
捷联姿态系统的误差分配算法设计*
2011-12-07 08:05:04高洪宇张崇猛舒东亮
弹箭与制导学报 2011年5期
陈 辞,高洪宇,张崇猛,舒东亮
(1海军驻大连造船厂军事代表室,辽宁大连 116005;2天津航海仪器研究所,天津 300131)
0 引言
在纯惯导状态下,由于存在加速度计误差和陀螺误差,捷联惯导系统的姿态误差存在较大幅值震荡,难以满足长时间提供较高精度姿态的需求。因此,为了提高系统的性价比,需要加入外部参考速度信息,构成捷联式罗经姿态系统,将姿态误差抑制在一定范围内,从而长时间提供高精度的姿态信息。在系统的研制阶段,需要对惯性元件和测速装置的误差引起的系统姿态误差进行分析,并确定所研制系统需要采用惯性元件和测速装置的精度,即进行误差分配[1]。
平台式罗经系统已非常成熟,其通过在水平回路和方位回路中引入阻尼环节,调整对陀螺的控制量,从而使平台精确的保持水平和航向。利用与其此相同的原理,在水平回路计算和方位回路计算过程中引入阻尼环节,可使捷联式惯性导航系统处于罗经工作状态,长时间提供精度较高的姿态信息。目前已有精度较高的捷联罗经姿态系统研制完成并得到大量使用,如法国的 Octans[2-3],该系统使用的陀螺为光纤陀螺。
1 捷联惯导系统的误差
捷联惯导系统的误差方程与平台式惯导系统的误差方程是等效的[4]。如式(1)所示[5]:
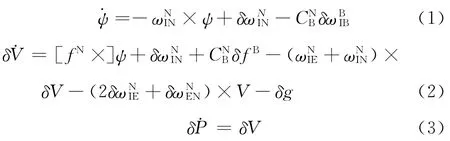
式中:ψ为姿态误差;δV为速度误差;δg为重力加速度误差;δP为位置误差;I表示惯性坐标系;E表示地球坐标系;N表示当地地理坐标系;B表示载体坐标系。
式(1)中的陀螺组件误差δωBIB包括陀螺常漂、标度误差、安装误差和随机误差,其可用等效到地理坐标系的陀螺漂移表示,如式(4)所示。同样,加速度计组件误差δfB包括加速度计零偏、标度误差、安装误差和随机误差,其也可用等效到地理坐标系的加速度计零偏表示,如式(5)所示。

根据上述误差方程,可得捷联惯导系统的误差框图如图1所示。Ω为地球自转角速率;φ为当地维度;R为地球半径;g为地球重力加速度。图中省略了垂向通道的误差计算。

图1 捷联惯导系统的误差框图
2 罗经回路及其误差分析
如图1所示,在北向水平回路中,存在着由航向角误差引起的等效陀螺漂移ψzΩcosφ,从而引起东向水平姿态误差ψx的变化,这种影响称为罗经效应。利用罗经效应,通过设计适当的阻尼网络,将东向水平姿态误差引入航向角计算环节,形成罗经回路,从而减小航向角误差,使系统输出在一定误差范围内的航向。同样,在东向水平回路中加入阻尼环节,也可使系统输出在一定误差范围内的水平姿态。罗经回路及水平回路中阻尼网络的设计与平台式阻尼网络的设计原理和方法相同[6]。
加入阻尼网络后罗经系统东向水平回路的误差框图如图2所示,罗经回路的误差方框图如图3所示。图2所示为多输入单输出系统,图3所示为多输入多输出系统。系统对准后,处于稳定状态,因此系统的误差主要由稳态误差决定。

