基于UCD/UCX航摄影像的像控点布设方案研究
2011-11-15 03:30李春华刘国祥
测绘通报 2011年8期
邓 芳,张 俊,刘 怡,李春华,刘国祥
(1.成都市勘察测绘研究院,四川成都610081;2.西南交通大学土木工程学院,四川成都610031)
基于UCD/UCX航摄影像的像控点布设方案研究
邓 芳1,张 俊1,刘 怡2,李春华1,刘国祥2
(1.成都市勘察测绘研究院,四川成都610081;2.西南交通大学土木工程学院,四川成都610031)
为寻求像片控制点合理的布设方案,采用某地区的UCD/UCX航摄影像作为试验数据,通过对区域网按均匀分布原则设置不同的平高控制点数,进行系列的空中三角测量试验研究及精度评定,最后提出几种在保证特定精度情况下,能减少外业工作量、降低生产成本、缩短生产周期的像片控制点布设方案。
UCD/UCX;像片控制点;精度;空中三角测量
一、引 言
进入21世纪以后,我国数字摄影测量以惊人的速度发展,DWP(处理对象为扫描形成的数字化影像)盛行至今已18年。2000年荷兰阿姆斯特丹国际摄影测量与遥感大会上数码航空相机开始出现[1]。目前国际上数字航摄仪产品主要有以下几种:瑞士徕卡公司的ADS40,美国Z/I公司的DMC,奥地利的UCD/UCX,以及我国刘先林院士研制的SWDC系列数字航空摄影仪。
大幅面航空数码相机影像较常规相机胶片影像更清晰,且无需扫描可直接获取数字化影像,因此它在摄影测量的生产实践中受到极大的关注[1]。然而航空数码相机的摄影比例尺小于常规航空相机,使得其影像覆盖范围缩小,像对数(模型)增加,工作量加大。同时,由于航空数码相机的交会角较小,还导致其高程量测精度较低,这些缺点都将限制其广泛应用。但如利用计算机视觉的理念冲破传统摄影测量的束缚,以图幅为单位进行立体测图、DEM生成、实现模型接边自动化,或按多目视觉理论,利用多重叠影像增大交会角的方式,都可在一定程度上克服这些缺点[1]。
本文将在以上研究理论的基础上,采用某地区UCD/UCX航摄影像作为试验数据,通过对区域网按均匀分布原则设置不同的平高控制点数,进行系列的空中三角测量试验研究及精度评定。最后提出在保证特定精度情况下,能减少外业工作量、降低生产成本、缩短生产周期的像片控制点布设方案。
