
基于Hough变换的高分辨率遥感影像道路提取方法研究
2011-11-29 07:49余峰余洁简骁
铁道勘察 2011年5期
余 峰 余 洁 简 骁
(1.武汉大学遥感信息工程学院,湖北武汉 430079;2.中铁工程设计咨询集团有限公司,北京 100055)
由于道路目标复杂的光谱与形状特征,在遥感图像上进行道路网提取一直被认为是一个难点,遥感工作者们为解决此问题进行了大量不懈的努力[1]。现有的遥感影像道路提取方法可分为自动和半自动提取两类,自动提取方法包括道路的自动定位和理解,一般由道路段检测、道路跟踪、道路连接三个步骤组成。目前,该方面研究还处于理论研究状态,主要是对某一种类型道路(如高速公路)进行识别,还无法进行各类道路的自动识别。半自动道路提取则是由人提供初始道路点(有时还提供初始方向),在此基础上进行道路的跟踪、连接、提取。半自动提取方法作为当前的研究热点,比较具有实用意义。
基于Hough变换的道路提取方法是一种半自动提取方法,它能有效提取高分辨率遥感影像上直线段道路[2],但仍存在一定的局限性,如对影像分割依赖性大、受非道路因素影响大。为克服以上两点不足,在前人研究的基础上,分析道路在高分辨率遥感影像上光谱特征与形态特征,设计了一种提高影像分割有效性的交互式道路信息提取方法,提出直线段匹配的方法对非道路信息进行去噪处理,并运用Hough变换的方法检测和提取高分辨率遥感影像上的道路。
1 道路特征分析与提取流程
遥感影像光谱、辐射、空间和时间特征决定影像的视觉效果,表现形式和计算特点,并导致物体在影像上的差别。要从影像上提取地物,必须要认识和提取地物的特征。道路在遥感图像上之所以能和其他地物区分开来就是因为道路有其自身的特征,例如光谱特征、形状特征,这些特征使得道路在遥感图像上表现为自身的色调、反差、形状、纹理等。这些特征就是道路能够从高分辨率遥感影像中提取出来的依据。道路的基本特征有以下几种。
(1)几何特征:在高分辨率影像上,道路呈长条状,其长度远大于其宽度,道路的宽度可以识别并且变化比较小,曲率有一定的限制。
(2)辐射特征:道路一般有两条明显的边缘,其内部灰度与其相邻区域灰度反差比较大,城市道路有护栏、天桥、行树以及汽车等的影响,灰度可能不一致,甚至会阻断道路在视觉效果上的连通性。
(3)拓扑特征:道路一般是相连的,除非到了影像边缘一般不会突然中断,也一般不会突然冒出一段,一般会形成道路网;这个特征可以很好地补充辐射特征的不足。
(4)上下文特征:上下文特征指的是与道路相关的影像特征,如道路旁的建筑物和行道树,是城市道路还是乡间道路。
为充分利用高分辨率遥感影像上道路辐射特征,设计了一种交互式信息提取方法,以提高影像分割效果。然后根据道路几何特征,提出直线段匹配的方法对非道路信息进行去噪处理,最后运用Hough变换的方法检测提取高分辨率遥感影像上的道路(如图1所示)。

图1 道路提取流程
2 道路提取方法
2.1 交互式道路信息采集
在高分辨率遥感影像上,识别道路主要是基于道路的光谱特征与形态特征,这也是道路提取的基础与出发点。道路的光谱特征在高分辨率遥感影像上表现为一定的灰度信息,根据道路的灰度信息对影像进行分割并二值化通常是道路提取的第一步,也是非常关键的一个步骤。现实中道路自身材质的复杂性以及非道路信息(建筑物、汽车、行人)的影响,使得道路在高分辨率遥感影像上表现出灰度的多样性与复杂(不纯)性。因此,道路信息采集的准确性与完整性直接影响到后续处理的各个环节以至最终提取结果。
当前研究道路信息采集的方法大多是由用户给定一个道路点和阈值,然后判断其他像素是否是道路点。这种方法有两个缺点:一是只给一个道路点,样本太少。由于存在同物异谱的现象,有的道路点可能由于材质、积水等原因会被误认为非道路点。二是阈值难于确定。
