
头支撑下空化器外形对通气超空泡的影响
2011-09-19 01:07辉1张宇文1袁绪龙1瑞2
水下无人系统学报 2011年6期
弋 辉1, 张宇文1, 袁绪龙1, 王 瑞2
头支撑下空化器外形对通气超空泡的影响
弋 辉, 张宇文, 袁绪龙, 王 瑞
(1. 西北工业大学航海学院, 陕西西安, 710072; 2. 西北机电工程研究所, 陕西咸阳, 712099)
目前, 空化器外形对超空泡形态的影响研究都是在空化器前的流场未被干扰时进行的, 当水洞试验因采用头部支撑方式而影响了空化器前的流场时, 通气超空泡形态随空化器外形的变化规律尚不明确。本文应用计算流体力学(CFD)仿真软件FLUENT, 参照头支撑下通气超空泡生成的试验模型, 建立了随空化器直径、连接杆直径和空化器锥角变化的仿真模型。在通气量一定的情况下, 通气超空泡的长度和长径比随头支撑连接杆的增大而增大, 随空化器直径的增大而减小, 随空化器锥角的减小而增大, 并深入研究了空化器外形对空泡尺寸的影响规律, 为水洞超空泡试验在头支撑方式下空化器外形的设计提供参考。
水洞试验; 头支撑; 空化器; 通气超空泡; 计算流体力学
0 引言
随着超空泡航行体的日益发展和超空泡技术应用领域的扩宽, 在水洞进行着越来越多的超空泡试验。水洞试验模型的支撑方式有头支撑、腹支撑和尾支撑, 为了避免空化器前的流场受到干扰, 超空泡试验一般采用尾支撑方式。然而尾部连接杆的存在会产生导流作用, 干扰模型尾部流场, 所以在研究超空泡尾部形态和航行体尾部流体动力特性的试验中, 模型选用头部支撑方式。国内外学者已经对空化器前无干扰时的超空泡形态、流场分布以及流体动力特性等方面进行了广泛的研究, 然而没有研究在头支撑方式下, 即空化器前有干扰时的空化器外形对超空泡形态的影响规律。
对空化器前存在连接杆时的通气超空泡形态进行理论计算存在较大难度, 这是因为模型加工和安装以及水洞运行需要大量成本和时间, 应用试验的方式来得到影响规律只能达到事倍功半的效果。本文应用CFD仿真软件Fluent6.3建立仿真模型, 模拟空泡在头支撑方式下的形态, 通过对仿真结果的对比分析, 得到泡形随空化器外形的变化规律, 为以后水洞超空泡试验在头支撑方式下空化器外形的设计提供参考。
1 通气超空泡仿真模型的建立
1.1 通气超空泡的生成