二、研究区域
1.摄影参数及研究区域
数字航空摄影仪为UCD/UCX,其镜头由4台黑白影像的全色波段(Pan)相机、4台多光波(MS)相机组成,如图1所示。

图1 UCD/UCX相机镜头示意图
UCD/UCX数码相机为垂直中心投影,其主要性能参数如表1所示。
研究区域航摄资料的其他参数如下:相对航高为2 200 m,航摄比例尺为1∶21 000,南北方向飞行,地面分辨率优于0.2 m。像片总数为102张,航线数为6条,每条航线17张影像,即每条航线16条基线。影像航向重叠大于65%~70%,旁向重叠大于30%。如图2所示,其中“+”号表示像主点。

表1 UCD/UCX数码相机主要性能参数表

图2 研究区域DEM与像主点坐标的叠加图/(°)
2.像控点信息
采用网络RTK测量模式进行像片控制点采集,并利用该地区1'×1'格网似大地水准面模型进行高程转换,平面和高程精度均优于±5 cm,像片控制点共101个。坐标系统为地方独立平面坐标系和1985国家高程基准。由于该研究区域属于平坦区域,像控点的选择仅根据均匀分布的原则,未过多考虑地形因素。
三、试验验证
1.试验方案
本次试验根据光束法区域网整体平差原理,分别利用摄影测量工作站JX-4和Virtuo Zo进行整个试验区域的空三加密计算。
为了更清晰地说明像控点布设方案,首先将航摄区域6条航带的6×17个像主点坐标按规则排列(如图3所示),图中,横坐标值整数x表示第x航带,纵坐标值整数y表示相应航带的第y张航摄影像的像主点坐标,相邻像主点之间的连线为航摄基线。
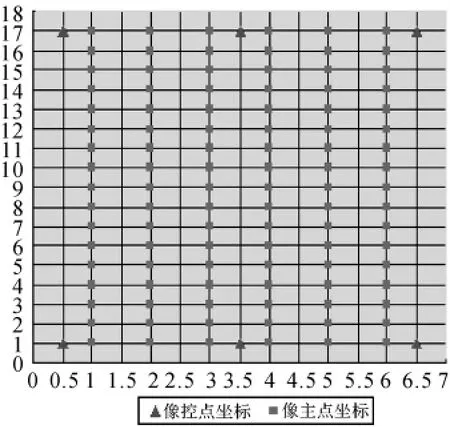
图3 像控点布设方案示意图
以六点法为例,详细说明第一种像控点布设方案。六点法的6个像控点位置大致分别位于(0.5,1)、(0.5,17)、(3.5,1)、(3.5,17)、(6.5,1)、(6.5,17)处。对此处的6个位置可进行如下描述:基线间隔数为16,航带间隔数为3。