
悬停式AUV控制策略研究
2011-09-24 05:55李文涛
海洋工程 2011年1期
李文涛,葛 彤
(上海交通大学海洋工程国家重点实验室,上海 200030)
悬停式AUV控制策略研究
李文涛,葛 彤
(上海交通大学海洋工程国家重点实验室,上海 200030)
以悬停式AUV“MM-01”为试验平台,设计一种基于行为的控制体系结构。将AUV的行为划分为漫游、巡航和避障三个基本行为,并将模糊控制引入避障行为中,通过基于优先级的仲裁方式实现三种行为的有序协调,完成预定任务。同时,针对AUV的悬停需求,提出了增加内环速度反馈实现AUV稳定悬停的控制方法,定义一种新的高层自治控制系统与底层运动控制系统的接口。最后,通过建立整个系统的Simulink仿真模型,验证了该控制策略的有效性。
AUV;悬停;基于行为;优先级仲裁;仿真
Abstract:A control architecture based on behaviors is designed for the hovering-type AUV test bed“MM-01”.Three basic behaviors,including Wander,Cruise and Obstacle-Avoid,realized by fuzzy logic control,are defined.AUV′spredefinedmission can be performed by the sequential coordination of those behaviors based on priority.Besides,this paper proposes to introduce inner-loop velocity feedback into motion control to realize AUV′shovering function and definesa new kind of interface between high-level autonomous control block and low-levelmotion control block.Finally the simulation of thewhole system is executed in Simulink and the results validate the efficiency of the designed control strategy.
Key words:AUV;hovering;behavior-based;coordination based on priority;simulation
根据使命任务的不同,AUV(无人自治潜水器)可以分为巡航式AUV和悬停式AUV,前者用于大范围的海域调查,后者用于小范围内的精确定点调查和作业[1]。巡航式AUV在海洋调查中已经获得越来越广泛的应用,而悬停式AUV是近年来出现的一种新型潜水器,它能依靠自身的推力系统,在控制系统的指挥下抵抗海流和自身作业等引起的内外扰动,使其保持某一姿态悬停于空间某一特定位置[2],即具备一种动力定位能力。悬停式AUV既有AUV的自治能力,又有ROV的机动能力,其发展目标是成为一种高度自治并能够实现精确定点调查和作业的新型潜水器。由于在海底热液喷口的观察取样和海洋结构物探测方面具有不可替代的重要作用,悬停式AUV的研究具有显而易见的重要意义,各国相继积极开展了相关研究[3-4]。
控制策略是AUV自主地完成各种任务的指导思想,因而控制策略研究是设计悬停AUV的首要步骤。传统的机器人控制方法是建立在严格精确的控制系统数学模型的基础上,无法适用于具有强耦合性和非线性特点的AUV及其复杂多变的未知环境,而基于行为的控制结构是一种反应式结构,不需建立全局世界模型,因而非常适用于AUV的控制体系。AUV控制体系包括自治控制系统和运动控制系统,二者的功能划分及其接口定义是整个体系设计的基础。此外,AUV的动力定位是依靠垂推和侧推实现的,对具体的控制方法进行深入探究有助于提高动力定位的性能。在控制策略的上述方面进行了综合研究,并完成了仿真,结果验证了设计的控制策略的有效性。
1 悬停式AUV使命任务与本体结构
为了实现精确定点作业和调查的功能,AUV必须能够在三维空间内从起始点自治地驶向目标终点并悬停,其中起始点、子目标点和终点预先定义,如图1所示。航行过程中若发现前方有障碍物,AUV须自动避障,之后寻找原轨迹继续驶向目标点。若丢失对当前位置导航信息的感知,则以大范围回转方式漫游,直至重新获得导航信息。
AUV的本体“MM-01”如图2所示,由主艇体和左右两个电池舱组成。主艇体分为前后舱,分别为设备舱和电控舱。AUV共有4个推进器,包括两个纵向主推、一个侧推和一个垂推。两个主推方向与纵轴平行,垂推和侧推均布置在AUV中横剖面位置,推进器的布置符合对称原则,这样保证了AUV具有四个自由度的机动能力:进退、侧移、潜浮和转首。值得注意的是:设计侧推的目的是使AUV具备悬停能力,这是与常规的巡航式AUV的推进器布置方面的最大区别,也是悬停式AUV结构方面的最本质特征。

