PolyMAX模态参数识别算法的快速实现
2011-09-17 09:08孙鑫晖郝木明王淮维
振动与冲击 2011年10期
孙鑫晖, 郝木明, 王淮维
(中国石油大学(华东)化学工程学院,山东 东营 266555)
实验模态分析经历了几十年的发展历程,已经从单自由度发展为多自由度,由单输入单输出发展为多输入多输出,由局部估计发展为整体估计[1],并且新的识别方法不断出现。其中PloyMAX方法[2,3]是近几年发展起来的频域识别算法,该方法也称作多参考点最小二乘复频域算法(poly-reference least square complex frequencydomain)[4]。由于比较好的解决了频域算法中数值病态问题,该方法可以处理很宽的频率范围和很高的模态阶次。并且能够产生非常清晰的稳定图,适用于大阻尼与高噪声数据,目前已经成为一种工业标准。
本文通过分析该算法实现过程中的矩阵结构,给出了缩减正则方程的近似计算方法,从而避免了矩阵求逆以及乘法运算,使得计算量大为降低,提高了模态参数识别速度。
1 PolyMAX算法描述
1.1 频响函数的右矩阵分式模型
对于一个具有No个输出,Ni个输入的多输入多数出系统(MIMO),系统的频响函数 H(ω)∈CNo×Ni可以通过右矩阵分式模型进行描述:

其中矩阵多项式 B(ω)∈CNo×Ni、A(ω)∈CNi×Ni定义为:

其中 Ωj(ω)=exp(-iωTs·j)为基函数(Ts为采样周期),n为模型阶次,Aj、Bj(j=0…n)矩阵多项式系数。
1.2 正则方程的缩减
通过对式(1)右乘A(ω)进行线性化处理,然后利用最小二乘法求解系数矩阵。但是直接求解存在以下缺点是:
(1)当频响函数规模较大、模型阶次较高时导致正则方程的维数太高,直接求解难以实现。
(2)分母系数矩阵Aj不能独立于分子系数矩阵Bj求解,而模态参数的求解只需要分母系数矩阵Aj。
文献[4] 给出了一种通过缩减正则方程求解分母系数矩阵的方法,该方法能够大幅减小正则方程的维数且无需求解分子系数矩阵Bj。这里给出缩减正则方程的表达式,具体推导参见文献[4] 。

式(4)中Xo、Yo的表达式如下:
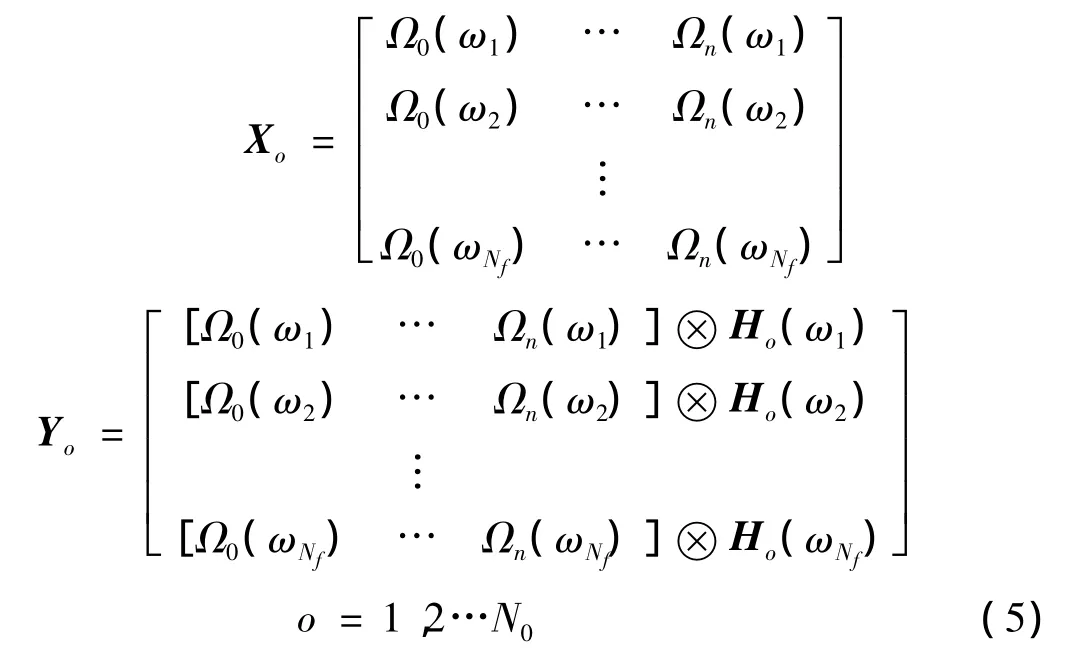
其中⊗为 kronecker积,Nf为识别频段内包含的谱线数。
1.3 通过系数矩阵得到模态参数
当系数矩阵Aj确定之后,模态参数可以通过式(6)中友矩阵进行特征值分解得到:
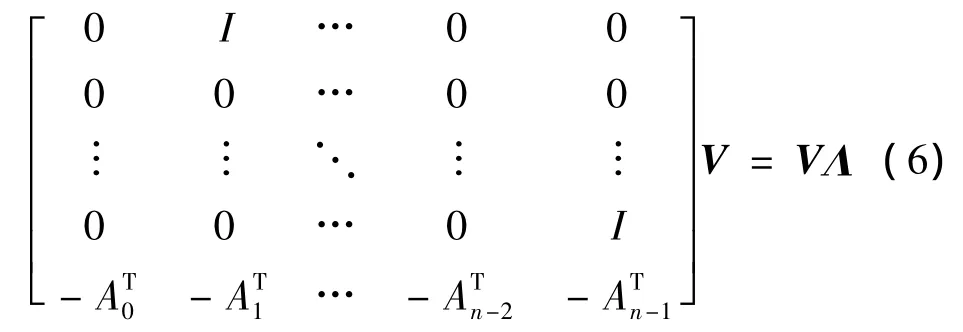
其中极点e-λiTs位于Λ的对角线上,频率与阻尼可以通过式(7)求得,模态参数与向量位于V最后Ni行对应的列向量。

