基于PLC的直流电动机软启动器的设计
2011-09-20 02:55:38杨扬贺明智孙利娟夏欢
电气自动化 2011年6期
杨扬 贺明智, 孙利娟 夏欢
(1.北京交通大学 电气工程学院,北京 100044;2.北京京仪椿树整流器有限责任公司,北京 100040)
0 引言
在电力、化工、钢铁、铸造、塑料材料加工、环保、通讯等领域广泛使用的备用蓄电池组动力中,均为直流电动机拖动系统。在断电情况下为维持水冷却、油润滑油压,需要迅速投入备用电源。此类电机的启动、运行稳定性和可靠性要求非常高,而在电机启动时产生的冲击电流很容易造成电机的损坏,影响电机使用寿命,因此直流电动机的起动方法也越来越受到人们的重视。本文提出了一种基于PLC控制的直流电动机软启动器的设计。
1 直流电动机软启动的原理

式中:U为电动机的电枢端电压;Ea为电枢感应电动势;Ia为电枢电流;Ra为电枢回路电阻,包括电枢绕组和换向极绕组电阻;2ΔUs为一对正、负电刷下的接触电压降;Ce为电动势常数,由电机的结构参数决定;Φ为每极磁通;n为转速。
对于直流电动机而言,在未启动之前n=0,Ea=0,而R一般很小,为零点几欧姆到一点几欧姆。当电动机直接接入电网并施加额定电压时,由于机械惯性作用n不突变,即加电压瞬间n=0,启动电流Ist为

直流电动机的启动过程可用其基本方程来解释
该电流很大,一般情况下能达到其额定电流的10-20倍。过大的启动冲击电流对电动机是非常有害的。
直流电动机软启动技术在此基础上产生,通常软启动设计要求在保证启动时间的同时,使启动冲击电流在额定电流两倍范围内。现在常用的软启动控制策略有以下两种。
