
基于CPG神经网络的扑翼型UUV运动控制方法
2011-09-19 01:08刘明雍梁庆卫
水下无人系统学报 2011年6期
沈 超, 刘明雍, 梁庆卫
基于CPG神经网络的扑翼型UUV运动控制方法
沈 超, 刘明雍, 梁庆卫
(西北工业大学航海学院, 陕西西安, 710072)
中枢模式发生器(CPG)是一种普遍存在于脊椎动物中, 用来自激产生节律运动的低级神经中枢。传统的基于模型的机器人控制方法存在建模复杂、解不唯一、单周期规划等问题, 特别是在需要多自由度协调控制的任务中, 缺乏足够的实时性。由于CPG 在协调多自由度运动方面的优越性, 本文研究了扑翼对UUV运动的影响, 并基于CPG模型给出一种运动控制方法。利用反馈信息产生节律信号控制UUV左右扑翼的运动模式; 调整CPG模型参数、反馈输入与CPG输出之间的关系, 设计了UUV直游和转弯的反馈控制律。仿真结果验证了该控制方法的有效性。
无人水下航行器; 中枢模式发生器; 扑翼航行器; 反馈控制
0 引言
水生动物经过上亿年的演变和进化, 在优胜劣汰中将其在水中的运动能力发挥到了极致。其中鱼类和鲸类等哺乳动物游动方式具有高速、高效、灵活且低噪等特点, 其游动和控制姿态的能力是任何目前装备传统的操纵与推进系统的潜航器所无法比拟的。近年来水下仿生机器人技术已经成为水下机器人的重要研究方向之一, 其中仿生扑翼型无人水下航行器(unmanned undersea vehicles, UUV)成为世界各国研究的热点。
1994年, 为了研究鱼类如何在水中以阻力最小的方式游动, 麻省理工学院制造了世界上第1条仿生鱼RoboTuna。从此之后, 针对水下仿生机器人的研究便一发不可收拾。从美国Draper实验室的VCUUV, 到日本东京工业大学的机器海豚, 从美国东北大学的仿鳗鱼机器人, 到哈尔滨工程大学的“仿生-I”, 这些都为人类模仿水生动物, 制造仿生推进方式的水下无人潜航器作出了可行性验证。
