GPS/DR/MM车辆组合导航定位系统研究
2011-11-22 06:43雷达定李学等李端元文方青
湖北汽车工业学院学报 2011年3期
雷达定,李学等,李端元,文方青
(湖北汽车工业学院 电气与信息工程学院,湖北 十堰442002)
0 引言
随着国民经济的高速发展和城市化进程的加快,我国机动车拥有量及道路交通量急剧增加,尤其是大中城市,交通拥挤阻塞以及由此导致的交通事故的增加是我国城市面临的极其严重的“城市病”之一[1]。以湖北省十堰市为例,全市2010年年末机动车拥有辆40.2万辆;而在2000年年末,该市城区机动车总量还不足4万辆。加之山区城市道路拓宽空间受限,疏通城区道路显得更加艰难。机动车快速增长与相对滞后的道路规划建设之间的矛盾日益突显。
智能交通系统 (Intelligent Transportation Sys-tem,ITS)是新型汽车信息电子产品的典型代表[2],它是将导航定位技术、信息技术、数据通信技术等先进技术有效地综合运用于城市交通,从而建立一种全方位的,实时、准确、高效的运输综合管理系统[3]。
本文提出的基于嵌入式系统的GPS (GlobalPositionSystem)/DR(DeadReckoning)/MM(MapMatching)车辆组合导航定位系统是ITS的重要组成部分,而对于整个组合导航定位系统而言,车辆的导航与定位又是其最重要的部分。因此,本文主要针对车辆的导航定位展开了研究。最后通过跑车试验表明,本文设计的组合导航定位系统定位置信度较高,定位精度误差不超过5 m,并且实现了在上位机的导航地图上实时显示车辆当前位置及其他状态信息功能,在智能交通系统(ITS)领域的应用上具有较高的参考价值。
1 系统总体方案设计
1.1 各种车辆组合导航定位系统方案分析
车辆导航定位系统主要为用户终端 (车辆)提供实时位置、速度以及与行驶状态有关的信息。综合多方面文献报导[2-4]可以看出,目前车辆组合导航定位系统主要有如下几种方案:1)GPS/MM;2)GPS/DR;3)GPS/DR/MM组合。第1种方案的优点是系统简单,只需GPS接收机和电子地图,且成本较低,但存在当GPS信号丢失时系统无法工作的致命弱点,系统的可靠性较低;对于GPS/DR组合方案,当卫星信号丢失GPS无法定位时,航位推算系统可继续工作,系统的可靠性得到提高,但是当车辆行驶在道路密集的交通网时,无法利用电子地图匹配技术对GPS定位信息和航位推算系统的定位信息作进一步校正;第3种方案克服了上述2种方案的缺点,是最理想的组合方案。
1.2 GPS/DR/MM车辆组合导航定位系统设计
本文设计的基于嵌入式系统的GPS/DR/MM车辆组合导航定位系统是利用GPS定位、航位推算(DR)定位及地图匹配(MM)三者之间的信息综合和相互校正来提高车辆定位置信度和定位精确度。它主要由车载终端系统、道路监控系统两大子系统构成。应用Microsoft Office Visio 2007软件绘制系统总体设计框图如图1所示。