(1)电枢回路串接变阻器启动。此方法在电枢回路中串接入变阻器,通过增大启动时的电枢电阻来减小启动冲击电流,待电动机转动起来即反电势Ea建立起来后,再将电枢电阻值调回实际电枢电阻Ra(或将变阻器直接旁路)。
(2)降压启动。降压启动时通过降低电动机的电枢端电压U来限制启动冲击电流。这种方法需要专用直流电源(即软启动器)。启动时,电源电压由小增大,电动机转速以规定的加速度上升,避免了大的冲击电流。本文中所设计的直流电动机软启动器采用降压启动的方法来实现。
2 直流电动机软启动器的设计
直流电动机软启动器的总原理框图如图 1所示。输入为220 V直流,主电路包括滤波吸收环节和 IGBT模块;负载为他励直流电动机,通过从输入端并联一路电源给励磁供电;控制电路主要包括PLC控制器、驱动电路、开关电源、输出采样、人机交互界面等。
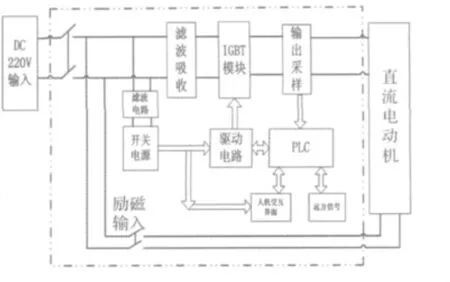
图1 总原理框图
2.1 主电路设计
由于考虑到设备运行的稳定性和可靠性要求非常高,所以主电路采用BUCK电路。BUCK电路具有稳定可靠、器件少、效率高,输入输出电流连续的优点。图2中,CK为输入断路器,KM为励磁接触器。为防止输入直流电源正、负反接,直流母线上串联一个防反二极管D1。C1、C2组成滤波吸收环节,其中C1为输入直流滤波电容,C2为IGBT高频吸收电容。由于实际所用的开关管只是IGBT模块内部两个开关管中的一个,所以另一个管将由控制脉冲将其一直封锁,并且将其反并联的二极管用作主电路续流二极管,这样可提高器件的一致性和利用率。
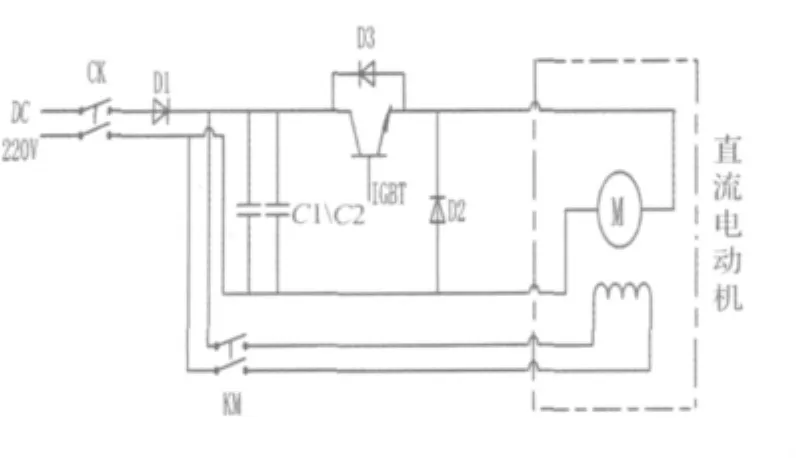
图2 软启动器主电路
2.2 控制逻辑及算法