与此同时, Wilson发现神经模式发生网络以及20世纪80年代中枢模式发生器(central pattern generator, CPG)建模和特性研究在足类机器人运动控制与研究方面的成功运用, 为仿生扑翼型UUV的节律运动控制建模提供了很好的借鉴。
传统的机器人控制方法基于其精确的动力学模型, 由于建模复杂、解不唯一、需要单周期规划等缺点, 使得越来越多的学者开始研究新型的机器人运动控制方法。其中, CPG 神经网络在机器人需要多自由度协调控制的任务中显现出了巨大的优越性, 开始成为多关节机器人运动控制的新宠。本文考虑了单自由度扑翼UUV的运动规律, 采用3个Kimura振荡器模型, 建立带反馈信号的CPG神经网络控制模型。仿真中, 通过对CPG模型参数的调节, 实现了扑翼UUV的直游和转弯运动。
1 数学模型
1.1 扑翼UUV总体结构
本文所研究的扑翼UUV总体结构如图1所示, 由机身、翼板和尾舵组成。机身内部包括以下几个功能模块: 主体模块(包括壳体及其附件), 动力推进模块, 控制与通信模块。
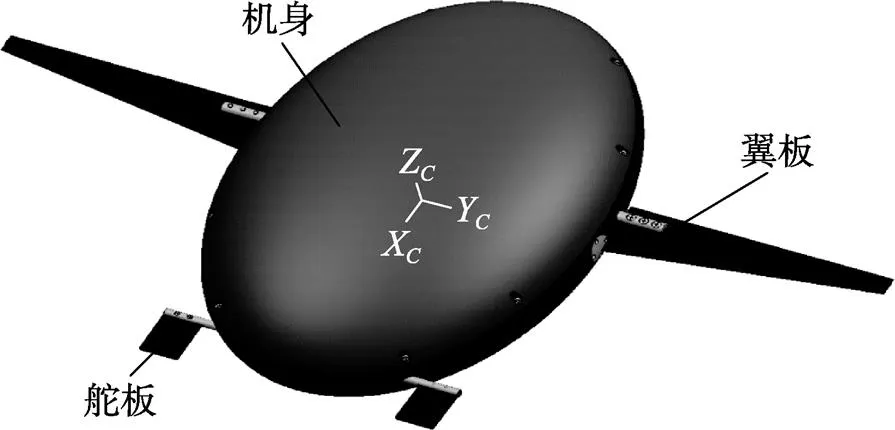
图1 扑翼型无人水下航行器(UUV)总体结构
该扑翼UUV采用单自由度仿生扑翼驱动装置作为UUV运动的唯一动力源, 航行器左右各安装一组单自由度扑翼驱动装置。电机组件依靠电池为其提供能源, 驱动减速器通过联轴器将转动传递给翼轴带动扑翼摆动。根据海龟翼和身体的尺寸比例, 扑翼滑翔UUV将翼展长度设计为310 mm, 根部弦长70 mm, 其根部与尾部弦长比3:1。为了更加方便地控制航行器的升潜以及改变俯仰角等的纵向运动, 也为了提高UUV运动的稳定性, 在其尾部还布置了水平舵来控制航行器的升潜运动。
1.2 翼面受力分析
Anderson等对2D具有大的展弦比扑翼摆动的研究表明, 在形成逆卡门涡街时每个周期产生2个涡是最佳的运动形式。通过研究可以将扑翼驱动力机理简要归纳为, 扑翼扑动运动时在周围产生的前缘涡、后缘涡组成逆卡门涡街, 而且二者相互作用, 为扑翼驱动提供推力。
本文中节律摆动的扑翼被对称地安装在航行器的两侧, 每个扑翼由1个独立的电机驱动, 研究表明, 航行器由扑翼推进时, 其运动力与力矩的表达式为