针对上述两个缺点,采取一种交互式道路信息采集的方法进行改进。信息采集时,用户可以选择多个道路区域,而不是一个道路点,每个道路区域对应于一种光谱特征的道路,从而解决同物异谱的问题。同时把每个道路区域统计的方差作为判断对应道路的阈值,这样就能较好地解决第二个问题。
程序设计时,用户可以随时根据道路情况增加、删除、融合道路样本区域,以提高程序的交互程度。
完成道路信息采集后,需对影像进行二值化。首先对样本区域进行统计分析,获得道路区域的灰度平均值MeanValue和标准差m_gray,作为道路样本的特征值。统计分析多个样本区域后获得多个样本特征值,而后对每个像素用下列公式判断是否为道路点,符合则设为1,否则设为0。

Gray_Value为待判断像素的灰度值,对应于彩色影像,须每个颜色分量都满足上述条件。
通过上述交互式的道路信息采集方法,能够确保影像中所有道路都能够被分割出来(不至于被漏掉),为后续处理打下基础。
2.2 直线段匹配去噪
影像分割完成后,如何有效去除非道路信息并保持道路信息非常重要。由于存在异物同谱的现象,许多建筑物的光谱特征与道路类似,道路分割时也被提取了出来。非道路点会影响道路的后续检测过程,对道路提取来说是一种噪声,必须去除掉。
道路点与非道路点最大的区别在于道路点在道路方向上有较大长度相连的道路点,而非道路点在任何一个方向上都不可能符合这个条件。根据这一特征可以用线段匹配的方法来判断是否为道路点。
(1)直线段匹配方法
设定一个直线段的长度L,对于每个像素点(道路分割出来的点),在[0,2π]范围内任一个方向上,计算以该点为中心、长度为L的直线段上道路点的个数,就相当于长度为L的直线段以该点为中心旋转,如果在任何一个方向上道路点个数大于阈值M则是道路点,否则作为非道路点去除。判断式如下
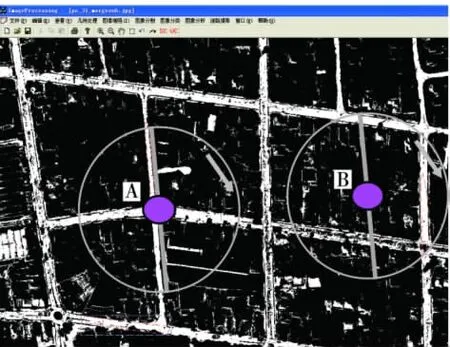
图2 直线段匹配原理
上式中MaxSum为任一个方向上统计量的最大值,M为一个设定的阈值,根据线段长度L而定,一般设为(L-2)。其原理如图2,点A符合道路点的条件保留,点B则不满足道路点的条件被去除。
(2)算法实现
根据上述原理,直线段匹配算法实现步骤如下:
①给定一个直线段长度L、阈值M、MaxSum与初始角度θ。
②对某个像素点计算过该点的角度为θ的直线参数a,b。
③计算直线段上的点坐标(Xi,Yi)。
④判断像素点(Xi,Yi)是否为道路点,是则Sum加1。
⑤重复步骤3、4,直到所有直线段上的点计算完毕,如果Sum大于MaxSum,则MaxSum等于Sum。
⑥改变θ角度,重复 2、3、4、5,直到角度2π。
⑦比较MaxSum与M,如果MaxSum大于M则保留该点,否则去除。
2.3 Hough变换检测道路
经过直线段匹配去噪后仍会有非道路信息存在,为进一步提高道路检测精确性,引入Hough变换检测直线的方法来检测道路。
(1)Hough变换原理
Hough变换于1962年由Paul Hough提出,并在美国作为专利被发表。它所实现的是一种从图像空间到参数空间的映射关系。直角坐标X-Y中的一点(x,y),经过点-正弦曲线对偶变换

在极坐标θ-ρ中变为一条正弦曲线,θ取(0-180°)。可以证明,直角坐标X-Y中直线上的点经过Hough变换后,它们的正弦曲线在极坐标θ-ρ有一个公共交点。也就是说,极坐标θ-ρ上的一点(θ,ρ),对应于直角坐标X-Y中的一条直线,而且它们是一一对应的。