本软启动器主控器件为西门子PLC控制器,选用的控制CPU型号为S7-224XP,并扩展一块数字量输出模块EM222,采用梯形图进行编程。CPU除了具有常规的逻辑控制作用外,它还产生PWM信号通过驱动板控制IGBT的开通与关断;同时将输出的电压、电流信号采样,通过MPI通信的方式给人机界面显示。
软启动器的PLC控制逻辑如图4所示。控制方式有远程与本地控制两种,开机时先将励磁接触器KM闭合,电枢电压由程序设定的一个初始值开始按启动控制曲线变化,直至达到全压输出并保持(此时PWM信号占空比为1)。运行中若有故障发生程序将自动封锁PWM,并有相应的故障报警与显示。故障或停机时为防止反电势对开关管形成冲击,励磁接触器待开关管完全管断后延时1秒跳闸。
利用西门子S7-224XP自带的高速输入输出口I0.1(或I0.0)可实现PWM输出功能,最高输出频率可达100 kHz。具体对特殊状态寄存器SM77(若选用I0.0则是SM67)配置如图3所示:SM77=16#D3。
SM77配置好后,通过对周期控制字SMW78赋值可实现输出PWM周期的控制,赋值量以SM77.3中所配置的时基为单位(微秒或毫秒)。PWM占空比由寄存器SMW80控制,通过直接赋值或调用函数的方式可实现对占空比变化的控制。如图6所示,在本软启动器中SM77=16#D3,周期SMW78=1000us(开关频率1kHz),占空比通过寻址VW4003值而改变,PLS为启动PWM动作。
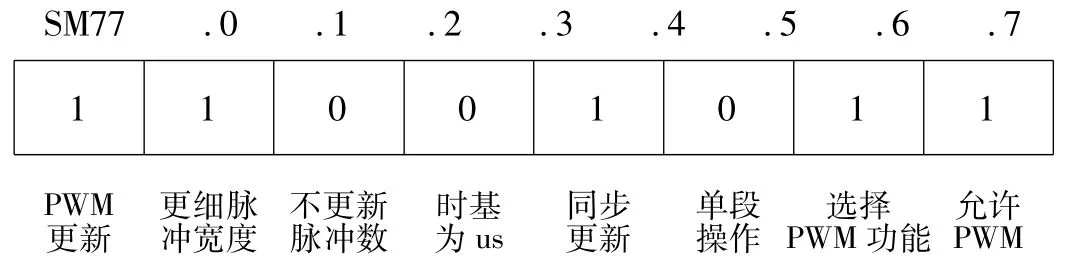
图3 特殊状态寄存器SM77配置
若采用直接赋值的方法对PWM占空比进行控制则占空比将一直保持一个常数而不能变化,不能满足我们的输出要求。因此程序中通过组建函数并调用的方法可实现对PWM占空比的任意变化控制。本设计中以二次函数y=ax2+bx+c(a>0,c>0)为基础,通过对各项系数的调整来观察输出的变化与各项系数间的关系,从而得到最优控制函数。PWM占空比变化如图5所示。二次函数编程如图7所示。