(2)
式中:是瞬时攻角;和c是攻角每变化1°时相关的力系数与力矩系数;是航行器产生的俯仰力作用点到过质心转动轴的距离;为扑翼的长度;是航行器相对于流体的速度;表征俯仰力矩;是扑翼摆动距离。且
式中:()为瞬时俯仰角;为初始相位;和分别表示扑翼摆动幅值和俯仰角振荡幅值;是振荡频率。另外, 扑翼产生的力在水平方向的分量为
(4)
由式(1)~式(4)可以确定UUV在仅由扑翼作为动力的情况下的推力情况。
2 CPG神经网络模型
节律运动(rhythmic movement)是高等动物中最常见的运动方式之一。一切具有时间和空间对称性的周期性运动都属于节律运动, 如走、跑、跳、泳、飞等。节律运动不是大脑的刻意控制行为, 而是低级神经中枢的自激行为, 参见图2。位于脊髓中的CPG自动产生节律运动并控制改变不同的运动模式。
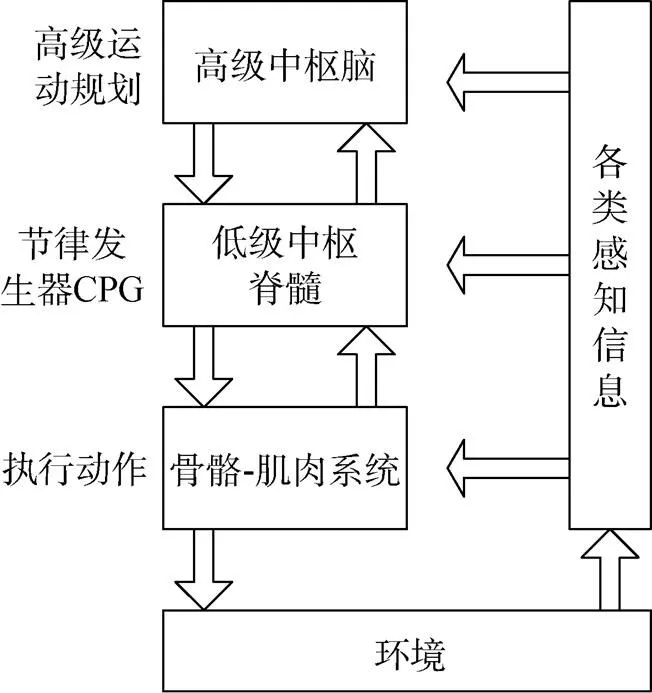
图2 脊椎动物神经控制结构图
UUV扑翼的运动模仿鱼类胸鳍运动模式, 可以视为典型的节律运动, 通过控制扑翼的摆动频率、攻角来实现推进和各种机动动作。因此, 文中将CPG模型应用到扑翼UUV的运动控制上, 利用CPG模型实现对左右两翼的节律运动控制。
利用CPG模型的最大优势在于给予常数输入信号能得到有一定频率的节律输出信号y。本文采用Kimura振荡器模型, 参见图3。
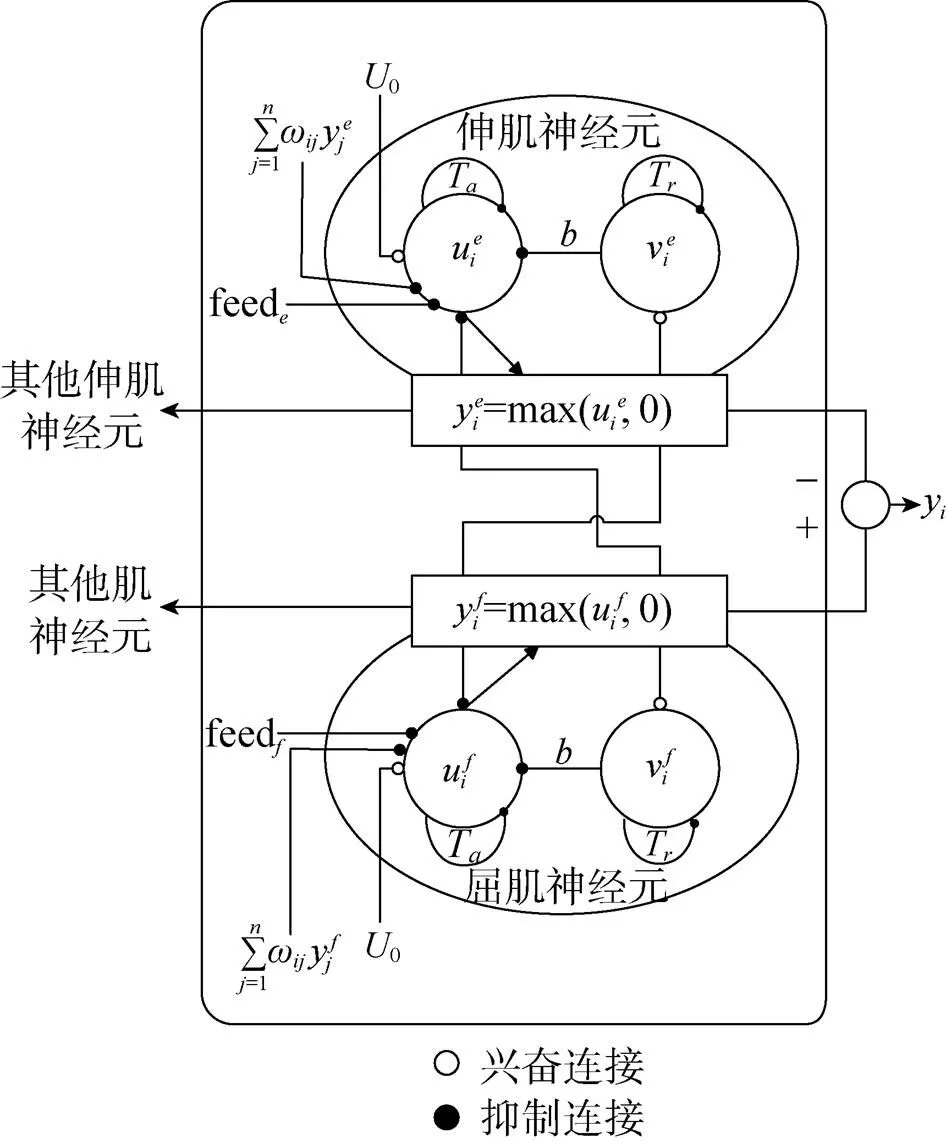
图3 Kimura的中枢模式发生器(CPG)神经元模型
该模型是在Matsuoka模型的基础上进行改进, 该振荡器模型采用2个神经元相互抑制形成振荡器, 2个神经元分别对应动物的屈肌和伸肌控制神经元, 2个神经元的输出相减, 作为振荡器的输出。
本文采用3个Kimura振荡神经元组成扑翼UUV的CPG控制模型, 如图4所示。其中表示左翼神经元,F表示右翼神经元,表示尾舵神经元, 每个神经元都接收反馈输入信号, 且每两个神经元都相互连接相互抑制。这里, 把模型中神经元输出的膜电势信号y视为扑翼驱动电机的输入电压。
