论莫尔条纹的计算
2011-09-29 12:18龚仲华
制造技术与机床 2011年3期
龚仲华
(常州机电职业技术学院,江苏常州 213164)
光栅是数控机床等机电一体化设备常用的位置检测装置,其工作原理早为人们所熟知。一次偶然的机会,笔者发现某高校教材中所给出的莫尔条纹节距计算式存在错误,因而专门浏览了其他教材及相关参考书,不料这样的错误竟然十分普遍,乃至于未见正确的计算式。为此,本文将对光栅莫尔条纹的正确计算式进行分析与证明,以供读者参考。
1 问题的提出
众所周知,绝大多数光栅都是通过如图1b所示的夹角为θ的标尺光栅与指示光栅所产生的莫尔条纹来放大栅距W(光栅的条纹间距)、提高测量分辨率的,因此,分析光栅工作原理需要确定莫尔条纹节距B与光栅栅距W、夹角θ的关系问题。归纳目前教材与参考书中所提供的莫尔条纹节距B计算式,主要有以下3种:

式(1)[1-2]与式(2)[3-4]为标尺光栅与指示光栅在栅距同为W时的计算式;部分书籍还提供了指示光栅栅距为a、标尺光栅栅距为b时的计算式[5-6]:

以上3个计算式都是错误或片面的。
从图1b可见,式(1)误将倾斜条纹被相邻两垂直条纹所截线段(图1b中的粗线段)的长度直接当成了莫尔条纹的节距B,这显然不正确。

式(2)已注意到这一问题,它在计算式(1)的基础上通过三角函数变换,由B=(W/sinθ)·cos(θ/2)=W/[2sin(θ/2)]得到结论。如仅从图1b上看,这一结论似乎是正确的。但是,如进一步分析当两光栅夹角θ=180°时的情况,此时由于两光栅相互平行,实际上不可能得到上下移动的莫尔条纹,但按计算式(2)得出的结果为B=W/2,这就意味着光栅能生成节距为W/2的莫尔条纹,此结论显然与实际情况不符。
由下面的分析可知,式(3)所提供的莫尔条纹节距计算式是不正确的。
2 分析要点
以上计算式错误的原因在于,他们没有根据莫尔条纹产生的一般规律来分析问题,所得到的结论或只适用于特定情况或存在错误,因此,不能正确解释莫尔条纹的普遍现象。
计算莫尔条纹节距B必须先计算莫尔条纹的水平夹角α(图2),即确定条纹的运动方向,这是分析问题的关键。因为,α一旦为90°,条纹就不再有垂直方向的上下运动,节距也就失去了意义。
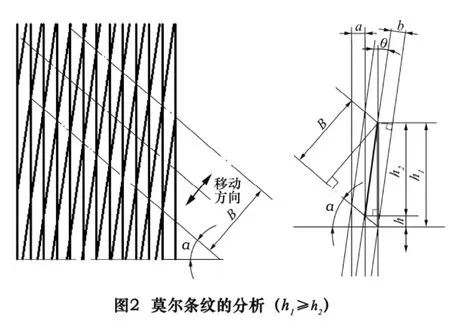
莫尔条纹的节距B、夹角α不但与两光栅的夹角θ有关,而且还与光栅的栅距有关。栅距不同的光栅同样可以生成莫尔条纹,这一点在分析时同样必须清楚。莫尔条纹夹角α的分析方法如下:
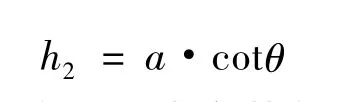
假设倾斜条纹的宽度为b、垂直条纹的宽度为a,从图2可以得到垂直条纹被相邻两倾斜条纹所截部分的长度h1为
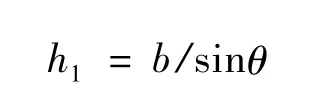
倾斜条纹被相邻两条垂直条纹所截部分在垂直方向的投影长度h2为
h1与h2之间的关系是决定莫尔条纹水平夹角α、节距B的关键,必须由此入手,通过对不同情况的分析,才能得到正确结论。
3 正确的计算式
莫尔条纹的节距B、夹角α与h1、h2有关,在不同情况下的计算式可以推导如下。
3.1 h1≥h2
当h1≥h2时,莫尔条纹的情况如图2所示,因此有:


即莫尔条纹的节距B与垂直条纹宽度b直接相关。
由式(5)可见,若光栅夹角 θ=0°或180°,则夹角α为90°,故无垂直方向移动的莫尔条纹;或简单地从式(6)上理解为B=∞,这也可解释无莫尔条纹的实际情况。
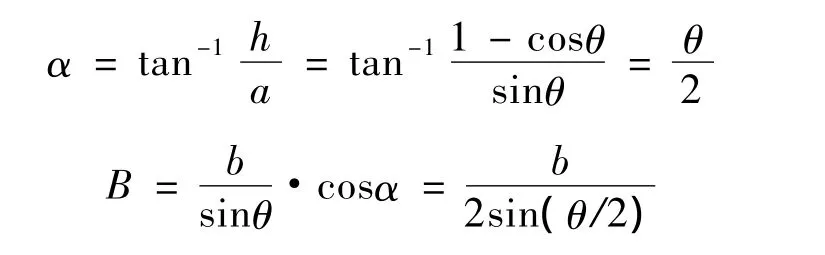
对于a=b的特殊情况,可得到:

由此可见,式(2)仅是在特殊情况下所得到的特殊结论,而不能用来解释普遍现象。
3.2 h1<h2
h1<h2时的情况较为复杂,分析如下。
① 如h1<h2≤2h1,其情况如图3所示,计算方法如下:
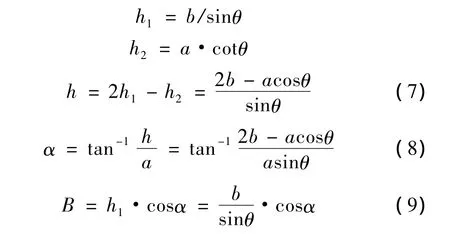
即:莫尔条纹的节距B与倾斜条纹宽度b直接相关。式(8)与式(9)同样可以解释θ=0°或180°两种特殊情况。

对于a=2b的特殊情况,则存在以下结论:
与a=b的情况相比,这时所产生的莫尔条纹其水平夹角α不变,但节距B是a=b时的1/2(图4)。

②对于栅距相差更大的光栅,同理可推出其计算式。如2h1<h2≤3h1,则:

同样对于a=3b的特殊情况,这时所产生的莫尔条纹水平夹角仍然为θ/2,但节距B是a=b时的1/3。依次类推,可得出3h1<h2≤4h1等情况下的结论。以上结论可以直接通过实验证明,也可以简单地用CAD制图进行模拟验证。
4 结语
光栅莫尔条纹的分析与计算只需要简单地利用三角函数便可进行,特别是在CAD技术普及的今天,还可用CAD直接进行验证,因此,在教材、设计手册等较为严肃的参考书籍中,还是有必要进行深入、仔细的分析,以防止出现基本概念上的错误而误导读者。
[1]何玉安.数控技术及其应用[M].北京:机械工业出版社,2004.
[2]上海市电气自动化研究所.机床数字控制与计算机应用[M].北京:机械工业出版社,1982.
[3]王永章.数控技术[M].北京:高等教育出版社,2001.
[4]张燏.机电一体化概论[M].北京:人民邮电出版社,2009.
[5]赵先仲.机电系统设计[M].北京:机械工业出版社,2004.
[6]李谋.位置检测与测量技术[M].北京:机械工业出版社,1991.
猜你喜欢
大学物理(2022年7期)2022-07-26
轮胎工业(2022年4期)2022-07-20
花火·绘阅读(2021年8期)2021-09-05
轮胎工业(2021年1期)2021-07-19
哈尔滨轴承(2020年2期)2020-11-06
童话世界(2019年28期)2019-11-23
电子制作(2019年24期)2019-02-23
北方交通(2016年12期)2017-01-15
中国机械工程(2016年13期)2016-07-26
中国铸造装备与技术(2016年1期)2016-04-08