能(数学备考)(2021年10期)2021-12-21
逻辑学研究(2021年3期)2021-09-29
新世纪智能(数学备考)(2020年10期)2021-01-04
矿产勘查(2020年8期)2020-12-25
语数外学习·高中版中旬(2020年10期)2020-09-10
计算机应用与软件(2018年12期)2018-12-13
魅力中国(2016年42期)2017-07-05
软件导刊(2015年8期)2015-09-18