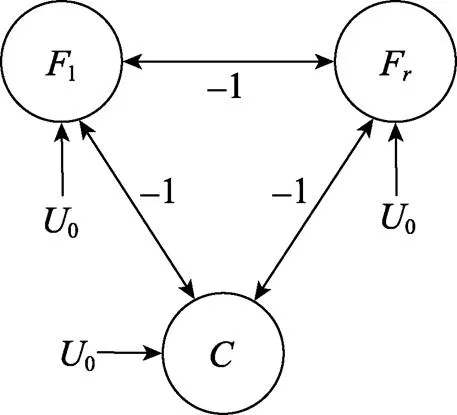
图4 扑翼UUV的CPG神经网络
上图中的CPG模型采用Kimura振荡器的数学表达式
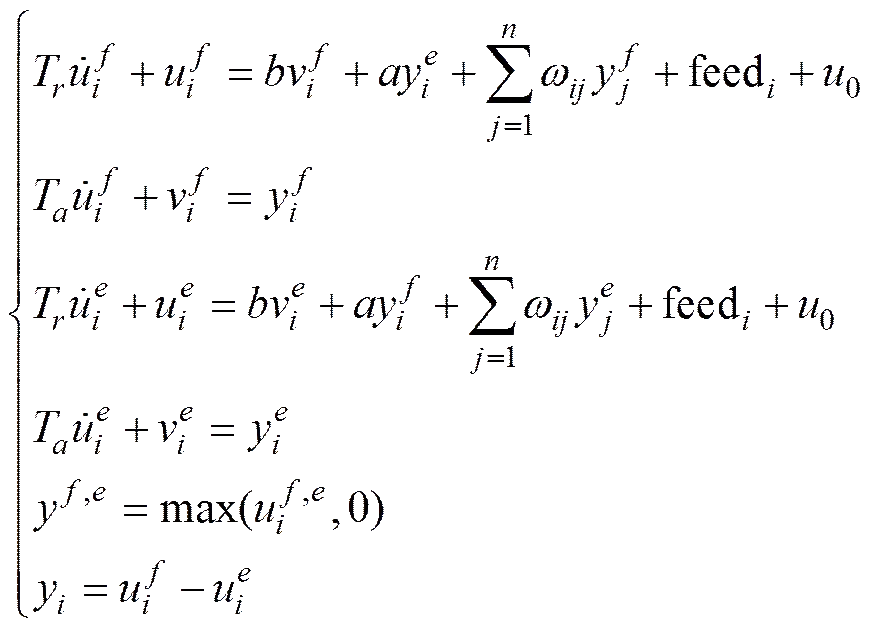
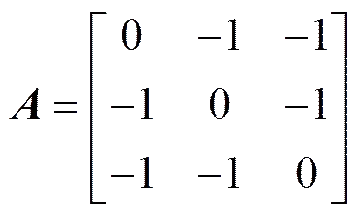
式中:=1, 2, 3代表左右扑翼和尾舵神经元;,分别代表第个振荡器的屈肌、伸肌神经元;u为神经元的内部状态;v为神经元的自抑制;为外部常数输入; feed为外部反馈输入;代表白抑制对细胞内部状态的影响程度;T和T为时间常数;=(1(≠), 0(=))为第和个振荡器之间的连接权重。
该CPG模型与输出间的关系有以下特性:1) 神经元膜电势输出y的频率取决于参数T与T。保证T和T保持一定的比例, 能使输出信号的幅值保持恒定。利用这个特性可以控制UUV扑翼的拍动频率及幅值大小。2) 改变参数feed能控制CPG输出的平衡态位置, 在本文扑翼UUV模型中, 可以控制UUV扑翼拍动轴与来流的夹角, 实现其简单的俯仰运动。3) 当feed超过某一临界值时, 第个神经元会停止振荡。在控制UUV的转弯时, 可采用此策略。
3 仿真试验
利用Matlab对在理想静水条件下的扑翼UUV的CPG神经网络控制方法进行仿真分析。
3.1 直游
在理想静水条件下, UUV要保持直游, 需具备以下条件: 1) 左、右扑翼保持相同的频率摆动; 2) 左、右扑翼应具有相同的摆动相位初始值; 3) 左、右扑翼保持相同振幅摆动; 4) 左、右扑翼具有相同的初始位置偏移角。图5为扑翼UUV直游时两翼的电机输入电压, 可看出, 左右扑翼基本满足静水中航行器直行的4个条件, 能够进行直游运动。表1为UUV直游时CPG网络参数。
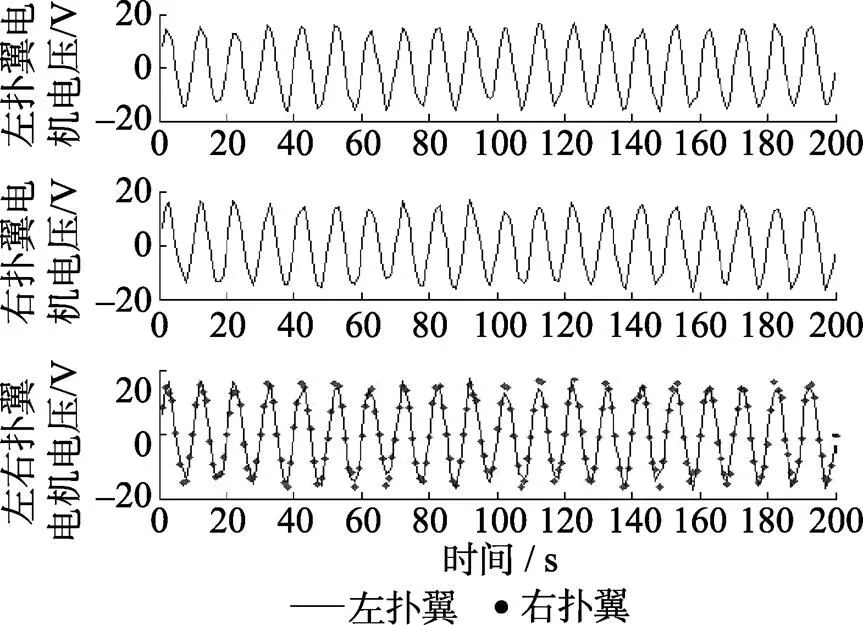
图5 扑翼UUV直游时两翼的电机输入电压

表1 UUV直游时CPG网络参数