软启动器的设计目标是尽量减小冲击电流同时缩短启动时间。启动时间按4 s进行估算,同时考虑PLC程序的扫描时间对控制产生的延时影响,初步可取二次函数为y=2x2+24x+40,即x=16.7时y=1000。实验中可通过调整系数来观察对输出的影响。
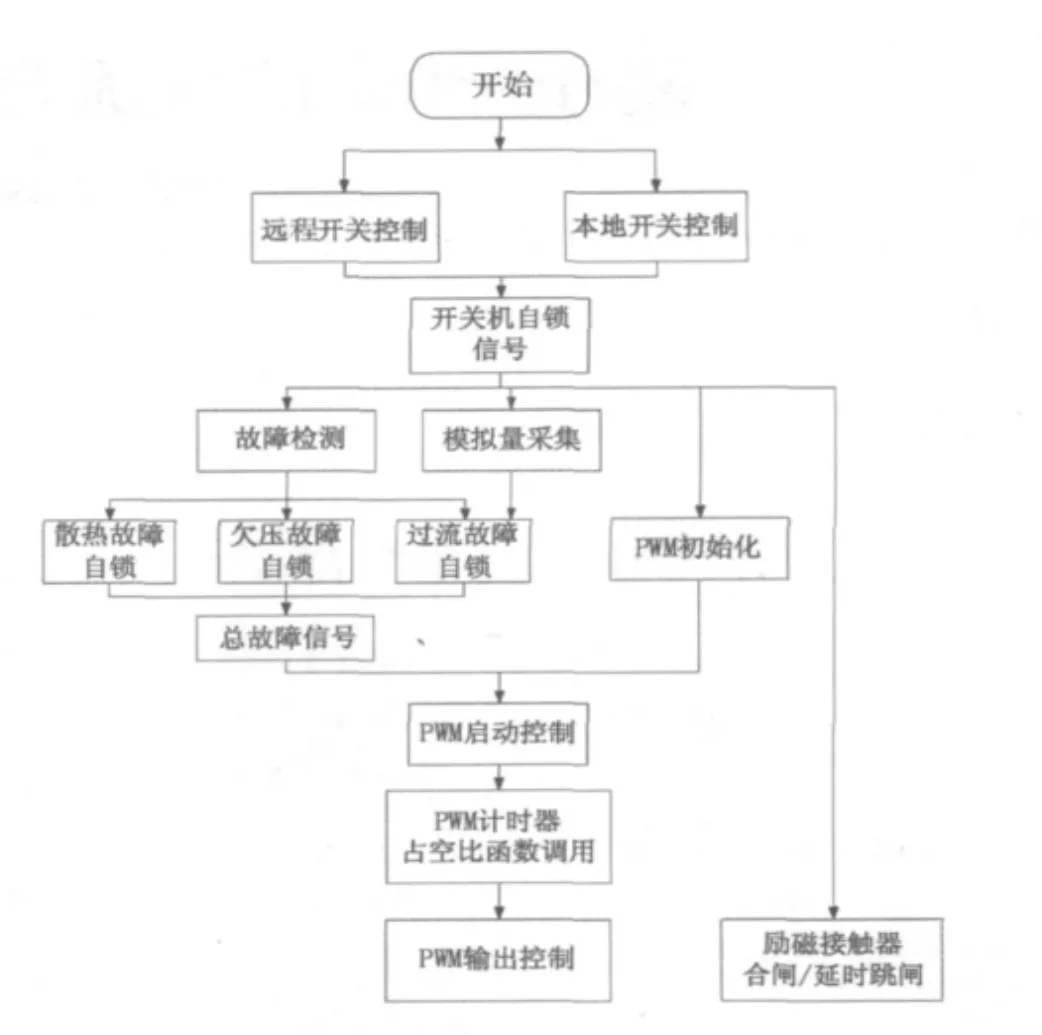
图4 PLC逻辑控制图
2.3 驱动电路
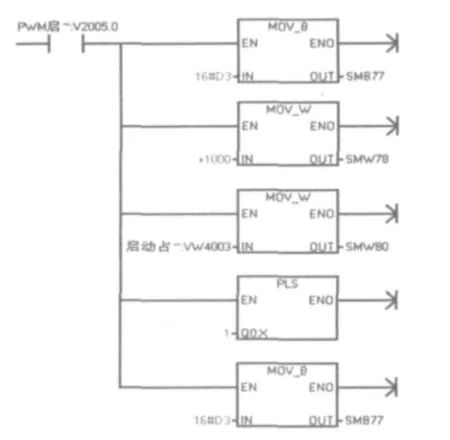
图5PWM功能配置
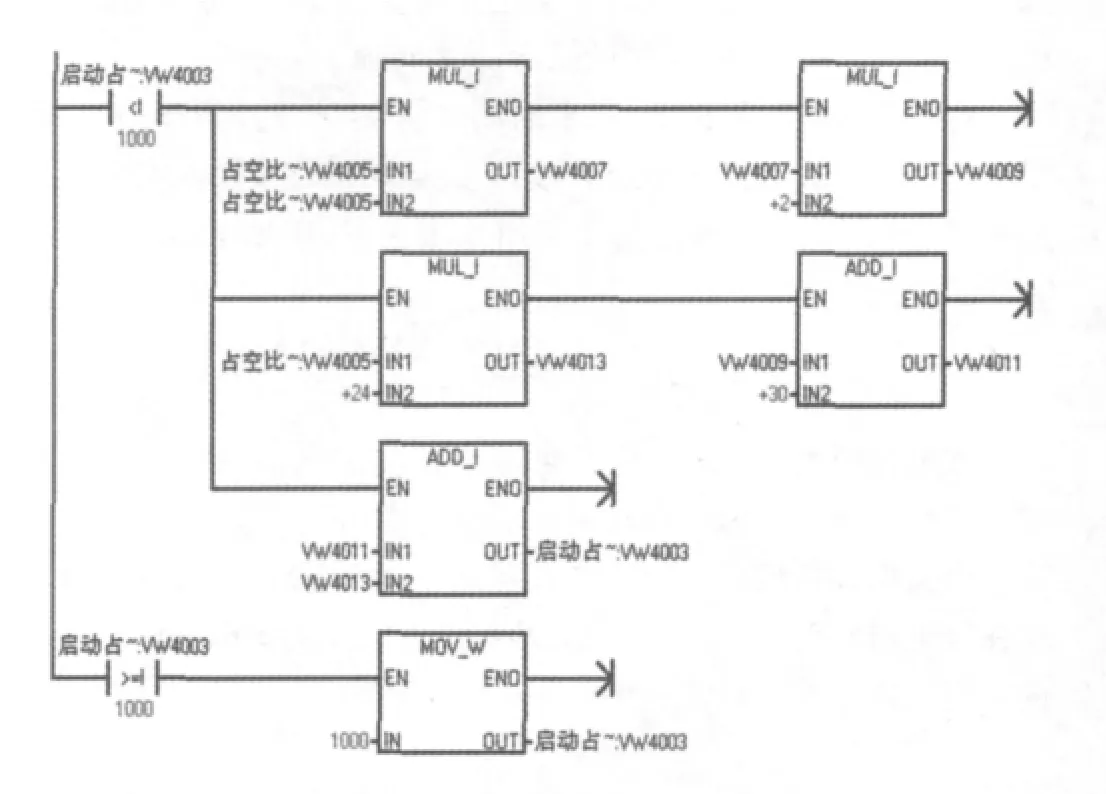
图6 二次函数定义
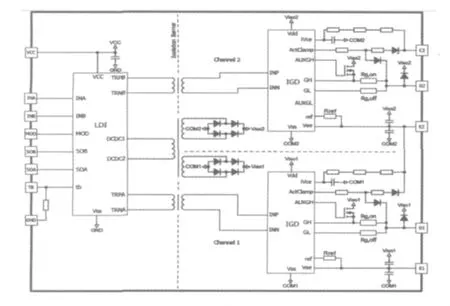
图7 驱动电路内部框图
驱动电路采用CONCEPT公司的2SP0115T系列驱动模块,2SP0115T装备了CONCEPT公司最新的SCALE-2芯片组,这是一款低成本的驱动核。SCALE-2芯片组是一套专门针对驱动器应用的专用集成电路,它包含了大部分的智能驱动器所需要的功能。实际使用时通过给定电源和驱动脉冲信号便可自动控制IGBT的开通与关断,同时应用驱动模块自带的欠压、短路保护可实现对IGBT的有效保护。在本软启动器中,通过PLC控制器产生封锁脉冲将channel 1一直封锁,只利用channel 2对BUCK电路中的IGBT进行PWM控制。具体内部框图如图7所示。
3 实验结果
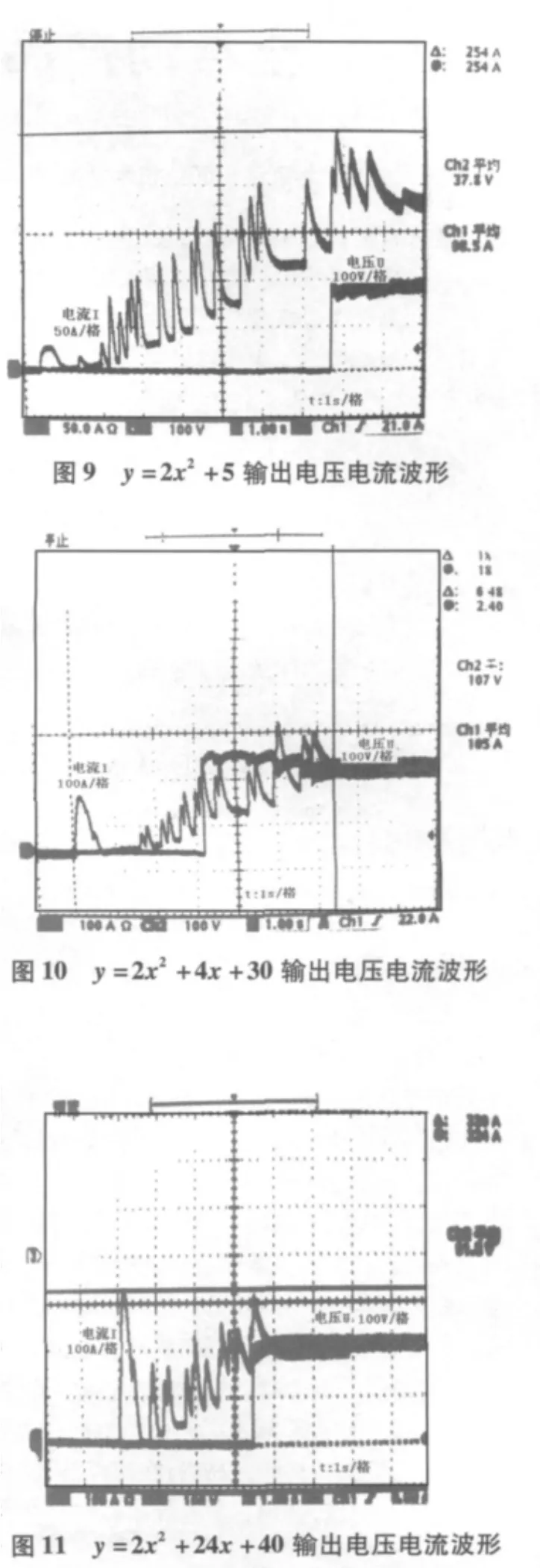
