三维激光扫描技术在特异型建筑构件检测中的应用探讨
2011-11-15 03:30周克勤吴志群
测绘通报 2011年8期
周克勤,吴志群
(北京建筑工程学院建方科技公司,北京100044)
三维激光扫描技术在特异型建筑构件检测中的应用探讨
周克勤,吴志群
(北京建筑工程学院建方科技公司,北京100044)
以两个工程案例为依据,探讨三维激光扫描技术在特异型建筑构件检测中的应用,着重叙述其具体实现的技术路线和优势。
三维激光扫描;特异型建筑构件;检测
一、三维激光扫描技术
近年来,随着我国综合国力的增强和经济的快速发展,越来越多的重大工程(如奥运工程、高速铁路、航天工程、地铁工程等)在发展国家经济、提高人民生活水平、推动现代化建设中发挥着极其重要的作用。这些关系国计民生的特大异型工程体量大、结构复杂、形状怪异,施工难度大、质量要求高、安全责任重。利用传统测量技术和手段解决建筑构件检测不但劳动强度大、效率低、精度差,且常常不能满足现代施工建设周期的需要,而三维激光扫描技术的异军突起为这些问题提供了新的解决方案。
本文通过两个三维形状重构工程案例来探讨三维扫描技术在特异型建筑构件检验与测绘中的应用。
二、应用工程
工程所采用三维扫描设备为徕卡Scanstation2三维激光扫描仪,基本参数如下:① 测量精度为单点4 mm,模型1 mm;②测距范围为300 m@90%反射率;③扫描视场为360°×270°;④数据采样率为50 000点/s。
1.鸟巢奥运火炬数据采集
鸟巢是一个大跨度的曲线结构,有大量的曲线箱形结构,设计和安装均有很大挑战性,而鸟巢圣火台燃气管道是根据鸟巢结构,从鸟巢底部沿一根钢架蜿蜒而上,切线距钢架边缘15 cm。由于管道采用直径300 mm的钢管6 m一段无缝焊接而成,因而精确获取此切线数据关乎重大。鸟巢钢结构的钢架表面为光滑的不规则曲面,传统的数据获取手段均为离散点定位,要想获取这样一条连续的不规则曲线,工程量之巨不可想象,且精度难以保证。而三维扫描技术则可以提供一条快捷、可行的技术路线:首先精确得到目标钢架的点云数据,拟合出Nubers曲面模型;然后将钢架右侧曲面模型沿钢架表面向左侧平移15 cm,与钢架上表面相交,提取出交线即为所需曲线,分段采样得到采样坐标数据,其流程图如图1所示。
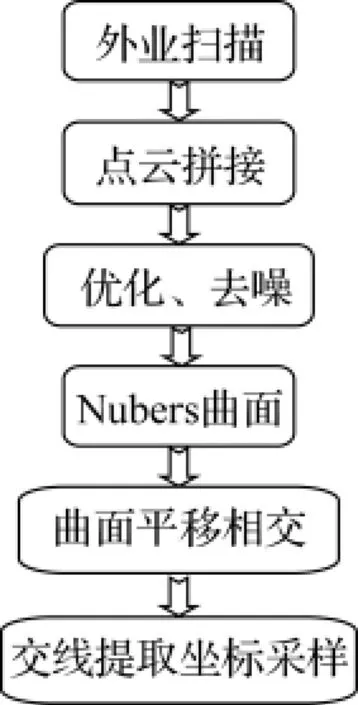