(7)
3.2 转弯
UUV左转弯时, 调整feed参数大小, 使左扑翼神经元停止振荡, 而右扑翼神经元正常输出振荡膜电势。这样左扑翼驱动电机停止转动, 右扑翼继续保持拍动状态, UUV就会向左转弯。
图6为扑翼UUV左转弯时两翼的电机输入电压。可看出, 左边扑翼振幅很小, 几近停止振荡, 而右边扑翼保持与直游时同等幅度的输出。这样, 在静水条件下, 能使UUV产生左转弯行为。表2表示UUV左转弯时CPG的网络参数。
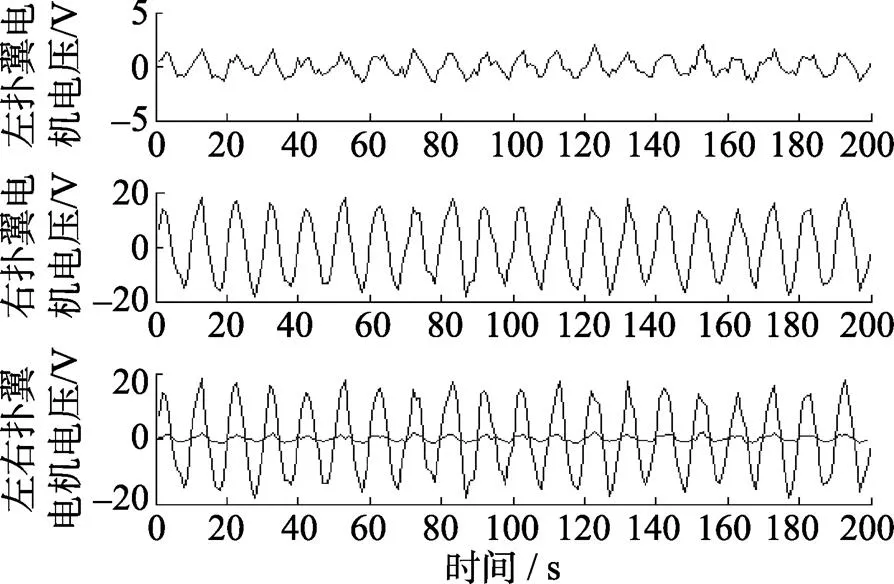
图6 扑翼UUV左转弯时两翼的电机输入电压

表2 UUV左转弯时CPG网络参数

UUV右转弯时, 调整feed参数大小, 使右扑翼神经元停止振荡, 而左扑翼神经元正常输出振荡膜电势。这样右扑翼驱动电机停止转动, 左扑翼继续保持拍动状态, UUV就会向右转弯。图7表示扑翼UUV右转弯时两翼的电机输入电压。表3为UUV右转弯时的CPG网络参数。
图7 扑翼UUV右转弯时两翼的电机输入电压
Fig.7 Motor input voltage for both wings when a flapping-wing UUV is turning right

表3 UUV右转弯时CPG网络参数

从图7可以看到, 右边扑翼振幅很小几近停止振荡, 而左边扑翼保持与直游时同等幅度的输出。能够使UUV产生右转弯行为。

仿真表明, 采用Kimura振荡神经元组成的CPG控制模型能够通过参数调整实现扑翼UUV的直行与转弯运动。
4 结束语
本文将CPG神经网络建模应用于对水下扑翼型UUV的运动控制之中, 和传统的基于航行器动力学模型的控制算法相比, CPG神经网络算法能有效避免复杂的运动学、动力学建模, 并在协调多自由度运动方面存在着巨大的优越性。