因此,对像控点布设的9种方案(如图4所示)可进行如下描述:①六点法,基线间隔数为16,航带间隔数为3;②八点法,基线间隔数为16,航带间隔数为2;③ 九点法,基线间隔数为8,航带间隔数为3;④十二点法,基线间隔数为8,航带间隔数为2;⑤ 十五点法,基线间隔数为4,航带间隔数为3;⑥ 二十点法,基线间隔数为4,航带间隔数为2;⑦二十七点法,基线间隔数为2,航带间隔数为3;⑧三十六点法,基线间隔数为2,航带间隔数为2;⑨六十三点法,基线间隔数为2,航带间隔数为1。
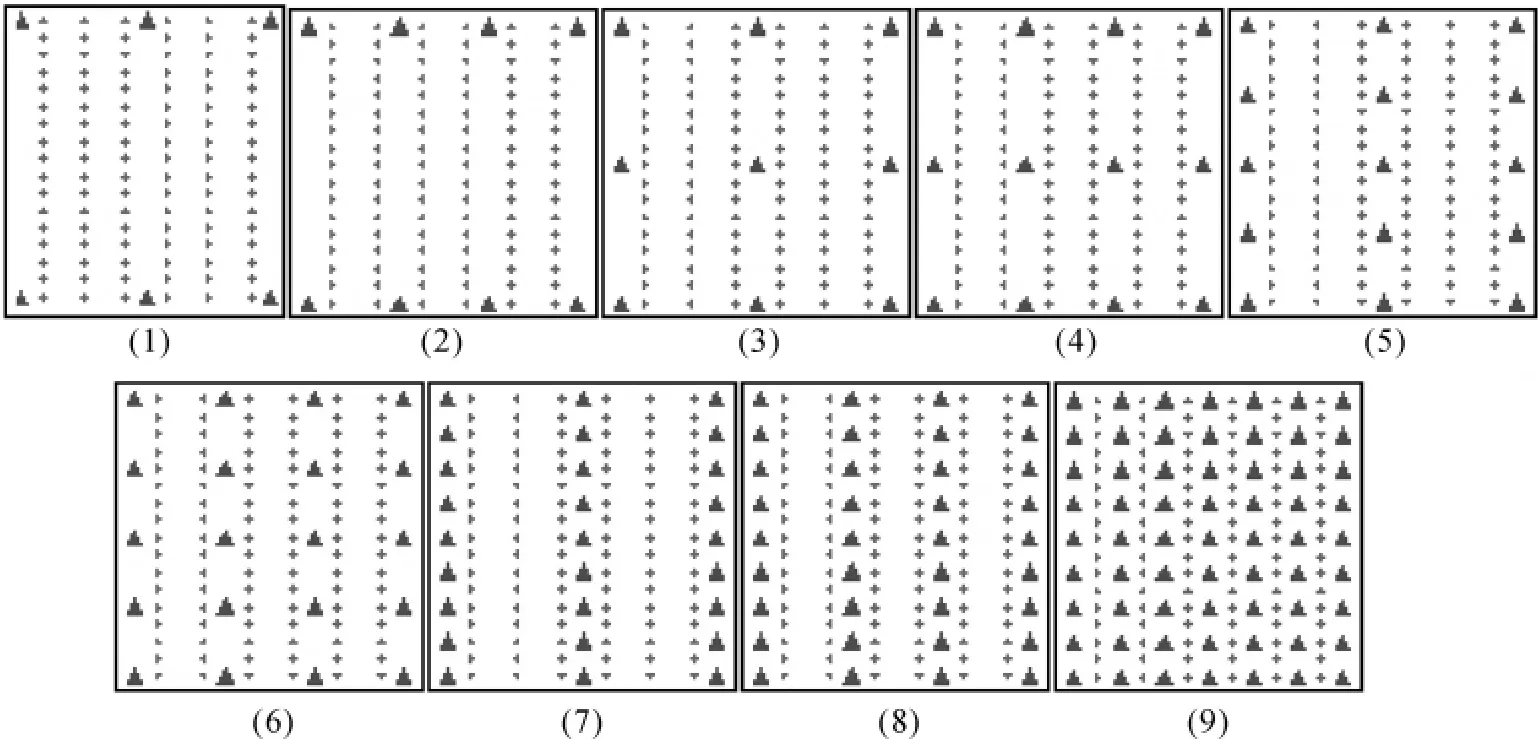
图4 像控点布设的9种方案
2.方案对比
利用摄影测量工作站JX-4和Virtuo Zo分别对整个试验区域进行空三加密计算之后,再按照式(1)计算平面及高程中误差。9种方案的空三加密统计结果如表2所示。
式中,mS为平面中误差;mh为高程中误差;(xi,yi,hi)为第i个检测点加密坐标;(x'i,y'i,h'i)为指第i个点的实测坐标;单位为m。
表2显示JX-4与Virtuo Zo两套软件的平面误差基本一致,中误差约为±0.2 m,即一个像元的精度。其中JX-4试验结果为:平面中误差介于[0.20 m,0.25 m]之间,最大误差介于[0.35 m,0.54 m]之间;高程中误差介于[1.09 m,0.30m]之间,最大误差介于[2.01 m,0.62 m]之间。Virtuo Zo试验结果为:平面中误差介于[0.16 m,0.21 m]之间,最大误差介于[0.40 m,0.49 m]之间;高程中误差介于[2.26 m,0.29 m]之间,最大误差介于[3.47 m,0.63 m]之间。以上平面精度完全达到了《1∶500 1∶1000 1∶2 000地形图航空摄影测量内业规范》《GB/T 7930—2008》中1∶1000地形图空三加密的精度要求。9种方案的平面中误差与高程中误差统计图如图5所示。
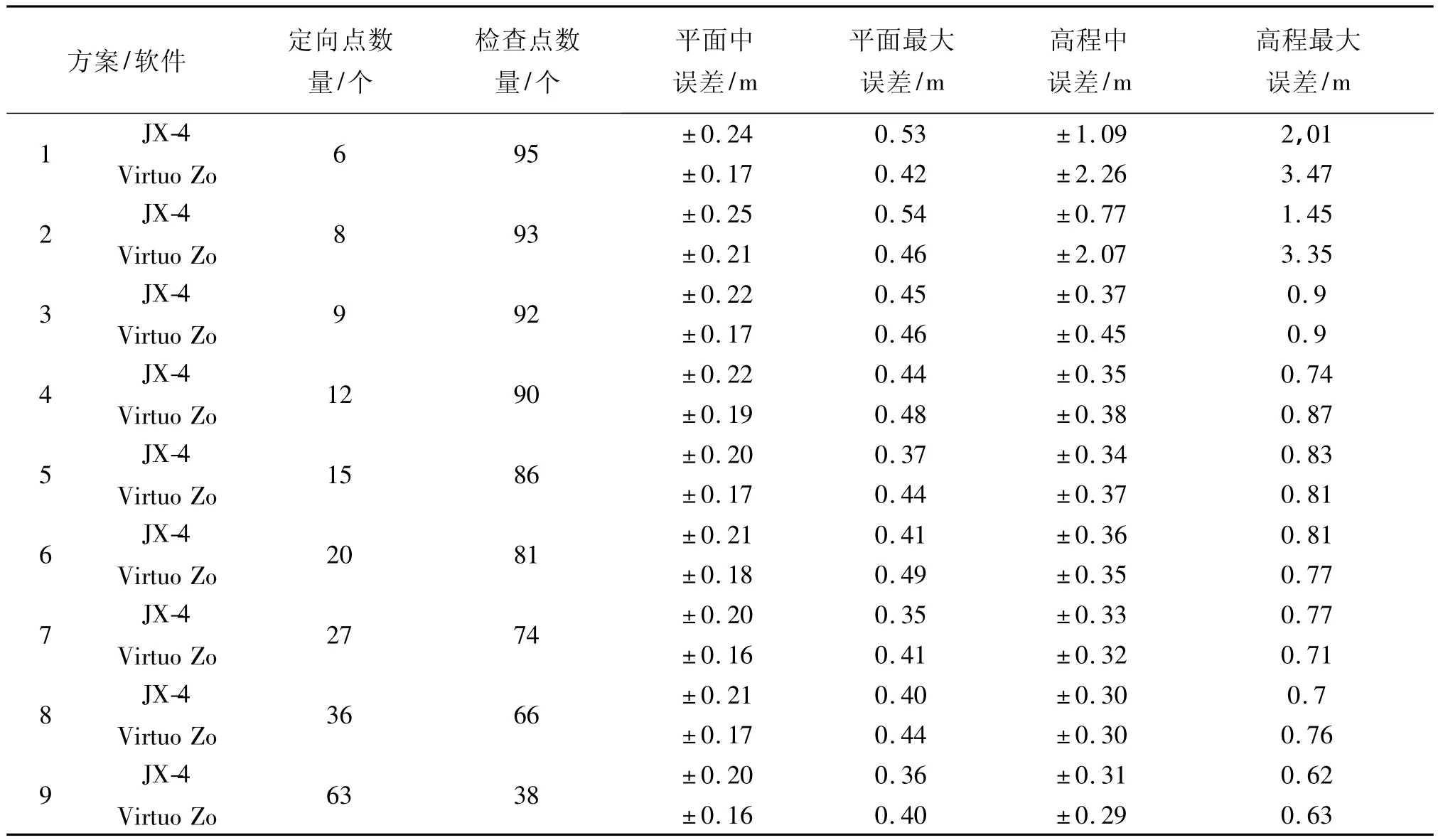
表2 空三加密结果统计表
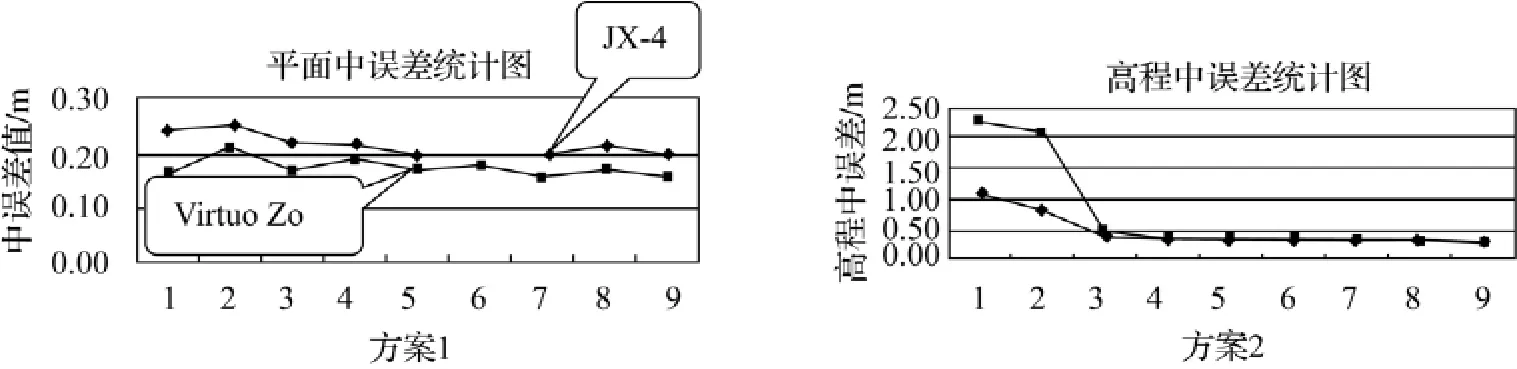
图5 9种方案的平面中误差与高程中误差统计图