实验输入DC220V,输出接直流电动机负载,开关频率1kHz。电动机参数如表1所示。实验时,通过改变二次函数各项系数得到输出电流I波形与输出电压波形。图8为PWM占空比控制曲线为y=0.33x2+5时输出电压电流波形;图9为PWM占空比控制曲线为y=2x2+5时输出电压电流波形;图10为PWM占空比控制曲线为y=2x2+4x+30时输出电压电流波形;图11为PWM占空比控制曲线为y=2x2+24x+40时输出电压电流波形。

表1 负载直流电动机参数
由以上波形可分析出以下结果
(1)常数项c与启动冲击电流的关系。对比上面四个波形可以看出,在额定输出电流为180 A时,启动冲击电流依次为30 A、30 A、140 A、330 A,因此二次函数的常数项c越大,启动时的冲击电流越大。这是由于启动瞬间电动机还未启动,还未建立反电动势Ea,相当于二次函数常数项对应的启动电压直接加在了电枢上,所以常数项c决定了启动冲击电流的大小。
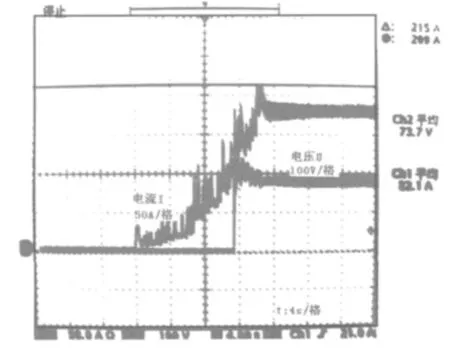
图8 y=0.33x2+5输出电压电流波形
(2)a、b与启动时间的关系。对比图9和图10,它们的启动时间分别为16 s和9 s,通过分析二次函数的特性可知,二次项系数越大,二次函数的值变化幅度越大,由于PLC采用循环扫描的方式执行程序,变化幅度大就意味着每周期增加的占空比值就大,因此图10的电流在启动增加时震荡较大而启动时间较短;图 11和图 12的启动时间分别为6 s 和 4 s,因为常数项对启动瞬间的冲击电流影响较大,而对于启动过程中的影响并不明显,所以对比上述两图可知,一次项系数对于启动时间影响很大,一次项系数越大,启动时间越短。
4 结束语