物体头部具有扩张锐角的外形, 在扩张外形之后通入气体, 可以形成包围物体的气腔。这种人工通气超空泡生成方法可以生成稳定、光滑的透明空泡表面, 易在较小来流速度下生成超空泡, 被广泛用于试验室超空泡研究。
空泡流的基本相似参数是空化数, 即

式中:为来流压力;p为空泡压力;为液体的密度;为液体的来流速度。超空泡只有在小的空化数下(如≤0.1)才可能产生。
在试验模型采用头支撑方式时, 空化器前的连接杆不影响空化器迎流面压力梯度的形成, 来流依然以一定速度由扩张锐角抛出, 当通入气体时, 形成通气超空泡。空化器的有效空化面积为除去连接杆后的迎流面积, 有效空化器直径, 其中D为空化器直径,D为连接杆直径。因要从连接杆导出信号线和通气管以及保证机械刚度, 连接杆直径不能过小。
通气超空泡研究的主要问题之一, 是确定维持给定空泡尺度所需的气体供给量。通气流量经常表示为无因次流量系数
式中:为通气量;为水流速度。由于水洞试验条件的限制,和存在阀值, 可通过改变空化器外形来达到试验所需的空泡尺度。在模型采用头支撑方式时, 如何通过改变空化器直径和锥度以及连接杆直径来实现目标空泡形态, 本文将对此进行数值模拟研究。
1.2 仿真模型和仿真方法
为研究在头支撑下空化器外形对通气超空泡形态的影响规律, 参照试验室生成通气超空泡的方法和模型建立数值仿真模型。仿真模型在通气降低空化数生成通气超空泡后, 通过改变空化器外形来改变空化数, 而空化数是空泡流的基本相似参数, 从而改变了空泡外形尺寸。
图1为模型网格图, 流场的左边界为水流的速度入口, 右边界为压力出口, 宽1 000 mm, 上下边界为壁面, 宽2 000 mm, 模型长度500 mm, 直径40 mm, 通气孔紧贴空化器背流面, 为气体的质量流量入口。仿真计算设置为2D轴对称模型, 采用非定常计算方法, 计算时间步长大小根据空化器附近最小网格长度和水速来确定, 12 m/s水速时约为3.5×10s。通气量是考虑到水洞试验中质量流量计的测量范围, 通过换算给定的常值Q, 采用无滑移速度的混合物模型, 近壁面采用非平衡壁面方程, 湍流模型设为分散紊流(RNG)模型; 压力速度耦合采用标准的simple算法, 空间离散选用默认的方法, 适当调小松弛因子。
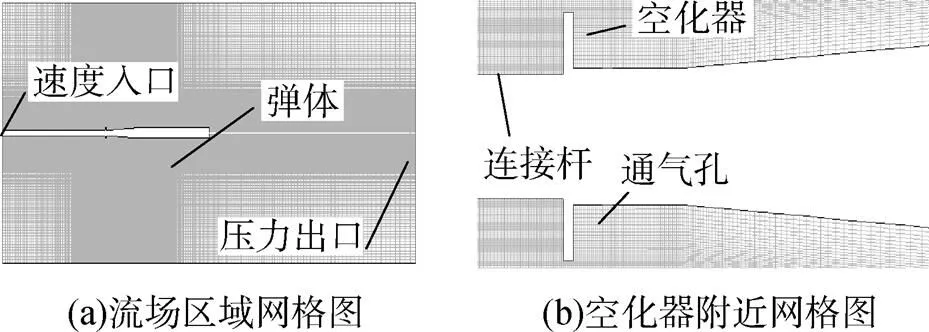
图1 MZ1仿真模型网格图