为了检测出直角坐标X-Y中由点所构成的直线,可以将极坐标θ-ρ量化成许多小格。根据直角坐标中每个点的坐标(x,y),在θ=0-180°内以小格的步长计算各个ρ值,所得值落在某个小格内,便使该小格的累加记数器加1。当直角坐标中全部的点都变换后,对小格进行检验,计数值最大的小格,其(θ,ρ)值对应于直角坐标中所求直线。
(2)Hough变换检测道路算法实现
Hough变换检测道路算法步骤为:
①在θ-ρ合适的最大、最小值之间建立一个离散的参数空间,并建立一个累加矩阵J(θ,ρ),每个元素值为0。
②对每个图像像素点计算每个θi对应的ρi,并使J(θi,ρi)值加 1,计算完所有的图像像素点。
③在矩阵J中寻找最大值,记录最大值对应的(θi,ρi),(θi,ρi)即对应一条道路上的直线。
④设定一阈值N,保持θi不变,在ρi上下寻找符合条件 J(θi,ρi)- J(θi,ρ)> N 的宽度 K,K 即为(θi,ρi)对应道路的宽度,将宽度K内的J(θ,ρ)都置为0。
⑤重复步骤③,直到矩阵J中的最大值小于一个给定的MAX值。
一组对应的数(θi,ρi,Ki)即为一条道路的特征值,分别表示道路的角度,截距和宽度,根据这些特征值就可以在图像中描述道路。
3 实验结果及分析
实验数据为GeoEye-1卫星影像。GeoEye-1卫星是由美国GeoEye公司于2008年9月发射的一颗迄今技术最先进、分辨率最高的商业对地成像卫星。该卫星能提供全色0.41 m分辨率和多谱段1.65 m分辨率的超高分辨率影像。为有效区分道路和植被,在试验中用红外波段代替红波段组成假彩色影像。为了综合运用道路的光谱特征与形态特征,将全色影像与假彩色影像进行融合,影像融合时利用ERDAS软件的HIS融合模块,获得高空间分辨率的假彩色影像,大小为1 200×866,如图3。

图3 实验影像
程序实现交互式道路信息采集方法,其界面如图4。可以用多边形进行道路信息的采集,采集完成后加入采集器,每条记录代表一种光谱特征的道路,可以实时根据道路情况增加、删除、融合道路样本区域,能够兼顾各种光谱特征的道路。
根据信息采集结果进行道路分割并二值化效果如图5。
根据直线段匹配原理,编程实现后效果如图6。由图6可以看出,大部分非道路点已经被去除了,而道路点基本没有损失,证明直线段匹配去噪的效果良好。但仍然存在一些较长的非道路信息没有被去除,如图6中所示,这是因为它具有与道路相同的直线段特征。
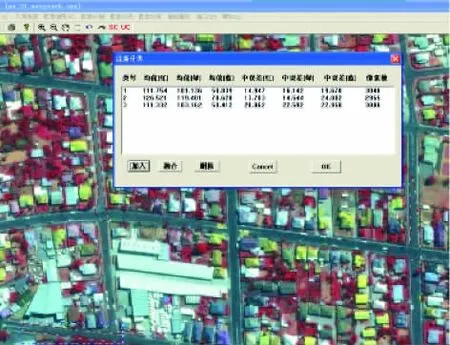
图4 道路信息交互采集
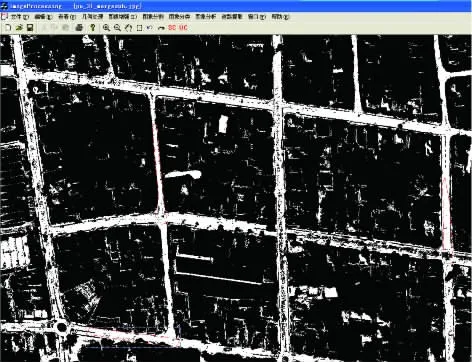
图5 道路分割二值化影像

图6 直线段匹配去噪效果
在上述操作基础上,进行Hough变换检测道路。经Hough变换检测道路后的效果如图7所示。
从图7中可以看出,经过上述几个步骤,Hough变换已经从高分辨率遥感影像上成功检测出了道路网,非道路信息已经完全去除。虽然还存在有些地方断开或缺失的情况,但根据文献[9]给出的准确度的定义“准确度 =正确提取的道路长度/道路的总长 ×100%”,计算得到道路提取的准确度为92.4%。
4 结束语
基于Hough变换的方法检测提取高分辨率遥感影像上的道路,会受到分割效果和非道路因素的影响。针对这两个不足,首先利用交互式道路光谱信息采集方法对影像进行分割并二值化,提高了分割效果;然后采用直线段匹配的方法对非道路信息进行去噪处理,减少非道路因素的影响;最后用Hough变换的方法检测提取道路。试验结果表明,该方法能够较好地提取高分辨率遥感影像上的道路网。该方法的不足之处为:一是对弯曲道路提取效果不理想;二是由于非道路因素如行道树的影响,所提取出的道路存在缺失或断开的现象,需要进一步进行修剪、连接等形态学处理。