如图5所示,方案1和方案2(基线间隔数为16)的高程中误差明显比其余7种方案所计算的高程中误差大,因此,剔除这两种方案。其余7种方案的高程中误差基本一致,如使用JX-4的计算结果介于[0.37 m,0.30 m]之间,利用Virtuo Zo的计算结果介于[0.45 m,0.29 m]之间,高程中误差分布如图6所示。

图6 方案3—方案9高程中误差分布图
如图7所显示,9种方案所需定向点个数的变化趋势为逐次递增。方案1和方案2由于所计算的高程中误差较大,已经被剔除。因此仅考虑其余7种方案随着定向点数目的增加高程加密精度的改进情况。观察图6~图7,可发现随着定向点数量的增加,高程加密精度略有改善,但9个定向点与63个定向点的所计算的高程中误差为同一个数量级,而控制点的数量却增加了4倍,大大增加了外业工作量,延长了生产周期。

图7 定向点数量分布图
为了进一步验证以上部分像控点布设方案的优越性,特选取了研究区域中的3个子区域进行全野外像控点布设,每个模型(一个立体像对)6个定向点,若干检查点,采用独立模型法区域网空中三角测量的方式解算检查点坐标,并进行精度统计,精度统计结果如表3所示。

表3 全野外模型检查点误差统计表
以上数据表明,在全野外像控点布设方案中采用独立模型法区域网空中三角测量,与在试验方案中采用光束法区域网空中三角测量所计算出的平面精度(方案1—方案9)保持在同一数量级,并且大小相近,高程精度(方案3—方案9)也保持在同一数量级,大小也相近(高程精度全野外模型略优)。但全野外像控点布设方案的控制点数量却大大增加,为试验方案3(9点法)的24倍(如采用全野外像控点布设方案,该区域需布设 221个,即17×13个)。
四、结束语
为了减少外业工作量、降低生产成本、缩短生产周期,本文采用某地区的UCD/UCX航摄影像作为试验数据,设计了9种像片控制点布设方案,通过光束法区域网空中三角测量的方法计算出每一种方案的平面及高程测量精度,并与全野外像控点布设方案的结果进行了对比,得出如下结论:①对于该数字航空摄影仪,就平面精度而言,其航摄比例尺与成图比例尺可放宽至20倍,即可以用1∶20 000航摄资料制作1∶1 000数字线划图;②全野外像控点布设方案与试验方案1—方案9的平面精度完全一致,约为1个像元大小(0.2 m)的精度,而高程精度随着控制点数量的成倍增加略有改善,因此,建议采用九点法或十二点法布设像片控制点,既保证了平面精度,又兼顾了高程精度。如只考虑平面精度,可采用六点法的布设模式。