图1
(1)外业扫描
在外业扫描过程中,基本遵循如下原则:
1)不同的扫描段之间保持30%的重叠度,不同扫描块在边界连接处应进行完全重叠扫描以便点云模型连接。
2)每一个观测角度扫描数据尽量获取完整的表面数据。
3)遇到特征复杂或遮挡严重的地方,扫描行间距要适当加密,以保证获取完整的数据。
目标钢架高约42 m,其外2 m处部分有施工防护网遮挡,为保证点云的完整性,从垂直方向3个不同的高度,平面位置9个不同的角度对其进行扫描,多站重叠基本覆盖了所有表面,原始点云如图2所示。
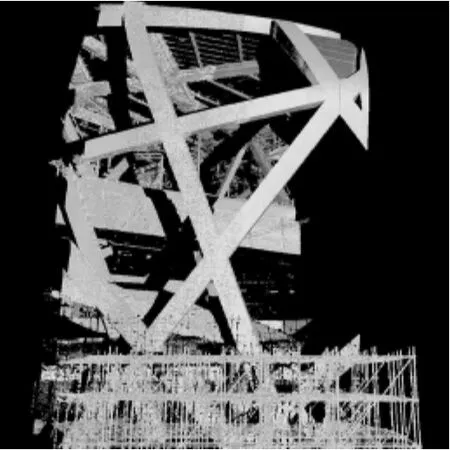
图2
同时,为了保证点云数据的精确性,在两站点云的拼接时,标靶的拼接精度控制在±2 mm以下,点云的精度控制在±2 mm。
(2)钢架表面数据Nubers曲面建模
曲面建模是指通过生成曲面模型将离散的测量数据(这里指点云数据)重构出连续变化的曲面。采用Nubers曲面建模能够精确表示常用的平面和二次曲面等。Nubers曲面对于标准曲面和任意形状曲面具有统一的数学形式。
一张p·q次Nubers曲面的有理多项式矢函数定义为

其中,di,j(i=0,1,…,m;j=0,1,…,n)为控制顶点,呈拓扑矩形阵列,形成一个控制网络;wi,j是与顶点di,j联系的权值;Ni,p(u)和Nj,q(v)分别为参数u方向 p次和参数v方向q次的规范B样条基函数。
由曲面方程可知,通过调整控制顶点和权值,可以灵活改变曲面形状。要对曲面进行局部调整,只需调整个别控制顶点。由于Nubers曲面良好的数学性质和优秀的几何特性,它可以方便地按不同要求表示曲面以及实体造型中的体素,所以这种曲面可以方便、精确地构建各类工程中的三维实体模型。通过专业逆向工程软件,得到钢架Nubers曲面模型如图3所示。
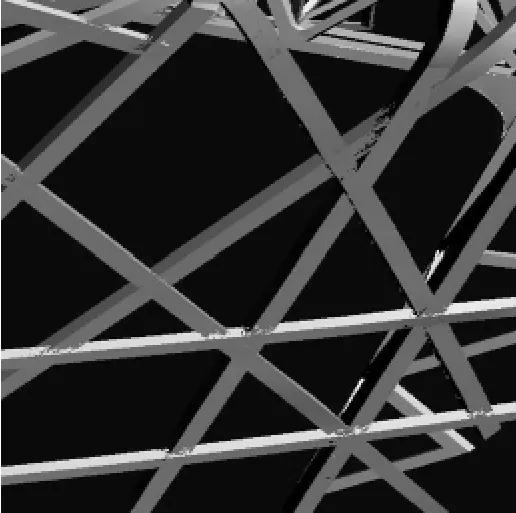
图3
(3)曲线数据获取
将已知目标钢架右侧表面的Nubers曲面沿外表面相切方向平移15 cm,与外表面曲面相交,得到项目所需的曲线,其过程如图4所示。
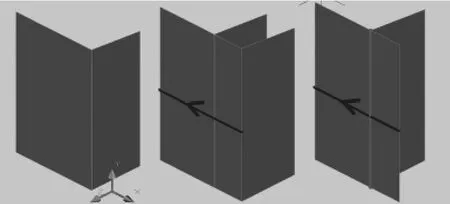
图4
最后,在所得曲线上进行坐标采样,得到管道设计所需离散点采样坐标,如图5所示。