2 空化器外形对通气超空泡的影响
2.1 仿真条件
依据单因素变量原则将模型细分为以下5组, 名称和参数如表1所示。
系列模型进行数值模拟时流场条件设置为水速12 m/s, 1个大气压, 通气量。

表1 空化器外形参数表
2.2 变连接杆直径的仿真结果
图2为MZ2模型通气超空泡仿真图像, 表2为与之对应的数值结果。可以看出, 减小连接杆直径, 通气超空泡长度变小, 直径变化不明显, 通气空化数和阻力系数增大。因为当连接杆直径变小, 有效空化器直径变大, 通气流量系数减小, 导致通气空化数增大, 空泡变短。
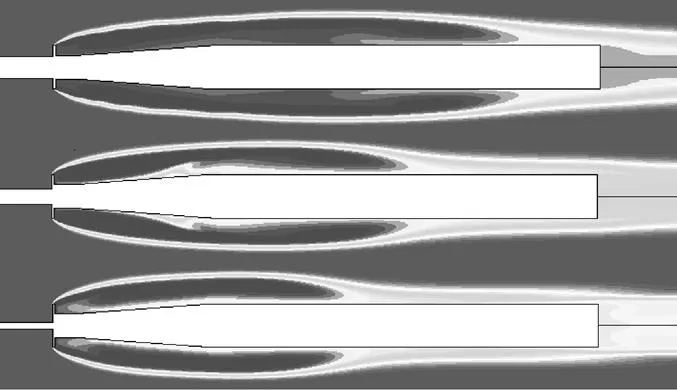
图2 MZ2系列模型仿真结果空泡密度图
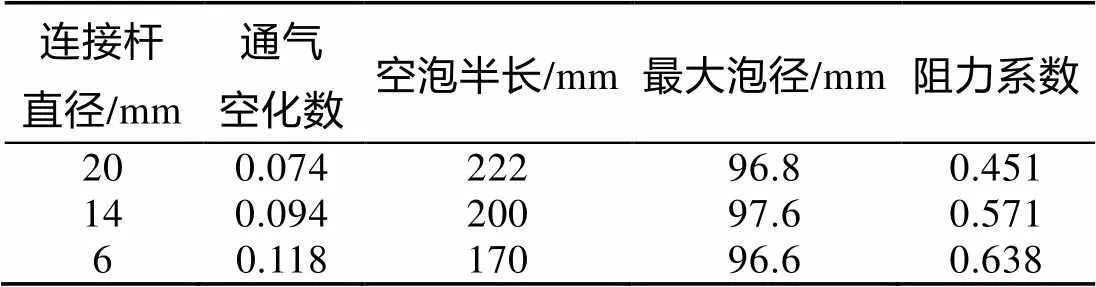
表2 MZ2系列模型仿真结果数值表
由图3和表3关于60°圆锥空化器的仿真结果可以得出相同的结论。并注意到, 在相同有效空化器直径下, 圆锥空化器比圆盘空化器生成的通气超空泡长度较长, 最大空泡直径较小。

图3 MZ3系列模型仿真结果空泡密度图

表3 MZ3系列模型仿真结果数值表
由此可以看出头支撑的优点, 它不仅不会影响通气超空泡的生成, 而且可以获得较大尺寸的通气超空泡。
2.3 变空化器直径仿真结果
图4为MZ1模型通气超空泡仿真图像, 表4为与之对应的数值结果。可知, 在头支撑方式下, 减小圆盘空化器直径可增加空泡长度, 减小最大空泡直径, 明显减小通气空化数和阻力系数。因为当有效空化器直径减小, 通气流量系数增加, 通气空化数减小, 空泡变长, 又由于起始空泡直径变小, 最大空泡直径仍以较小幅度变小。

图4 MZ1系列模型仿真结果密度图

表4 MZ1系列模型仿真结果数值表
由图5和表5关于60°圆锥空化器的仿真结果可以得出相同的结论, 并注意到在空化器有效直径相同时, 圆锥空化器比圆盘空化器生成的通气超空泡长度较长, 最大空泡直径较小。

图5 MZ4系列模型仿真结果空泡密度图
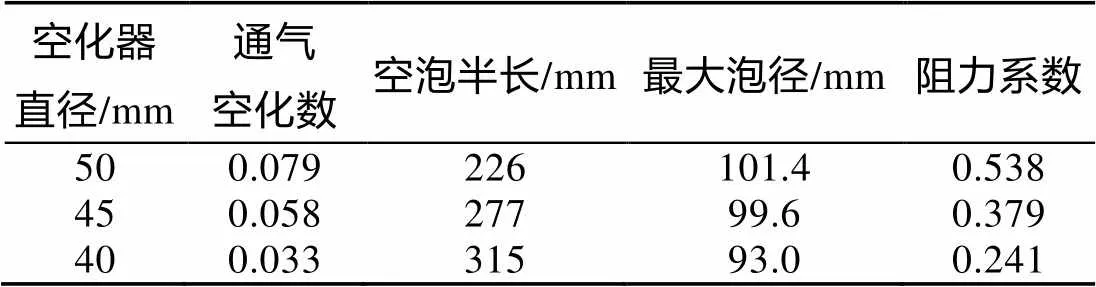
表5 MZ4系列模型仿真结果数值表
2.4 变锥度的仿真结果
图6为MZ5模型通气超空泡仿真图像, 表6为与之对应的数值结果。可以看出, 随着空化器锥度的增大, 阻力系数增大, 通气空化数增大, 空泡长度减小, 最大空泡直径增大。圆盘空化器的锥度可看作是180°, 符合此组模型所得规律。