[1] 张祖勋.航空数码相机及其有关问题[J].测绘工程,2004,13(4):1-5.
[2] 戴腾,张勇,杨华先,等.UCD数码相机影像在武汉测区的应用[J].地理空间信息,2008,6(3):130-132.
[3] 俞旭升.DMC航摄影像外业像控布点的实验研究[J].测绘科学,2006,31(6):77-79.
[4] 孙粉霞,邹学忠.UCD航摄像片在大比例尺地形图中的应用[J].现代测绘,2009,32(4):47-48.
[5] 郭冬娥,张拥军,刘振军,等,DMC数码航摄区域网控制点布设方案的精度试验[J].山东国土资源,2007,23(10):42-45.
[6] 国家测绘局标准化研究所.GB/T 7930—2008 1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范[S].北京:中国标准出版社,2008.
On Distribution Scheme of Photo Control Points for UCD/UCX Aerial Imagery
DENG Fang,ZHANG Jun,LIU Yi,LI Chunhua,LIU Guoxiang
0494-0911(2011)08-0009-04
P231.4
B
2010-09-02
邓 芳(1978—),女,湖南怀化人,硕士,工程师,主要从事摄影测量与遥感技术应用以及数据加工等方面的研究。
猜你喜欢
数学小灵通(1-2年级)(2020年11期)2020-12-28
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
小学生学习指导(低年级)(2019年3期)2019-04-22
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
舰船电子对抗(2016年5期)2016-12-13
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
读写算·小学低年级(2014年4期)2014-07-24