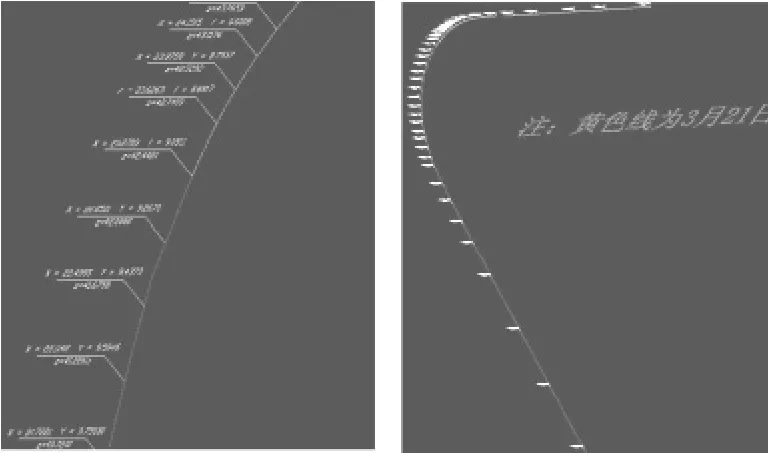
图5
2.某大型钢结构建筑主、次梁出厂检测
某大型钢结构建筑主要构件为主、次梁,其截面如图6所示,安装结构复杂,如图7所示。为保证钢结构的顺利和精确安装,必须对主、次梁构建的生产精度进行检测,也就是与设计数据进行比对,利用传统测绘手段显然比较困难,基于三维激光扫描的模型重构技术为其提供了解决方案。
(1)主、次结构的点云处理
数据的采集和配准仍按上文所述进行,得到主结构梁的梯形端口点云数据,拟合出端口平面并提取出其交线,进而得到边界线和交点,将这些特征点提取出来并分别返回到点云。得到扫描点云中的特征点数据之后,需要把这些数据与设计特征点数据进行匹配对比,处理方法是将设计标志点三维坐标数据导入到点云处理软件中,作为虚拟标靶点,与实际点云拟合的标志点数据进行拼接匹配,其过程如图8所示。

图6

图7
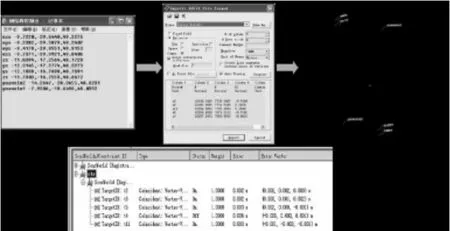
图8 特征点匹配
图8中,各项处理数据的指标:①平面拟合精度为±2 mm;②直线拟合精度为±2 mm;③数据配准精度为±3 mm。
(2)构建TIN模型与设计CAD模型比对
经过上一节中的特征点匹配,实现了将扫描点云数据与设计数据统一在相同坐标系之中,然后即可建立三角网模型与设计值进行比对。
三角网模型是精确表达空间不规则体的最佳模型,是一种精确的表面模型,通过成型的三角网可以方便地构建曲面模型、进行数据编辑、物体表面对比分析和相关的空间量测等。
三角网构建需要注意几点:
1)去除不相干的表面数据,如边缘的杂物。
2)构网步长以重采样点间距为准,边界区域根据构网跨度定位极限边长。
经过三角网优化,将实际采样的主、次结构点云三角网与设计值叠加,并通过提取断面的方式与设计断面进行比对,可以得到不同断面的加工与设计误差,其过程如图9所示。
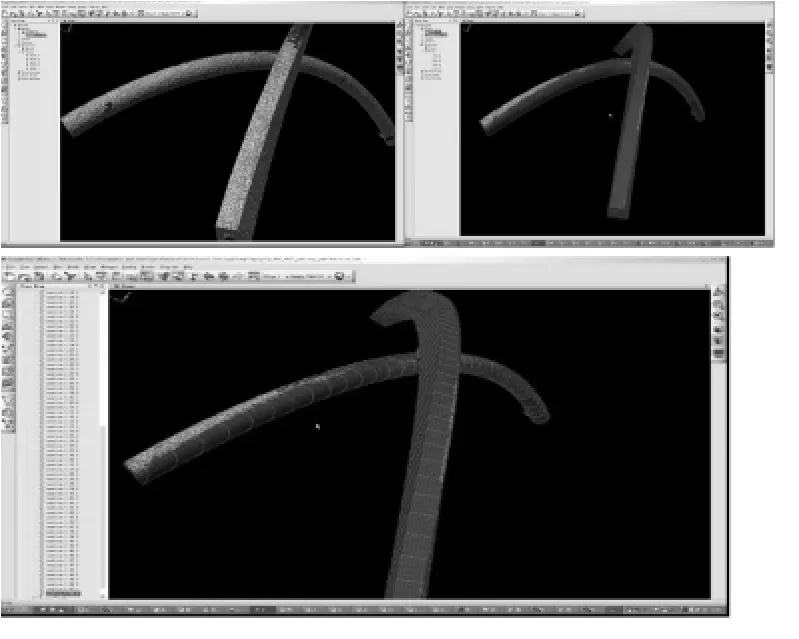
图9 提取断面过程
经过坐标比对,可以得到特征点加工值与设计值的坐标偏差,并绘制变形曲线图。
(3)三维分析
二维模式下的数据对比显然不够直观,三维激光扫描技术最优势的地方在于其可进行三维数据分析。将设计模型和扫描所得三角网模型导入三维分析软件中,即可对两者进行数据分析,得到最大最小偏差、平均差值等,十分快捷直观,比对结果如图10所示。