图2 系统东向水平回路的误差框图
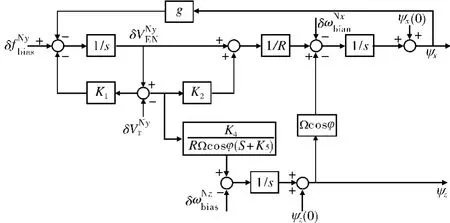
图3 系统罗经回路的误差框图

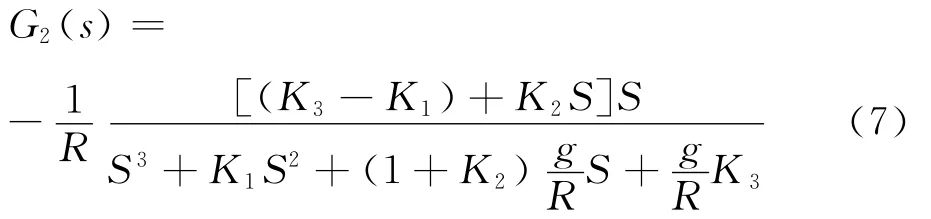
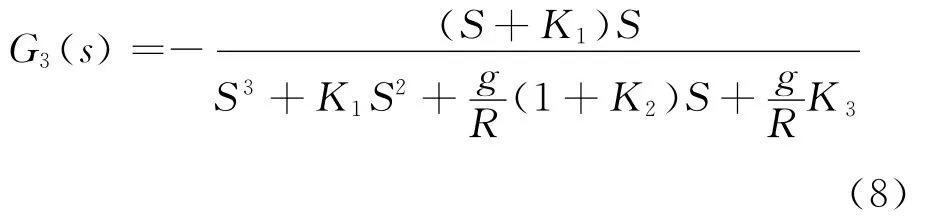
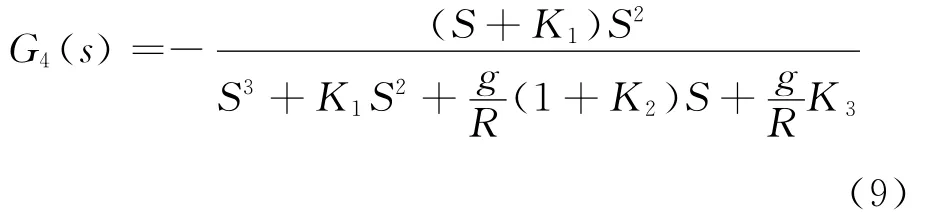
式(6)传递函数为0型系统,式(7)和式(8)为Ⅰ型系统,式(9)为 Ⅱ 型系统。因此,在稳态条件下,ψy仅与δ有关。即:

在罗经回路中,适当的选择K2、K4和K5后,的影响很小,可以忽略。
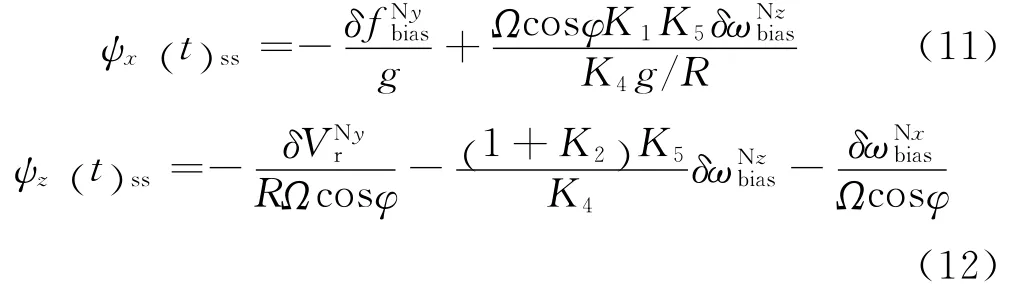
经上述分析,对于采用罗经方式的捷联姿态系统,稳态下其水平姿态误差主要由加速度计的零偏决定,成一定的比例关系;航向误差主要由东向陀螺漂移和北向参考速度误差决定。
3 仿真结果
在捷联姿态系统中采用罗经方案,针对现有陀螺和加速度计的性能进行了动态仿真。陀螺误差如表1所示,加速度计误差如表2所示,系统摇摆条件如表3所示。仿真的纬度为39.183°,航向45°,参 考 速 度 误 差0.2kn,导航时间为8h。系统姿态角误差的仿真结果如图4、图5和图6所示。最大姿态误差如表4所示。