本文分析了直流电动机启动冲击电流形成的原因,在此基础上设计了一种由PLC控制器产生PWM信号的直流电动机软启动器。通过分析和实验,推导出了本设计中的最优控制曲线(y=2x2+24x+40),在保证启动时间的前提下满足了启动冲击电流小于两倍额定电流的要求,实现了电动机的平滑软启动。本设计对于各种直流电动机拖动场合具有良好的应用前景。
[1]刘慧娟,张威.电机学与电力拖动基础[M].北京:国防工业出版社,2007:39 -42,201 -203.
[2] A.E.Fitzgerald,Charles Kingsley Jr,Stephen D.Umans(刘新正等译)[M].北京:电子工业出版社,2004:270-275.
[3]赵俊生,樊文欣,等.电机与电气控制及PLC[M].北京:电子工业出版社,2009:66-69.
[4] 周顺荣.电机学[M].北京:科学出版社,2002:301-303,323-328.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23 00:33:39
火力与指挥控制(2022年5期)2022-07-25 03:50:10
北京第二外国语学院学报(2021年2期)2021-08-13 08:34:34
中国特种设备安全(2021年9期)2021-03-02 05:40:46
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
测控技术(2018年2期)2018-12-09 09:00:46
通信电源技术(2016年3期)2016-03-26 07:13:14
防灾减灾学报(2015年3期)2015-12-16 16:15:40
共产党员(辽宁)(2015年6期)2015-06-07 02:08:50