车载终端系统将车载陀螺仪、里程计等采集的数据通过航位推算得到DR定位数据,然后通过扩展Kalman滤波算法对其和车载GPS接收机接收到的GPS定位数据进行融合处理,应用地图匹配技术,并结合路标定位信息,为车辆提供可靠、准确的位置信息。最后,将这些位置信息通过GPRS网络传送到道路监控系统的道路监控中心,再通过GPRS网络传输控制指令,实现对远程车辆的监控,同时在上位机的导航地图上实时显示出车辆的状态信息。

2 车辆导航定位技术研究
GPS导航定位系统是一种全天候、以无线电通信为基础的卫星导航系统,其基本原理是延时测距[2]。目前,GPS民用动态定位精度可达到15 m左右,这一定位精度已经能满足一般用户的定位要求。但是在城市高楼区、林荫道、立交桥、隧道等特殊地段,GPS信号常常被遮挡而无法被用户接收机接收到,使得定位精度大大降低[3]。为满足车辆对导航定位系统可靠性和精确度的要求,可以通过GPS/DR/MM组合的方法来补偿GPS定位的缺陷。
2.1 GPS/DR多传感器信息融合技术
在组合导航定位系统中采用多传感器信息融合技术可以扩展整个系统的时间和空间覆盖率,增加系统的信息利用率,提高融合数据的置信度和精确度,增强系统的可靠性和容错性。本文采用了适于非线性系统的扩展Kalman滤波算法对来自GPS和DR的定位数据进行融合处理。Kalman滤波器的结构图如图2所示。

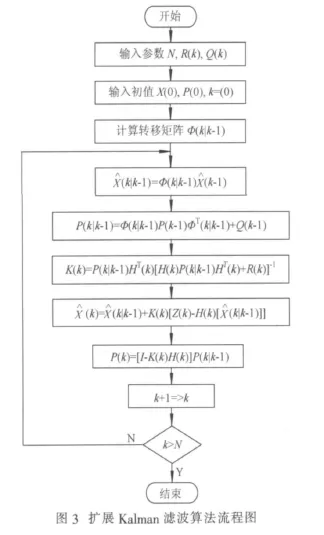
根据GPS/DR组合导航定位系统的Kalman滤波方程组[5],可以得到组合系统的扩展Kalman滤波算法流程图如图3所示。
2.2 地图匹配技术
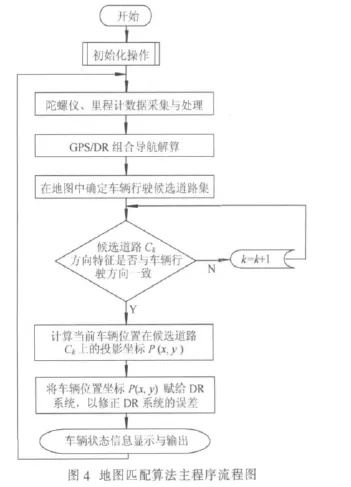
当车辆行驶在道路密集的交通网时,可利用电子地图匹配(MM)技术对GPS定位信息和航位推算系统的定位信息作进一步校正。地图匹配[3]的基本方法是通过将车辆的行驶轨迹与导航地图上矢量化道路的相关特征信息进行匹配,以寻找当前行驶的道路,并将车辆当前的位置投影到相应的道路上。利用陀螺仪敏感的航向变化与导航地图中一定区域内道路特征进行相关性比较,当测量出的车辆航向的显著变化与导航地图的矢量路线变化相关,那么就可以确定车辆在地图中的行驶道路。具体算法实现过程的主程序流程图如图4所示。
为了能直观地显示车辆的相关信息,通过地图匹配相关算法,应用MapX控件[6]设计了道路监控子系统。通过该系统,能精确地在上位机的导航地图上实时显示出车辆当前的各种状态信息,并实现道路监控功能。
3 嵌入式组合导航定位系统设计
3.1 硬件设计
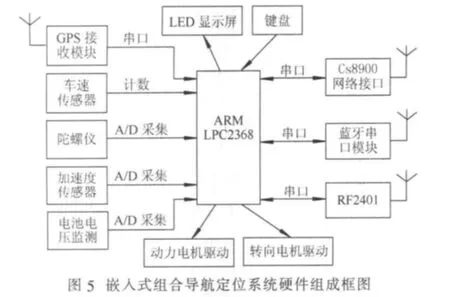
嵌入式组合导航定位系统硬件部分是以ARM7TDMI-S内核的32位微控制器LPC2368为核心,加上 u-blox公司(瑞士)LEA-5的 GPS模块、飞思卡尔公司MMA7260的加速度传感器、InvenSense公司的陀螺仪和MC33886驱动与控制电路等组成。其硬件组成框图如图5所示。
3.2 软件设计