图4 横摇角误差

图5 纵摇角误差
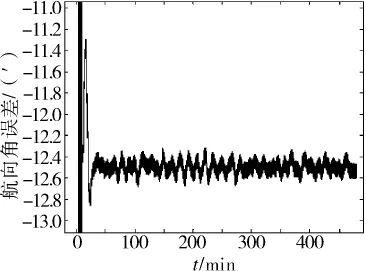
图6 航向角误差

表1 陀螺组件误差

表2 加表组件误差
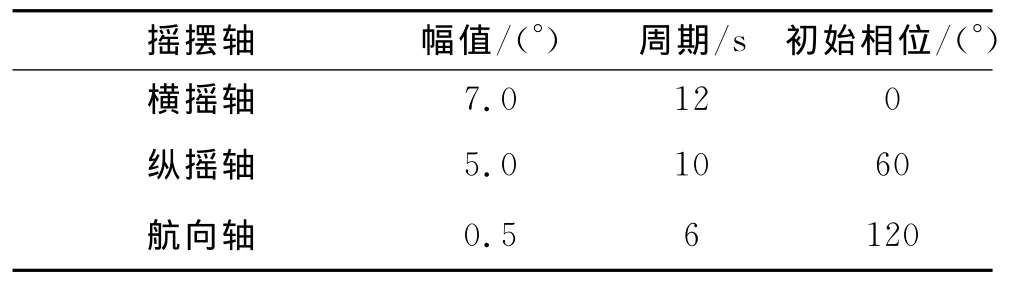
表3 系统摇摆规律

表4 系统最大姿态误差
4 结论
在东向水平通道和航向通道中加入阻尼环节,系统工作在罗经状态下,系统的姿态信息可以抑制在较小的误差范围内。在稳定状态下,北向水平姿态误差仅与东向加速度计零偏有关,东向水平姿态误差仅与北向加速度计零偏和天向陀螺漂移有关,其中主要起作用的是加速度计零偏;航向角误差仅与北向参考速度误差、天向陀螺漂移和东向陀螺漂移有关,其中主要起作用的是北向参考速度和东向陀螺漂移。通过计算机仿真可以看出针对捷联姿态系统中采用罗经方案设计的姿态误差分配算法的正确性。
[1]James E Kain,James R Cloutier.Rapid transfer alignment for tactical weapon applications[C]//Proceedings of AIAA Guidance,Navigation and Control Conference,1989:1290-1300.
[2]T Gaiffe,Y Cottreau,N Faussot,et al.Marine fiberoptic gyrocompass with integral motion sensor[C]//DGON 99,Stuttgart,15.0-15.7.
[3]T Gaiffe,Y Cottreau,N Faussot,et al.Highly compact fiber optic gyrocompass for applications at depth up to 3000meters[C]//Underwater Technology,2000,UT 00.Proceedings of the 2000International Symposium,2000:155-160.
[4]Weinred A,Bar-Itzhack I Y.The Psi-angle error equation in strapdown inertial navigation systems[J].IEEE Transaction on Aerospace and Electronic Systems,1978,AES-14(3):539-542.
[5]D H Titterton,J L Weston.Strapdown inertial navigation technology[M].London:Peter Peregrinus Ltd.,1997:119-147.
[6]黄德鸣,程禄.惯性导航系统[M].北京:国防工业出版社,1992:107-150.
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:08
船海工程(2021年1期)2021-03-02 05:32:02
中国船检(2020年10期)2020-11-07 09:56:38
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
光学精密工程(2016年5期)2016-11-07 09:06:41
火控雷达技术(2016年1期)2016-02-06 02:18:01