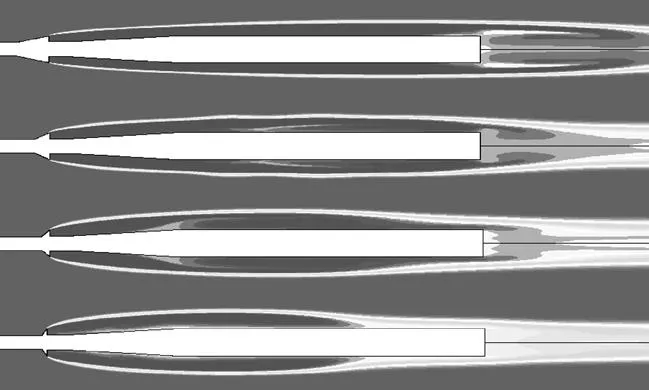
图6 MZ5系列模型仿真结果空泡密度图

表6 MZ5系列模型仿真结果数值表
2.5 变锥度的试验结果
图7(a)为水洞试验射弹模型照片, 左边为需要测量力学特性的射弹尾翼(尾翼图形略去), 通过内置三分力天平与模型前部连接, 水流由右边吹来, 通过50 mm直径圆盘空化器生成通气空泡, 采用翼型导流罩减小支撑杆对空化器周围流场的影响。图7(b)是直径为50 mm的圆锥空化器试验模型。
图8(a)是50 mm圆盘空化器模型在水速为12 m/s、工作段压力为0.8个大气压和200SLPM通气流量下某时刻的空泡图像。试验中空泡波动较大, 没能生成形态稳定光滑透明的通气超空泡。
图8(b)是50 mm圆锥空化器在相同试验条件下生成的通气超空泡, 空泡稳定且光滑透明。

图7 水洞试验模型照片
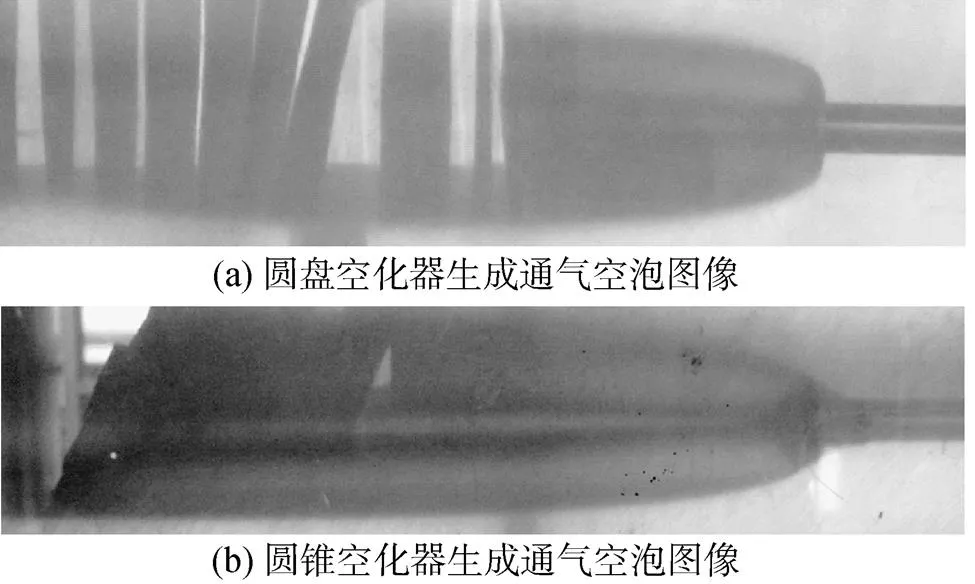
图8 水洞试验瞬时空泡图像
由此可见, 连接杆并不影响通气超空泡的生成, 空化器外形对通气超空泡影响显著。数值模拟通气超空泡所得仿真图像和试验图像吻合较好。
3 仿真结果与分析
3.1 空泡形态和通气空化数的关系
空泡长径比为空泡半长的2倍和最大空泡直径的比。图9给出了5组模型的空泡长径比随空化数的变化关系, 并给出自然超空泡理论长径比变化曲线。可以看出, 5组模型仿真计算所得长径比随空化数的增大有规律地减小, 变化趋势与理论计算长径比吻合很好, 具体数值偏小。
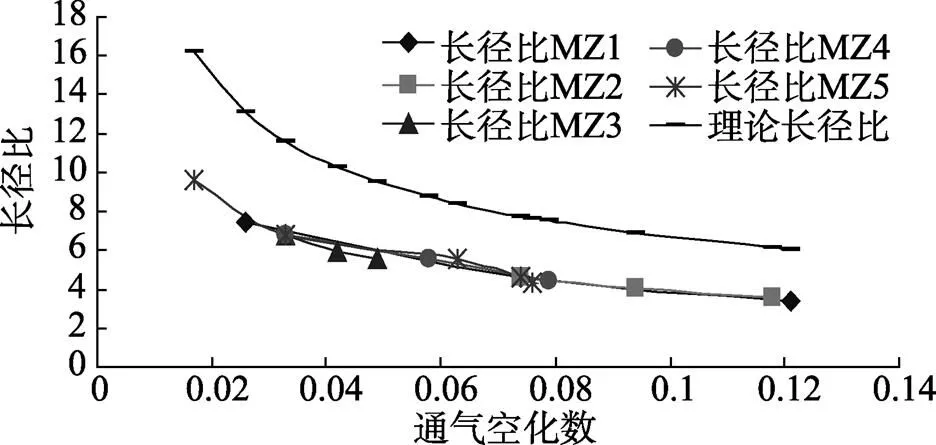
图9 空泡长径比随通气空化数的变化曲线
3.2 通气空化数与空化器外形的关系
由图10可以看出, 在其他条件相同的情况下, 通气空化数和空化器阻力系数基本成线形关系。通过改变空化器的外形和来流对空化器的作用力, 可以有效改变通气空化数。
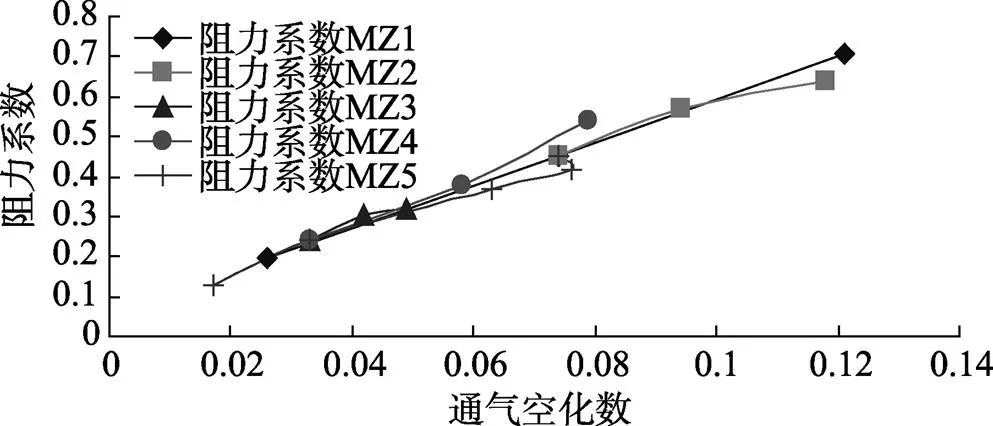
图10 空化器阻力系数和空化数的关系曲线
减小有效空化器直径或空化器锥角, 都能有效减小空化器阻力系数, 随之减小通气空化数。