仿真结果表明, 通过模拟生物CPG网络中相互抑制输出的神经元, 能有效地产生扑翼驱动电机的输入电压, 从而控制扑翼的运动模式, 对扑翼UUV进行简单的运动控制。该方法有一定的理论和工程实用价值, 有望为水下仿生机器人的运动建模与控制方面提供理论研究。另外, 基于CPG所擅长的协调多自由度运动的能力, 可以在后续工作中考虑二自由度的仿生扑翼对UUV运动的影响并利用CPG神经网络进行简单的运动控制, 以及多关节可摆动鱼身的仿生机器鱼方面的研究。
[1] Michael S, Triantafyllou, George S, et al. An Efficient Swim- ming Machine[J]. Scientific American, 1995, 272 (3): 64-70.
[2] Anderson J M, Kerrebrock P A. The Vorticity Control Un- manned Undersea Vehicle(VCUUV)——An Autonomous Vehicle Employing Fish Swimming Propulsion and Man- euvering[C]//10th International Symposium, Unmanned Un- tethered Submersible Technology, Durham NH, 1997:189- 195.
[3] Nakashima M, Ono K. Experimental Study of Two-joint Dolphin Robot[C]//Papers of 11International symposium on UUS technology, 1999: 211-218.
[4] Mclsaac K A, Strowski J P. A Geometric Approach to An- guilliform Locomotion: Mdelling of an Underwater Eel Robot[C]//Proceedings of the 1999 IEEE International Con- ference on Robotics and Automation, 1999: 2843-2848.
