平面连杆机构的计算机辅助设计
2011-10-13 14:31:26段晓华
太原城市职业技术学院学报 2011年8期
段晓华
(临汾职业技术学院,山西 临汾 041000)
平面连杆机构的计算机辅助设计
段晓华
(临汾职业技术学院,山西 临汾 041000)
文章讨论利用SolidWorks进行平面连杆机构设计,解决了传统图解法存在的问题并对机构进行运动模拟和运动分析,从而更加生动、直观地展现平面连杆机构的运动特性。
平面连杆机构;SolidWorks;设计;运动模拟
平面连杆机构是各构件用销轴、滑道(低副)连接而组成的平面机构。由于运动副元素是回转面或平面,具有承载能力强、耐磨损、制造方便等特点,且能实现转动、摆动、移动等复杂的运动转换,因此在各种机械中应用广泛,其中以由四个构件组成的平面四杆机构应用最广泛,是组成多杆机构的基础。
笔者多年在教学实践中发现,若采用SolidWorks软件的二维草图功能设计机构,则能够取代传统的“手工”绘图的方式,既可克服传统图解法精度低、作图繁的缺点,又保留了其原理简单、方法直观的优点,并且无须建立解析法所必须建立的复杂的数字关系式,还可以进一步建立机构的三维模型进行运动模拟,使复杂的设计过程变得简单快捷。SolidWorks软件是一款机械设计自动化软件包,具有强大的实体造型功能,可以快速设计出三维实体零件,并进行虚拟装配及三维实体机构的运动模拟、运动分析。论文主要讨论如何使用SolidWorks设计平面连杆机构的各构件尺寸,根据尺寸参数建立零件模型并进行装配,进一步对装配体进行运动模拟及分析。
一、平面连杆机构的设计过程
平面连杆机构的设计,就是根据对机构的运动要求并结合附加要求,确定机构各构件的尺寸参数,设计出满足运动要求的机构。运动要求有两类:实现已知运动规律;实现已知运动轨迹。附加要求可能有:有曲柄存在、γmin≥[γ]及机构外部尺寸或某构件尺寸的限制等。
平面连杆机构设计时,根据SolidWorks软件参数化设计的特点,利用尺寸驱动和约束关系,在绘制图形时不强调绘制的直线的长度、圆弧大小,而是强调绘制的形状和几何关系。草图实体的大小和形状将最终由标注的尺寸和正确的几何关系来决定。在绘图时,可以先绘制大概的尺寸利用“智能尺寸”按钮来标注尺寸。SolidWorks中的几何关系有:水平、竖直、垂直、平行、相切、同心、中点、重合、相等、对称等等。系统提供了实时反馈功能,可根据绘图过程中对不同实体的响应,利用鼠标光标形状的变化、附加符号以及推理线显示出绘图状态自动添加相应的几何关系。必要时还可手动添加,选中需添加几何关系的对象在特征管理器几何关系列表中选择。
例:已知摇杆LCD=150mm,摆角ψ=300,行程速度比系数K=1.25,若机架LAD=225,试确定曲柄LAB和机架LBC的长度。校检它们的最小传动角γmin,取[γ]=400。
设计具有急回特性的曲柄摇杆机构通常“按给定行速度变化系数”来设计平面四杆机构。
(2)根据摇杆长度LCD及摇杆摆角ψ,作出摇杆的两极限位置C1D及C2D。在图形窗口任选一点为固定铰链中心点D,绘制两条线C1D、C2D,标注尺寸∠C1DC2=200,过D点绘制一条中心线,选中C1D、C2D、中心线添加“对称”几何关系。
(3)作C2P⊥C1C2,作C2P使∠C2C1P=90°-θ,交于P。画直线C2P、C1P,使直线C2P“竖直”,标注∠C1PC2=θ。
(4)作△P C1C2的外接圆。画圆选择“周边圆”选项,过
P、C1、C2三点。则曲柄的固定回转副A点必在此圆上。设计时,应注意为了满足运动的连续性要求,A点不能选在EF劣弧段上。
(5)确定A点。除EF劣弧外任选一点作直线AC,使A于△P C1C2的外接圆重合。标注AD=225。
(6)确定AB。设曲柄为a,连杆为b,则:AC1=a+b AC2=b-a=>a=(AC1-AC2)/2,以A为圆心,AC2为半径作弧交于G,过GC1中心画圆,过A点画圆,两圆添加“相等“几何关系。AB1为曲柄长度。
