
某种数字电动舵机的设计
2011-10-20 02:02中国电子科技集团公司第二十七研究所王宏伟
河南科技 2011年8期
中国电子科技集团公司第二十七研究所 王宏伟
某种数字电动舵机的设计
中国电子科技集团公司第二十七研究所 王宏伟

以往的电动舵机多采用有刷电机,但其可靠性低、噪声大且寿命短,降低了系统的可靠性。无刷直流电机以电子换向代替有刷电机的机械换向,克服了有刷电机具有机械换向器可靠性低、寿命短的缺点,而具有无换向火花和无线电干扰、优良的控制特性等优点,提高了系统的可靠性和控制性能。本文,笔者介绍某种数字化电动舵机的工程设计,在设计中采用模糊滑模变结构和三环控制技术,并针对特殊要求设计了双余度和温控功能,提高了系统的控制精度和可靠性。
一、主要功能
无刷直流电动舵机是系统的执行机构,主要功能是接受飞控计算机的控制指令,驱动舵面转动等。要求数字控制接口控制信号传输距离大于100m,具有故障自检、实时上报、故障余度的实时切换等功能。
二、工程设计
1.系统组成。无刷直流电动舵机主要有控制器、无刷电机、减速器和传感器4部分组成。电动舵机组成框图如图1所示。
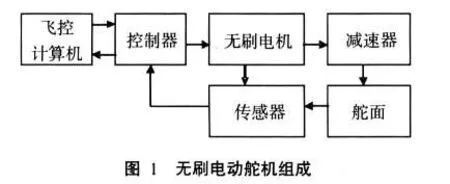
舵机是高度集成的机电一体化设备,在有限的体积内集成了电机、减速器、伺服控制单元、功率驱动模块、电源模块、机械壳体等零部件。因此,其长时间稳定工作时的电磁兼容性和可靠性是工程设计中至关重要的问题。
2.系统设计。电动舵机的控制器是整个舵机系统的核心和大脑,主要由数字信号处理器单元、环路控制单元、逻辑变换及脉冲分配单元、功率驱动单元和模数转换单元等组成,控制器组成框图如图2所示。
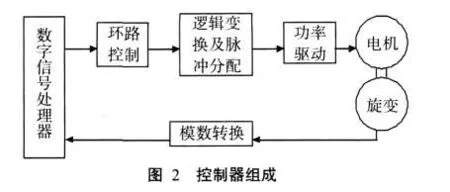
(1)数字信号处理器单元。数字信号处理器由DSP作为主控单元,接收飞控计算机的控制指令,并接收当前传感器信息(舵面位置或阀门的开关状态),计算出误差,经过一定的算法,向环路控制单元发出控制信号,经逻辑变换及脉冲分配单元和功率驱动单元,驱动无刷电机按照要求指令转动。
(2)环路控制单元。环路控制单元为3环,即位置环、速度环和电流环控制模式,环路框图如图3所示。

一是电流环。电流环是最内环,电流环控制执行电机驱动电流,具有电机电流过流保护功能、拓展系统带宽、改善系统抵抗负载力矩扰动等作用。一般为了使电机电流超调较小,电流环通常设计成Ⅰ型系统。电流环的控制对象是双惯性环节,要校正成Ⅰ型系统,调节器设计成PI调节器,调节器零点对消掉控制对象的大时间常数极点。电流环环路框图如图4所示。

式中,Ki为电流调节器比例参数,τi为电流调节器超前时间常数。
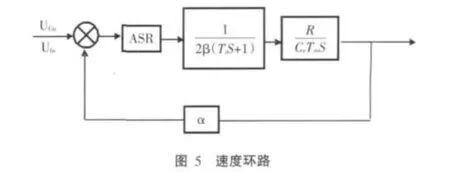
二是速度环。速度环是电流环的外环,位置环的内环,是该系统中比较关键的一环,也是机电有机结合重要控制部分。为了使系统具有速度无静差和较强的抗负载扰动能力,通常速度环应设计成Ⅱ型系统。把设计好的电流环作为速度环的控制对象,并把速度环设计成Ⅱ型系统,速度调节器采用PI调节器。速度环环路框图如图5所示。图中,R为电机电枢电阻,Ce为电机电动势转速比,Tm为机电时间常数。
三是位置环。位置环保证系统按一定精度位置闭环,为了保证系统位置闭环精度,位置环设计成Ⅱ型系统。与Ⅰ型相比,Ⅱ型系统具有抗干扰能力强,速度响应无静差。缺点是超调量大。本系统设计采用模糊-变结构控制技术保证系统动态精度和稳定性。
(3)功率驱动单元。功率驱动单元的性能直接决定伺服系统跟踪性能的优劣和系统的工作可靠性。功率驱动单元功率放大器件选用目前比较先进的智能功率模块IPM,该模块具有输出功率大、响应频率高和具有多种保护功能等优点,最高输出电压可达600V,最大输出电流可达35A。
(4)双余度功能。为了提高整个系统的可靠性,关键部位的电动舵机将采用双余度电动舵机。
双余度电动舵机的余度管理模式有多种类型,其中典型的有并行/主动模式和工作/备份模式。并行/主动模式的余度系统在出现故障以后可以实现工作状态的无缝切换,动态响应及可靠性均优于工作/备份模式,因此,选用并行/主动模式。
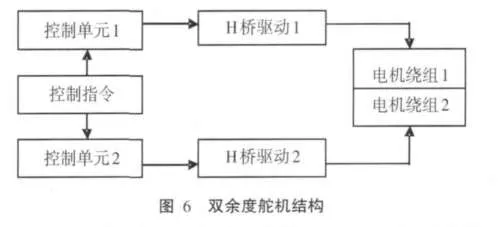
双余度永磁无刷直流电机有串联和并联两种典型结构。并联结构的电机共用一套转子和定子,两套独立的电机电枢绕组隔槽嵌于定子铁心上。具有体积小、成本低、结构简单和性能可靠等优点。考虑到电动舵机系统中电路部分及电机电枢出现故障的概率比较大,而电机的机械本体可靠性较高,因此,采用两套控制器分别连接两套电机电枢绕组,从而构成双余度电动舵机。其原理框图如图6所示。
(5)温控设计。由于系统工作环境特殊要求,舵机系统必须采取温控措施。温控系统由温度传感器、A/D转换电路和加热丝等部分组成。温度传感器选用半导体温度传感器,该型传感器输入电源范围宽,输出为与绝对温度成正比的电流源形式,输出线性好,精度高,感温范围宽。A/D转换器选用12位的转换器,精度满足温度控制精度要求。
电阻丝加热带是采用聚酰亚胺薄膜型加热带,包括加热带绝缘材料、电热材料、加热带引线等。这种电加热带的突出优点是厚度小,电绝缘层和电热层的总厚度仅为0.09~0.14mm;每单位面积的质量为360~370g/m,且耐高低温。
综上,该数字化电动舵机的工程设计,采用计算机模糊滑模变结构和三环控制技术,并针对特殊要求设计了双余度和温控功能,经调试实践检验,位置控制精度≤1°,空载最高转速≥30°/s,转动位置范围≥±30°,最大输出力矩≥30Nm,各项指标满足指标要求。
猜你喜欢
汽车维修技师(2019年7期)2020-01-16
自动化学报(2019年6期)2019-07-23
汽车维修技师(2018年11期)2018-05-11
电子制作(2018年1期)2018-04-04
中学生数理化·高一版(2017年1期)2017-04-25
制造业自动化(2017年2期)2017-03-20
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
舰船科学技术(2015年8期)2015-02-27