嵌入式组合导航定位系统软件部分的各模块任务通过 μC/OS-II嵌入式操作系统[7-8]统一调用,使各个模块协调工作。根据前面介绍的的GPS/DR多传感器信息融合算法、地图匹配相关算法和系统方案总体设计思想,软件分为数据采集与读取、数据决策与融合、地图更新与显示、GPRS无线通信、车辆行驶控制等模块。其软件结构框图见图6。

具体实现过程:首先,GPS接收机采集到的定位信息通过串口1送入微处理器,GPS串口中断接收到正确的GPS数据后,通过邮箱触发GPS数据读取任务,GPS数据读取任务对数据解包并放入缓存,然后写事件标志组。在1s定时中断后,触发里程计、陀螺仪等DR定位数据采集任务,采集车辆当前的状态数据,存入缓存,然后分别写事件标志组。数据决策对GPS定位进行判断,当GPS定位卫星多于4颗时,微处理器通过2.1节中所述的扩展Kalman滤波算法对GPS和DR定位数据进行数据融合,确定车辆当前位置;当GPS进入信号盲区时,微处理器将GPS失效前一时刻的位置作为初始参数,通过航位推算来维持正常的导航定位。当检测到车辆行驶在道路密集交通网时,微处理器通过地图匹配相关算法并结合路标定位信息,完成对地图数据库的实时更新和车辆位置的实时显示。无线通信模块将得到的定位信息通过GPRS定时发送给道路监控系统。道路监控中心定时接收GPRS网络发送过来的控制信号,触发车辆行驶控制任务,控制车辆的动力电机和转向电机做出响应,实现对运程车辆行驶的实时控制。
4 实验测试及结果分析
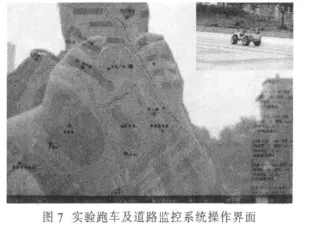
车辆的导航定位能力是衡量一种车辆导航定位系统优劣的核心指标。为了测试系统的定位置信度和定位精确度,在以湖北汽车工业学院为中心的各类交通网(包括高楼区、林荫道等特殊地段)进行了跑车实验。实验跑车及上位机道路监控系统操作界面如图7所示。
4.1 系统定位置信度测试数据与结果分析
国家某控制点公布的十堰市某定点经纬度值:E110.739915;N32.650381。为测试系统定位置信度,以控制点经纬度为参考,经系统实测该定点所得经纬度值(这里任意选取了5组测试数据)以及通过Microsoft Excel软件计算其方差值如表1所列。
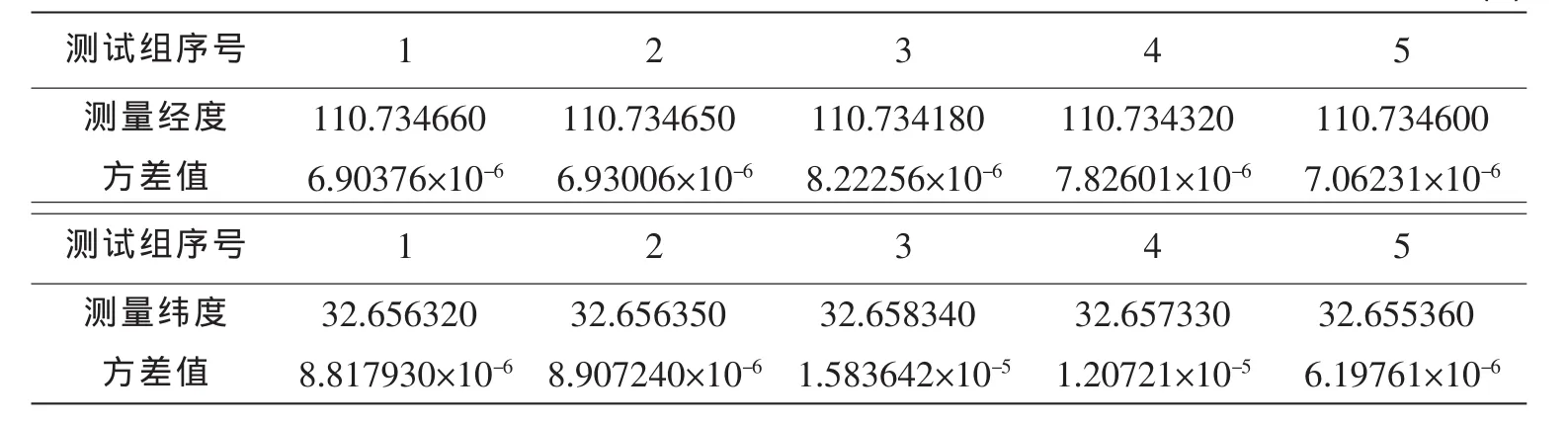
表1 定点测量经纬度值及其方差值 (°)
分析数据表1可以看出,实测数据同公布数据很接近,而且测试数据方差值较小,说明测试数据比较稳定,系统置信度和可靠性较高。
4.2 系统定位精确度测试数据与结果分析
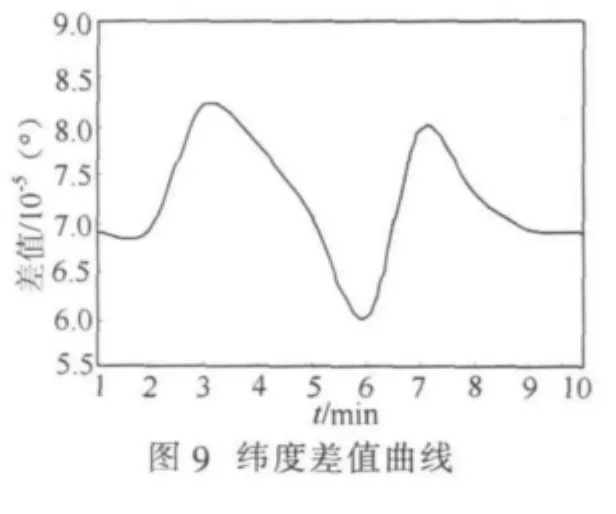
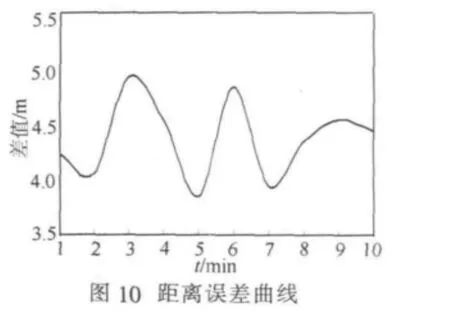
图8~10是应用Microsoft Excel软件绘制的曲线图,是系统计算控制点与GPS接收机接收到的经纬度值点之间的距离同实测距离之间的误差图组。其中的距离误差是根据MapX控件[6]map对象的distance方法计算得到,其公式为

式中:x1,y1—第 1 个点的经纬度值;x2,y2—第 2 个点的经纬度值。