(7)利用“工具”菜单下的“测量”工具可测得设计结果为:曲柄长度LAB=56mm,连杆长度LBC=196mm。
(8)校核最小传动角。曲柄摇杆机构的最小传动角出现在曲柄与机架两次共线位置之一。过A点作直线C2B2;作圆心为D的弧C1C2;连接BC,C于弧C1C2重合;使C2B2、BC相等。∠BCD为最小传动角。利用智能尺寸标注可知,∠BCD=42.250满足设计要求。

二、平面连杆机构的虚拟装配及运动分析
1.零件建模
建立一个新零件文件,根据图2绘制草图,拉伸厚度为5mm,零件建模完成保存文件名为“曲柄”。其他构件只需将长度尺寸更改分别保存,即可得到摇杆、机架、连杆的模型。
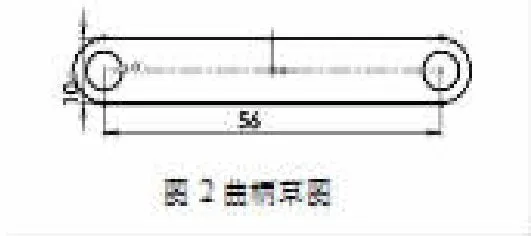
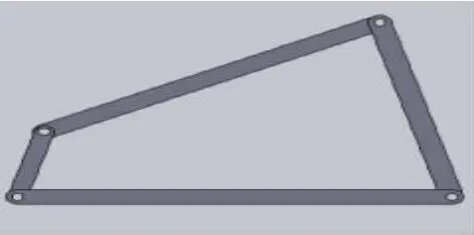
图3
2.平面连杆机构的装配
建立一个新装配体文件,将完成的机架、曲柄、连杆、摇杆零件添加装配,组成装配体文件。装配的过程就是按照一定的约束条件(重合、平行、相切、同轴心等)把各零件配合起来,本例中机架与曲柄采用重合和同轴心配合;曲柄与连杆、连杆与机架配合相类似。装配体完成如图3。
3.平面连杆机构的运动模拟及分析
激活SolidWorks Motion插件(查看“工具”/“插件”/“SolidWorks Motion复选框”是否选中。)(1)打开[运动算例1]标签,切换到solidWorks Motion管理器。(2)添加旋转马达(使曲柄以3600/s的速度匀速转动,完成一次工作循环)。从SolidWorks Motion管理器工具栏单击“马达”按钮,在“马达类型”下,选择旋转马达;在“零部件/方向”下,选择曲柄LAB;在运动下,选择“距离”360deg、开始时间0秒、结束时间1秒确定。(3)运动模拟。在SolidWorks Motion管理器左侧的算例类型下,选择“运动分析”。运动模拟的持续时间由最顶部的时间线决定。将时间线的结束时间键标移到1秒。单击“计算”图标,留意计算过程中的运动模拟。单击[播放]图标可反复播放机构运动。(4)查看结果。为摇杆绘制角速度和加速度。单击[结果和图解]图标,在“结果”下选择“位移/速度/加速度、角速度和幅值”确定以显示“LCD的角速度、LCD的角加速度”的图解。见图4、图5。

图4 LCD的角速度
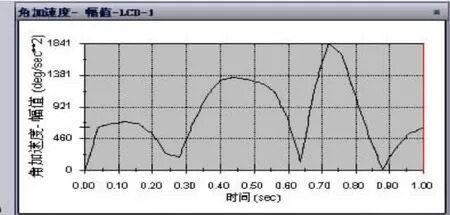
图5 LCD的角加速度
利用SolidWorks软件进行平面连杆机构设计和分析,既避免了大量繁锁的数学计算,又达到了预期设计的精度要求,使繁琐的作图过程变得简捷,还能够使学生直观地观察机构的运动状态,从而更加深入了解机构的运动特性,达到事半功倍之功效。
[1]黄劲枝.机械设计基础[M].北京:机械工业出版社,2002.
[2]张晋西,郭学琴.SolidWorks及COSMOSMotion机械仿真设计[M].北京:清华大学出版社,2001.
TP
A
1673-0046(2011)08-0166-02
猜你喜欢
电脑爱好者(2022年5期)2022-05-30 14:58:47
机械工程师(2021年4期)2021-04-19 07:27:56
南方农机(2021年3期)2021-02-07 09:07:04
湖北农机化(2020年17期)2020-11-02 07:46:54
家庭影院技术(2019年12期)2020-01-19 02:07:20
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:36:58
工业设计(2016年4期)2016-05-04 04:00:27
河南科技(2014年6期)2014-02-27 14:06:47