图11反映了通气空化数随空化器外形的变化规律, 当增大有效空化直径, 通气空化数增大。当减小空化器锥角, 通气空化数随之减小。

图11 通气空化数随空化器外形的变化曲线
依据以上的分析, 在头支撑方式下通过设计空化器外形, 可以得到需要的空泡尺寸, 完成对射弹尾翼不同高度穿刺的试验。
4 结论
为了减小完成试验任务的成本和周期, 通过数值模拟, 研究了在头支撑下不同空化器外形对通气超空泡的影响规律。对水洞超空泡试验的模型设计具有参考价值, 以便在受限的试验条件下得到需要的空泡尺寸。通过仿真得到如下规律:
1) 头支撑连接杆对空化器前流场的干扰影响通气超空泡的尺寸, 但不影响通气超空泡的生成;
2) 空化器外形不影响通气超空泡长径比随通气空化数变化的规律, 但在其他条件相同的情况下, 影响通气空化数;
3) 只增大空化器直径或只减小连接杆直径, 有效空化器直径增大, 圆盘和圆锥空化器的阻力系数增大, 通气空化数增大, 空泡长度减小;
4) 只增大空化器锥度, 空化器的阻力系数增大, 通气空化数增大, 空泡长度减小。
[1] 范增辉, 于开平, 张嘉钟, 等. 超空泡航行体尾部流体动力特性试验研究[J]. 工程力学, 2008, 25(3): 26-30. Fan Zeng-hui, Yu Kai-ping, Zhang Jia-zhong, et al. Experi- mental Research on Hydrodynamic Character of AFT Section of Underwater Supercavitating Bodies[J]. Engineering Me- chanics, 2008, 25(3): 26-30.
[2] 刘宏, 诸学森, 王志. 头支撑方式下通气超空泡形态相似与空化器设计研究[J]. 船舶力学, 2009, 13(5): 677-681. Liu Hong, Zhu Xue-sen, Wang Zhi. Study of Similarity of Cavity Shape in Ventilation Supercavitating Experiment with Strutting at Nose Section and Cavitator Designing[J]. Journal of Ship Mechanics, 2009, 13(5): 677-681.