分析图8~9可以看到,系统计算控制点与GPS接收机接收到的经纬度值点之间的距离同实测距离之间的误差不超过5 m,定位数据误差小,系统定位精度较高。

5 结束语
基于嵌入式系统的GPS/DR/MM车辆组合导航定位系统,采用了较为先进的GPS、DR、MM技术,应用扩展Kalman滤波算法对来自GPS和DR的定位数据进行融合处理,对多传感器信息进行最优估计,实现对车辆的准确、可靠定位,并且当车辆行驶在道路密集的交通网时,仍可利用电子地图匹配(MM)技术对GPS定位信息和航位推算系统的定位信息作进一步校正,有效地解决了卫星信号盲区GPS定位间断或失效以及航位推算(DR)定位误差随时间积累等问题。理论研究及实验证明,基于本文所述结构体系建立的车辆组合导航定位系统,其车载终端子系统定位数据稳定可靠,定位误差不超过5 m;道路监控子系统界面友好,操作简易,方便用户使用。结合信息技术、数据通信技术等其他先进技术,并进一步深入研究该组合导航定位技术,再将其应用于我国的智能交通系统,可以提高运输效率,在一定程度上改善我国的交通状况,为社会节约资金和人力,具有积极的社会经济意义。
[1] Feiyue Wang, Shuming Tang, Yagang Sui.Toward intelligent transportation systems for the 2008 Olympics.Intelligent Systems[J].IEEE,2003,18(6):8-11.
[2]田小芳.基于嵌入式系统的GPS/DR/MM组合定位导航系统研究与实现[D].上海:复旦大学,2006.
[3]黄袁斌,孙永荣,沈雪松,陈武.高精度车载导航定位系统的研究[J].交通与计算机,2006,24(6):35-37.
[4]晏春海,夏振纯,王洪生.基于ITS的GPS/DR/MM组合导航技术的应用[J].计算机测量与控制,2004,12(7):664-670.
[5]付梦印,邓志红,闫莉萍.Kalman滤波理论及其在导航系统中的应用[M]2版.北京:科学出版社,2010.
[6]于梦琦,杨宏业,侯国成.组件技术MapX在车辆监控系统中的应用[J].微计算机信息,2008,24(12):258-259.
[7]Jean J.Labrosse. 嵌入式实时操作系统 μC/OS-II[M].2版.北京:北京航空航天大学出版社,2003.
[8]任哲,潘树林,房红征.嵌入式操作系统基础 μC/OS-II和Linux[M].北京:北京航空航天大学出版社,2006.
猜你喜欢
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
核科学与工程(2021年4期)2022-01-12
青年歌声(2020年12期)2020-12-23
计算机应用(2018年5期)2018-07-25
铁道通信信号(2018年2期)2018-04-18
电镀与环保(2016年3期)2017-01-20
轴承(2015年2期)2015-07-25
读写算·高年级(2015年1期)2015-07-25
单片机与嵌入式系统应用(2014年9期)2014-03-11