图1 AUV的使命任务Fig.1 AUV′smission

图 2 “MM-01”本体Fig.2 Main body of“MM-01”
2 AUV控制策略设计
2.1 AUV控制体系结构
“MM-01”的控制体系结构如图3所示,包括任务使命、行为决策、底层运动控制、AUV和传感器模块,其中任务使命和行为决策模块共同构成了AUV的高层自治控制系统。任务使命模块内部保存航行任务参数,由于比较简单,该模块实际被分解到了行为决策模块的不同行为中。行为决策模块包括基本行为和仲裁器,前者包括漫游、巡航、避障,仲裁器用于协调多个行为的冲突。自治控制系统将计算得到的控制指令送给底层运动控制器,后者得到各自由度的推力和力矩,经推力分配送给AUV。
2.2 具备悬停功能的运动控制系统设计
非智能潜水器的经典运动控制模式如图4所示。其中ξ、η、ζ、Ψ分别表示潜水器在绝对坐标系中的三维坐标和首向角,下标g表示期望值,i表示实际值;ex、ey、ez、eΨ分别表示潜水器与目标点在运动坐标系中的三维坐标偏差和首向角偏差。由于悬停式AUV常在低速下运动,可以将运动控制分为水平面控制和垂直面控制,并近似认为各自由度之间不存在耦合关系,然后分别设计控制器。为了实现AUV的悬停功能,在水平面运动控制回路中,除对偏差信号进行比例控制外,提出引入内环反馈即速度(角速度)反馈的思想,这将大大改善闭环性能,使系统更易稳定。
为了更好地实现清晰分工的模块化思想,定义高层自治控制系统与运动控制系统的接口为e=[exeyezeΨ],并将图4虚线框中的部分定义为运动控制模块。
水平面和垂直面运动控制律:

式中:Kex、Key、KeΨ、Kez为偏差比例调节系数 ,符号为正;Ku、Kv、Kr为速度反馈增益系数 ,符号为负。
由于四个推进器按前述方式对称布置,Tx和MTz经过推力分配得到两个水平主推的推力,Ty和Tz则分别对应侧推和垂推的推力。
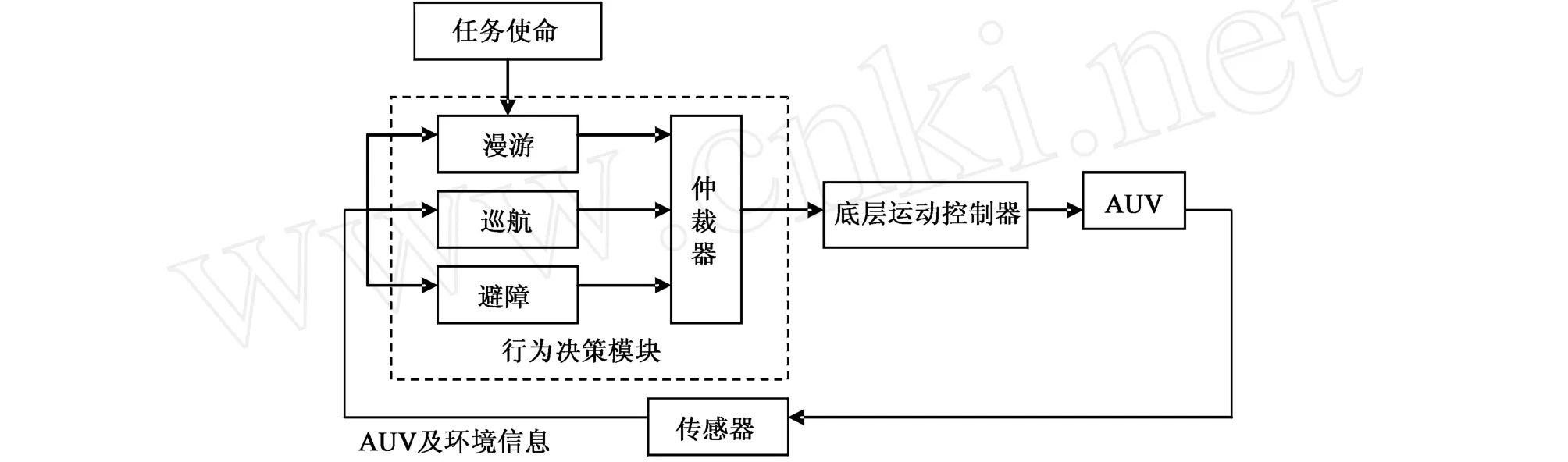
图3 MM-01控制体系结构Fig.3 Control structure of“MM-01”