[3] 范增辉, 于开平, 张嘉钟, 等. 超空泡航行体尾部流体动力特性试验模型支撑方式的选择研究[J]. 机械科学与技术, 2007, 26(12): 1648-1651. Fan Zeng-hui, Yu Kai-ping, Zhang Jia-zhong, et al. Selecting the Strutting Position for Models of Experiments on Hydro- dynamic Characteristics of the AFT Section of an Underwater Supercavitating Vehicle[J]. Mechanical Science and Techno- logy for Aerospace Engineering, 2007, 26(12): 1648-1651.
[4] 刘统军, 罗凯, 胥银. 尾部喷流对超空泡流动影响试验技术研究[J]. 鱼雷技术, 2009, 17(5): 63-66. Liu Tong-jun, Luo Kai, Xu Yin. Experimental Technology for Investigating Tail Jet Influence on Supercavitation Flow[J]. Torpedo Technology, 2009, 17 (5): 63-66.
[5] 袁绪龙, 张宇文. 高速超空化航行体典型空化器多相流CFD分析[J]. 弹箭与制导学报, 2005, 25(1): 53-59. Yuan Xu-long, Zhang Yu-wen. Multi-phase CFD Analysis of Typical Cavitator for High-Speed Supercavitating Under- water Vehicle[J]. Journal of Projectiles, Rockets Missiles and Guidance, 2005, 25 (1): 53-59.
[6] 张学伟, 魏英杰, 张嘉钟, 等. 模型结构对通气超空泡影响的试验研究[J]. 工程力学, 2008, 25(9): 203-208. Zhang Xue-wei, Wei Ying-jie, Zhang Jia-zhong, et al. Experi- mental Research on the Effect of Model Structure on Venti- lated Supercavity[J]. Engineering Mechanics, 2008, 25(9): 203-208.
[7] Savchenko Y N. Investigation of High-speed Supercavitating Underwater Motion of Bodies[C]//Proceedings of NATO- AGARD. Ukraine: NAS-IHM, 1997.
[8] Logvinovich G V. Hydrodynamics of Flow with Free Boun- daries[M]. Kiev: Naukova Dumka, 1969.
[9] Savchenko Y N. Supercavitation-problems and Perspectives [C]//4th International Symposium on Cavitation. California: California Institute of Technology, 2001.
(责任编辑: 陈 曦)
Influence of Cavitator Shape on Ventilated Supercavitation in Head Support Mode
YI Hui, ZHANG Yu-wen, YUAN Xu-long, WANG Rui
(1. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China; 2. Northwest Institute of Mechanical and Electrical Engineering, Xianyang 712099, China)
The research on the influence of cavitator shape on supercavitation is usually conducted in the condition where the front flow of cavitator is not disturbed. However, when the front flow of cavitator is influenced by using of head support mode in water tunnel test, the changing law of ventilated supercavitation with the shape of cavitator is not clear. In this study, a series of simulation models in accordance with the experimental ones are built by means of the computational fluid dynamics (CFD) simulation software FLUENT. These models depend on the diameter of cavitator, the diameter of the connecting rod, and the cone angle of the cavitator. Simulation indicates that under certain ventilation, the length and the length to diameter ratio of the ventilated supercavitation increase with the diameter of connecting rod increasing, decrease with the diameter of cavitator increasing, or increase with the cone angle of cavitator decreasing. Moreover, the influencing laws of the cavitator shape on ventilated supercavitation are also investigated. This study may facilitate the design of cavitator shape for the water tunnel test of supercavitation in head support mode.
water tunnel test; head support mode; cavitator; ventilated supercavitation;computational fluid dynamics(CFD)
TJ630.1
A
1673-1948(2011)06-0406-05
2011-05-18;
2011-06-01.
弋 辉(1987-), 男, 在读硕士, 主要研究水中兵器流体力学、弹道控制与仿真.
猜你喜欢
流体机械(2022年8期)2022-10-13
大电机技术(2022年4期)2022-08-30
火箭推进(2022年2期)2022-05-14
上海交通大学学报(2021年8期)2021-09-02
数字海洋与水下攻防(2021年2期)2021-05-08
流体机械(2021年1期)2021-02-23
小学生优秀作文(低年级)(2019年6期)2019-07-01
舰船科学技术(2017年11期)2017-11-27
成长·读写月刊(2017年10期)2017-10-15
船海工程(2015年4期)2016-01-05