[5] 成巍, 苏玉民, 秦再白, 等. 一种仿生水下机器人的研究进展[J]. 船舶工程, 2004, 26(1): 5-8.
Cheng Wei, Su Yu-min, Qin Zai-bai, et al. Development of a Bionic Underwater Vehicle[J]. Ship Engineering, 2004, 26 (1) :5-8.
[6] Wilson D M. The Central Nervous Control of Flight in a Locust[J]. Journal of Experimental Biology, 1961, 38(2): 471 -479.
[7] Ambarish G, Benoit T, Bernard E. A Study of the Passive Gait of a Compass-like Biped Robot: Symmetry and Chaos[J]. International Journal of Robotics Research, 1998, 17(12): 1282-1301.
[8] Kiyotoshi M. Mechanisms of Frequency and Pattern Control in the Neural Rhythm Generators[J]. Biological Cybernetics, 1987, 56(5): 345-353.
[9] Gentaro T. A Model of the Neuro-musculo-skeletal System for Human Locomotion(I. Emergence of basic gait)[J]. Biolo- gical Cybernetics, 1995, 73(2): 97-111.
[10] Hase K, Yamazaki N. Synthesis of Bipedal Motion Resem- bling Actual Human Walking by Neural Oscillators and Genetic Algorithms[J]. Transactions Society of Instrument and Control Engineering, 1997, 33(5): 448-454.
[11] Fukuoka Y, Kimura H, Hada Y, et al. Adaptive Dynamic Walking of a Quadruped Robot on Irregular Terrain Based Biological Concepts[J]. International Journal of Robotics Research, 2003, 22(3/4): 187-202.
[12] Anderson J M, Streitlien K, Barrett D S, et al. Triantafyllou“Oscillating Foils of High Propulsive Efficiency” [C]// Fluid Mechanics, 1998, 360: 41-72.
[13] Nilesh B, Sahjendra N S. Output Feedback Modular Ada- ptive Control of a Nonlinear Proto Typical Wing Section [J] . Nonlinear Dynamics, 2004, 37(4): 357-373.
[14] Miyotoshi M. Sustained Oscillations Generated by Mutually Inhibiting Neurons with Adaptation[J]. Biological Cyber- netics, 1987, 52(6): 367-376.
[15] Zhang Xiu-li. Biological-inspired Rhythmic Motion and Environmental Adaptability for Quadruped Robot[D]. Beijing: Tsinghua University, 2004.
(责任编辑: 杨力军)
A CPG-based Method for Motion Control of Flapping-wing UUV
SHEN Chao, LIU Ming-yong, LIANG Qing-wei
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
Traditional methods for robot motion control need complex dynamic and kinematic models, and are lack of real-time especially for the control tasks with multiple degrees of freedom (multi-dof). Central pattern generator (CPG) is good at dealing with multi-dof control tasks. This paper analyzes the flapping-wing’s influence on UUV’s motion, and proposes a CPG-based method for motion control of a flapping-wing UUV. The motion mode of the wings is controlled by using feedback signals, and two control laws for UUV′s straight and turning motions are designed by adjusting the relations among CPG parameters, feedback control input, and CPG output. Simulation result indicates that the CPG-based method is feasible and effective.
unmanned underwater vehicle(UUV); central pattern generator (CPG); flapping-wing vehicle; feedback control
TJ630.33; TJ765.1
A
1673-1948(2011)06-0438-05
2011-07-11;
2011-08-22.
国家自然科学基金(50979093), 新世纪优秀人才计划资助(NCET-06-0877), 西北工业大学基础研究基金(JC200927).
沈 超(1986-), 男, 在读硕士, 主要研究方向为水下导航与控制.
猜你喜欢
作物学报(2022年4期)2022-02-10
疯狂英语·新读写(2021年6期)2021-08-05
空间科学学报(2021年1期)2021-05-22
电子产品世界(2021年8期)2021-01-16
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
创新作文(1-2年级)(2017年7期)2017-12-26
中国疼痛医学杂志(2017年8期)2017-01-11
创新时代(2016年8期)2016-10-21
弹箭与制导学报(2015年1期)2015-03-11