图4 运动控制原理Fig.4 Motion control scheme
2.3 基于行为的自治控制系统设计
2.3.1 行为接口与仲裁
基本行为与仲裁器的接口指令eb同时包括相应的行为激活指示符和目标点与潜水器在运动坐标系中的三维位置偏差和首向偏差,即eb=[bisactiveexeyezeΨ],其中bisactive是布尔变量,对漫游、巡航、避障行为而言分别是Wanderactive、Cruiseactive、Aroidactive,表示某行为是否激活,是则bisactive=1,否则bisactive=0。
若在同一时刻有多个行为被激活,则由仲裁器决定哪个行为的指令此刻将得到执行。采用基于固定优先级机制的仲裁器,事先设定不同行为的优先级。当多个行为同时发生时,优先级高的行为将首先得到执行,低优先级的行为被抑制,直到没有优先级比它更高的行为激活时,低优先级的行为才得到执行。换言之,仲裁器的输出为e=[exeyezeΨ],对应当前时刻激活行为中优先级最高的行为送出的指令偏差。优先级的高低根据行为的重要性和紧急情况设定,中的三个行为按优先级从低到高依次是漫游、巡航、避障。漫游行为是底层的本能行为,始终激活,用于在失去位置导航信息的时候随机漫游,以等待优先级更高的任务被激活。巡航行为用于完成三维空间内的轨迹遍历,在当前位姿可测时激活。如果前进路径上出现障碍物,且障碍物危及到了潜水器的自身安全(到潜水器的距离小于5 m),则避障行为被激活。巡航行为具有目标导向功能,而避障行为具有实时反应能力,通过二者的协同作用,潜水器可以实现绕过障碍物抵达目标点的任务。
2.3.2 漫游行为
漫游行为有以下两种模式:
1)当潜水器能获得当前绝对位置导航信息时,游向固定点。行为自身存储目标点坐标以引导潜水器的运动。只需实时计算潜水器与目标点在绝对坐标系下的三维位置偏差和首向角偏差,进行坐标变换得到ewander=[WanderactiveexwandereywanderezwandereΨwander]即可。
2)当潜水器不能获得当前绝对位置导航信息时,按固定方式运动。由于本研究中采用水池中央顶部的摄像头对AUV进行绝对定位,当AUV在视野边缘或光线不足时,可能导致摄像头无法捕获AUV当前绝对坐标ξ、η,此时漫游行为输出常值偏差指令ewander=[WanderactivelcoseΨlsineΨ0eΨ],eΨ可设定为范围在[0]内的任意值,即潜水器以一定的半径大范围回转(半径大小可由调整),直至摄像头重新获得潜水器的绝对坐标。
2.3.3 巡航行为
行为实时比较当前位姿和由子目标点决定的期望位姿得到偏差指令,如式(2)所示。

式中各变量的含义与2.2节相同。行为自身预存航行任务参数,包括各目标点位置坐标和遍历顺序。设计中规定两个相邻子目标点须保证在同一水平面上或不同水平面的同一垂线上,这样AUV就只有两种基本运动状态:定深航行和垂直潜浮。二者的控制策略如下:
1)定深航行:当潜水器距离当前子目标点较远时,Ψg为当前位置和目标点连线的方向角,该值随AUV的运动实时变化;当潜水器距离目标点非常近时,Ψg设定为某一常值(如上一子目标点与当前子目标点的连线在绝对坐标系中的方向角),即进行定向航行。这样可以避免潜水器在距离目标点非常近时频繁调整首向的情况,从而最终悬停在目标点。
2)垂直潜浮:类似地,设定Ψg为某一常值(潜水器在上一子目标点处的悬停首向角)。
每次到达当前子目标点,则从数据库中取出下一个点作为新的当前子目标点,直至到达终点。巡航行为的输出为
2.3.4 避障行为
借鉴人类避障的思想,利用模糊控制方法设计模糊避障控制器[5],解决避障问题。
巡航行为中的当前目标点是固定的,AUV只需实时比较当前位置与当前目标点之间的偏差,即可得到控制指令eb。而避障行为则完全不同:由于障碍物外形是不可预测的,AUV的航行路线也是不可预测的,所以航行过程中的当前目标点是实时变化的,将其定义为“虚目标点”。为简单起见,将“虚目标点”始终设定为AUV左前方或右前方2 m处的点,目标点方向与当前首向的夹角大小和正负由控制器决定。避障示意如图5所示。避障传感器为前视摄像机和激光器,激光器安装在AUV的头部两侧,间距0.5 m,安装方向与AUV的轴线平行,配合摄像机可以测得左右两侧到障碍物的距离dl、dr。设计模糊避障控制器,输入量为dl、dr。输出量为转向角增量ΔΨ(为方便计,后面用Ψ表示),如图6所示。
输入量的论域为{0,5},模糊集合为di={nearmedfar},i=l,r;输出量Ψ的论域为模糊集合为{NBNSZOPSPB}。其中near,med,far分别表示距离近、距离适中和距离远;NB,NS,ZO,PS,PB表示向左急转、向左转、不转、向右转、向右急转。di和Ψ的隶属函数均采用三角形函数,如图7所示。
根据人类避障的经验,设计针对圆柱形障碍物的模糊避障控制规则(见表1),并采用最大隶属度法对输出量进行清晰化处理。