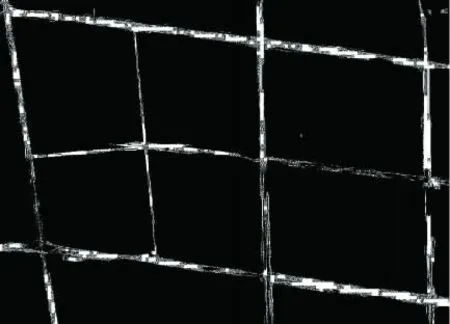
图7 Hough变换检测道路效果图
[1]谢凤英,姜志国,秦世引.对偶空间上的高分辨率遥感影道路提取[J].宇航学报,2006,27(5):1034-1038
[2]吕健刚,韦春桃.基于Hough变换的高分辨率遥感影像城市直线道路提取[J].遥感应用,2009(3):15-18
[3]夏春林,张静,褚廷有.基于高分辨率的城区遥感影像道路半自动提取方法研究[J].测绘科学,2008,33(5):140-143
[4]谢谦礼,程承旗,马 廷.一种基于高分辨率遥感影像的道路提取方法[J].计算机工程与应用,2006,17:188-191
[5]郑 毅,武法东.一种应用于高分辨率遥感影像中道路提取的高效方法[J].安徽农业科学,2010,38(10):5053-5056
[6]陈 杰,杨敏华,等.基于LBP算子与多尺度分析的高分辨率遥感影像道路自动提取方法改进研究[J].遥感信息,2010(2):3-7
[7]沈占锋,骆剑承,郜丽静.不同尺度下高分辨率遥感影像道路信息提取[J].四川师范大学学报,2009,32(6):812-815
[8]周绍光,黎瑾慧.高分辨率遥感影像中提取复杂道路的新方法[J].计算机工程与应用,2008,44(35):190-193
[9]Shi Wen zhong,Zhu Chang qing.The Line Segment Match for Extracting Road Network from High resolutio Satellite Images[J].IEEE Transaction on Geoscience an Remote Sensing,2002,40(2):511-514
[10]Mena JB.Automatic vectorization of segmented road networks by geometric d topological allalysis of high resolution bimry images[J].Knowledge-Based Sys,2006(19):704-718
[11]Dal Poz P,Zanin R B,Vale GM.Automated extraction of road network from medium and high-resolution images[J].Pattern Recognition and Image Analysis,2006,16(2):239-248
[12]Geraud T,Mouret.Fast road network extnction in satellite images using mathematical morphology and markov random Fields[J].EuRASIP Journal on Applied Signal Processing,2004(16):2503-2514
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
空间科学学报(2021年1期)2021-05-22
天津医科大学学报(2021年1期)2021-01-26
雷达学报(2020年3期)2020-07-13
自动化学报(2017年5期)2017-05-14
中国光学(2015年5期)2015-12-09
太空探索(2015年8期)2015-07-18
浙江理工大学学报(自然科学版)(2015年7期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01