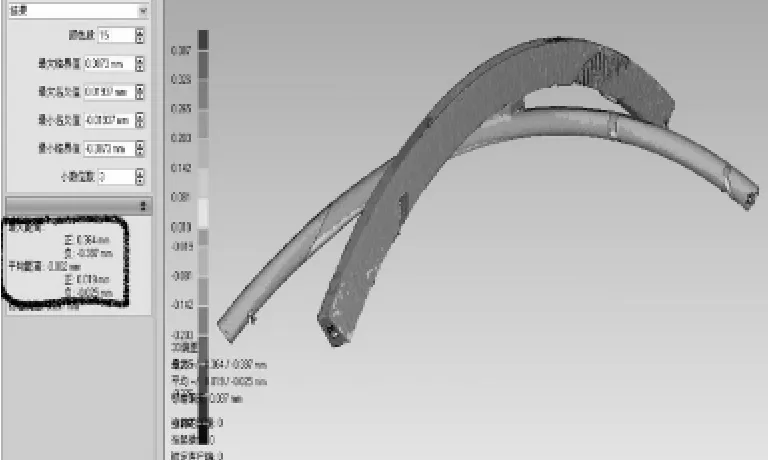
图10 三维分析
三、结束语
本文所述两个工程案例:第1个是通过特征提取的方法获取所需数据;第2个是通过坐标改化的方法,将已有逆向数据与正向设计数据进行对比分析,得到误差和变形数据,具有较强的代表性,是三维扫描模型重构技术的典型应用案例。三维激光扫描技术有着鲜明的特点和传统测绘技术无法比拟的优越性,对三维激光扫描技术进行深入研究,将为特大异型工程建设提供强有力的测绘保障。
[1] 郑德华,沈云中,刘春.三维激光扫描仪及其测量误差影响因素分析[J].测绘工程,2005,14(2):32-34.
[2] 冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002.
[3] 周克勤,吴志群,王维存.地面三维激光扫描技术在古建保护与修复中的应用探讨[C]∥苏州世界遗产保护论坛会议论文集.苏州:[s.n.],2005.
Discussion of the Application of Three-dimensional Laser Scanning Technology to Detect the Specific Type of Building Elements
ZHOU Keqin,WU Zhiqun
0494-0911(2011)08-0042-03
P234.5
B
2011-01-21
周克勤(1962—),男,安徽宿县人,副教授,主要从事摄影测量与遥感等教学、科研与生产技术管理方面的工作。
猜你喜欢
中国学校体育(2021年7期)2021-11-27
冰雪运动(2020年2期)2020-08-24
中华建设(2019年7期)2019-08-27
数学年刊A辑(中文版)(2019年1期)2019-01-31
数学物理学报(2018年5期)2018-11-16
智能计算机与应用(2017年2期)2017-05-04
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01
浙江大学学报(工学版)(2016年10期)2016-06-05
长江工程职业技术学院学报(2014年4期)2014-11-30
华东师范大学学报(自然科学版)(2014年1期)2014-04-16