图5 避障过程示意Fig.5 Sketchmap of obstacle-avoiding behavior

图6 模糊避障控制器Fig.6 Fuzzy logic controller

图7di和Ψ的隶属函数Fig.7 Member function fordiandΨ
避障的原则是往没有障碍物或障碍物距离更远的一侧转向,当两侧障碍物距离相等时,默认向右转。转向的程度与最近的障碍物距离相关,与障碍物的距离越近,转向角度越大,反之越小。行为输出为eavoid=[Avoidactiveexavoideyavoid
ezavoideΨavoid],显然有下列关系:

于是,只要得到了Ψ就可以得到避障行为的输出指令。AUV避障过程:当视野前方没有障碍物时,AUV执行巡航行为,趋向目标点;当前方出现障碍物并且危及到自身安全时,避障行为被激活,AUV向远离障碍物的方向运动,当前方没有障碍物时,巡航行为再次被激活。AUV就是通过这两种行为间的反复切换来实现避障和到达目标的双重目的。
3 控制策略仿真与分析
为了验证控制策略的有效性,进行了AUV全系统的Simulink仿真。其中AUV动力学模型是依据试验平台“MM-01”的参数建立的状态方程模型 ,模型的状态量为u、v、w、q、r、θ、Ψ、ξ、η、ζ,即 AUV 的运动(角)速度和在绝对坐标系中的位置和姿态(除横倾和横倾角速度外)。
3.1 漫游行为
设定AUV的初始状态为u=0.514 4m/s,v=w=0,q=r=0,在原点出发,目标点PG=(5,5)。仿真时间t=200 s,假设在时间t=5 s至t=30 s内,AUV失去了位置导航信息,而在t=30 s以后又重新获得该信息。运动轨迹如图8所示。可见,当失去导航信息时AUV进行了大范围回转的漫游,在获得导航信息后重新驶向目标点,最终在PG实现了悬停。
3.2 巡航行为
设定子目标点序列为:P1=(5,5,0),P2=(10,5,0),P3=(10,5,5),P4=(15,10,5),P5=(20,10,5),P6=(25,15,5),初始状态与漫游行为中的设置相同,仿真时间t=1 500 s。
仿真结果如图9~11所示,其中图9为三维运动轨迹,图10~11分别为其顶视图和侧视图。可见,AUV可靠地完成了定深航行和垂直潜浮的动作,准确地遍历了6个目标点,最终在终点实现了稳定的悬停,这与我们的设计思想是吻合的。
3.3 避障行为
研究水平面内的避障,通过避障和简化的巡航行为结合实现避障目的。设定目标点PG=(20,0),初始状态与漫游行为中的设置相同。设置圆柱形障碍物,圆心O=(10,0),分别设半径R=0.5、1、2 m,以演示控制策略在面对大小不同的障碍物时的避障能力。
仿真结果如图12所示。AUV成功地避开了R=1m和R=2m的圆形障碍物,却撞上了R=0.5m的障碍物,这是由于两侧激光器之间的距离相对较大,无法较好地识别体积较小的障碍物,该问题可以通过在AUV头部中央加装激光器加以解决。AUV躲过障碍物后,都重新规划航线,最终顺利地到达了预定的目标点PG。

图8 漫游行为的运动轨迹Fig.8 Moving trajectory of wander behavior
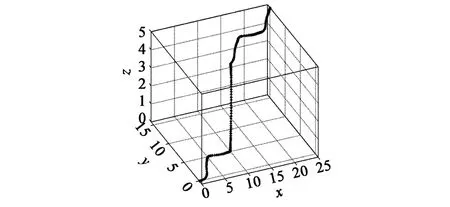
图9 巡航行为的三维运动轨迹Fig.9 3D moving trajectory of cruise behavior

图10 顶视图(XY)Fig.10 Top view

图11 侧视图(XZ)Fig.11 Lateral view

图12 避障轨迹Fig.12 Moving trajectory of obstacle-avoiding behavior
3.4 多行为仿真
设定AUV的初始状态与前述设置相同,子目标点序列:P1=(5,5,0),P2=(10,5,0),P3=(10,5,5),P4=(15,10,5),P5=(25,10,5),P6=(30,15,5),在前进的必经路径上设置圆柱形障碍物,圆心O=(22,10),半径R=1 m,高度h=6 m。假设在时间t=5 s至t=30 s内,AUV失去了位置导航信息,在t=30 s以后又重新获得该信息。仿真结果如图13~14所示。
可见,在行为仲裁器的有序协调下,AUV完成了大范围回转和轨迹点遍历,并成功地躲过了障碍物,最终顺利到达航行任务的终点,并完成了稳定的悬停。结果有力地证明了控制策略的有效性。

图13 多行为结合的三维运动轨迹Fig.13 3D moving trajectory ofmultiple behaviors
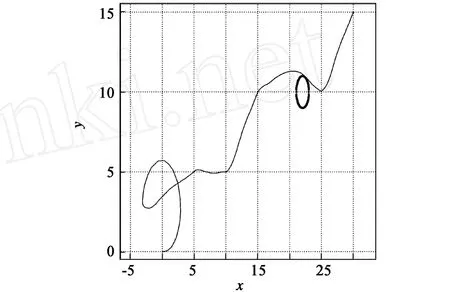
图14 运动轨迹顶视图(XY)Fig.14 Top view
4 结 语
主要讨论了实现AUV的悬停、大范围回转漫游、三维空间内的轨迹点遍历和自主避障的控制方法。仿真结果验证了基于行为的控制结构应用于AUV控制的有效性,同时也表明内环反馈在AUV的悬停控制中具有关键意义。提出的悬停运动及自治控制策略对悬停式AUV今后的研究开发具有重要的启示作用,可以应用于工程实际。
[1] Tamaki Ura.History of R&D and deploymentsof AUVs constructed at ura laboratory during 1984-2009[R].Shanghai:Shanghai Jiao Tong Univesity,2009.
[2] 郝颖明,吴清潇,周 船,等.基于单目视觉的水下机器人悬停定位技术与实现[J].机器人,2006,28(6):656-661.
[3] Cuf X,Garcia R,Ridao P.An approach to vision-based station keeping for an unmanned underwater vehicle[C]∥Proceedingsof the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems.2002:799-804.
[4] Doucy O,Brutzman D,Healey A.Near surfacemanoeuvring and station-keeping for an autonomous underwater vehicle[C]∥NATO Symposium.2000.
[5] 石辛民,郝整清.模糊控制及其Matlab仿真[M].北京:清华大学出版社,北京交通大学出版社,2008:89-113.
Research on control strategy of a hovering-type AUV
LIWen-tao,GE Tong
(State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200030,China)
TP242.6
A
1005-9865(2011)01-0075-07
2010-04-12
上海交通大学海洋工程国家重点实验室自主研究课题资助项目
李文涛(1986-),男,山东泰安人,硕士生,主要从事水下机器人的运动控制方面的研究。
猜你喜欢
佳木斯大学学报(自然科学版)(2022年2期)2022-08-24
中国船检(2019年6期)2019-11-29
系统工程与电子技术(2018年12期)2018-12-10
意林·少年版(2018年10期)2018-05-30
中国军转民(2017年9期)2017-12-19
百科探秘·航空航天(2016年6期)2016-12-01
系统工程与电子技术(2016年2期)2016-04-16
武汉理工大学学报(信息与管理工程版)(2012年5期)2012-08-01
早期教育(家庭教育)(2009年9期)2009-10-20