2 PolyMAX算法的快速实现
PolyMAX算法的识别可以按照以下步骤进行:
① 确定出最高计算阶次nmax、最低计算阶次nmin。
② 通过式(4)得到阶次n对应的Ro、So、To。
③ 计算缩减的正则方程M,然后通过最小二乘求解系数矩阵Aj。根据式(6)、式(7)得到模态参数。
④ 改变系统阶次建立稳定图。
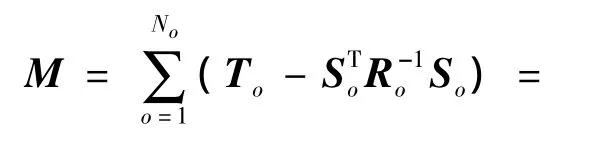
在计算 Ro、So、To的过程中,当 Xo、Yo维数很高时,一般不直接通过式(4)中矩阵乘法计算,而是采用FFT 运算代替矩阵乘法[4,5]。当 Ro、So、To计算完成之后,计算量主要集中在正则方程中矩阵M上,因为在建立稳定图的过程中,每一个阶次的改变,都需要重新计算矩阵M,通过式(3)可以看出,这需要大量的矩阵求逆以及矩阵乘法运算。对于复杂结构,输出数目N0很多、计算阶次n很高,在这种情况下计算量尤其突出。
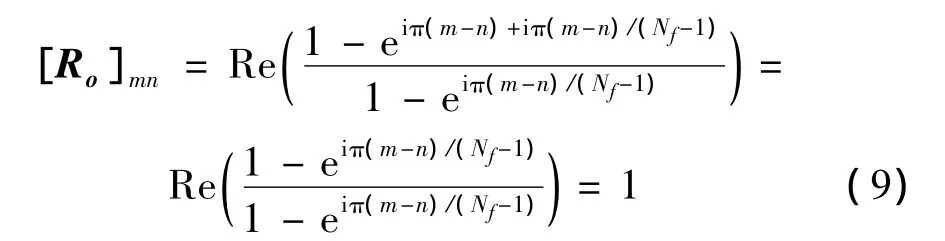
本文通过分析正则方程中矩阵R0的结构,给出其逆矩阵的近似计算方法。从而避免了矩阵的求逆以及乘法运算。通过将基函数表达式 Ω.j(ωk)=exp·(-iωkTs·j)=exp(-i(k-1)/(Nf-1)·j)带入到X0,然后由式(4)得到Ro的表达式如下:

由式(8)可以得出:当 m=n时,[Ro]mn=Nf
当m-n为偶数时:
当m-n为奇数时:
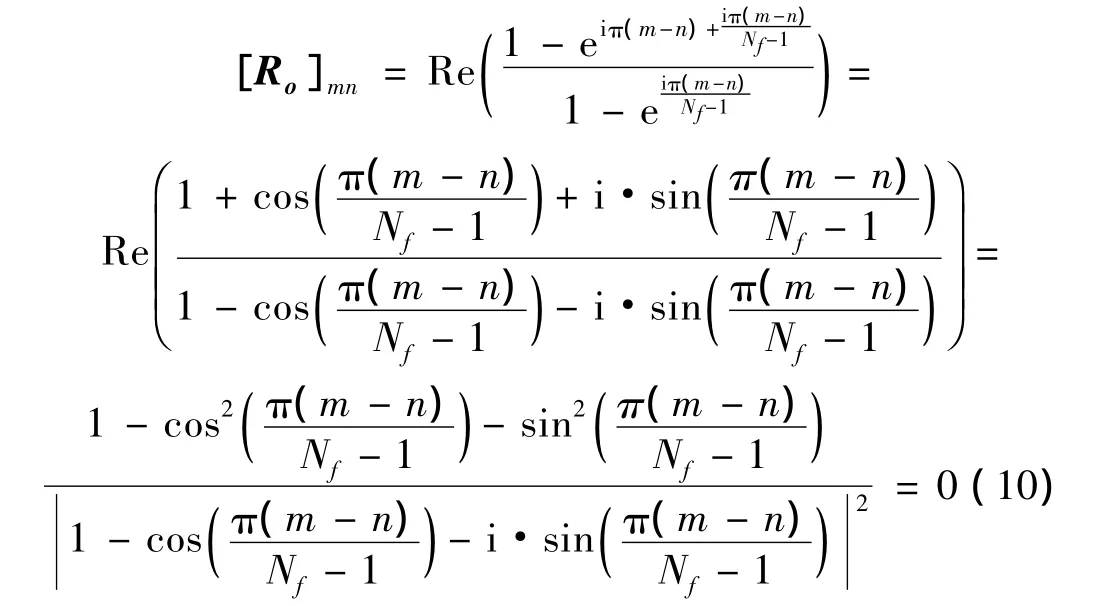
因此Ro具有如下形式:
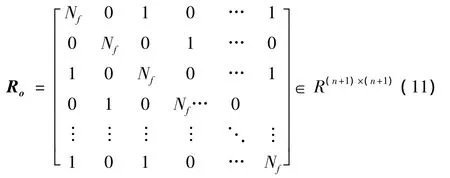
由于PolyMax为宽频带模态参数识别算法,识别范围内的谱线数Nf≫1,因此:

其中In+1为n+1维的单位矩阵。则M可以写成:

3 仿真算例
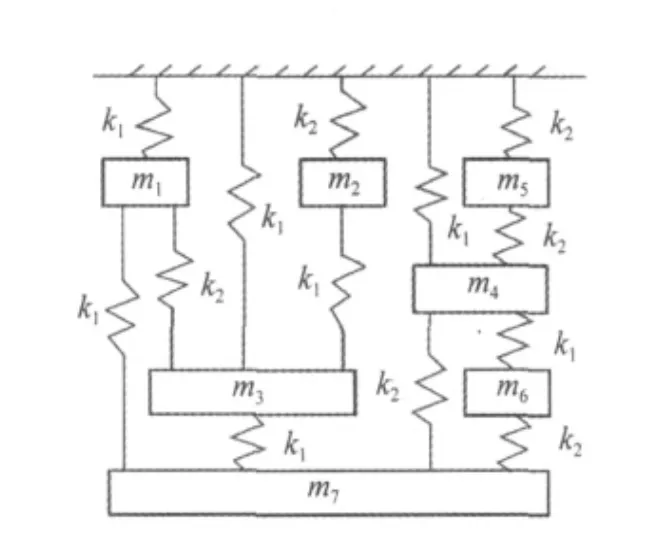
图1 七自由度系统Fig.1 Seven DOF system
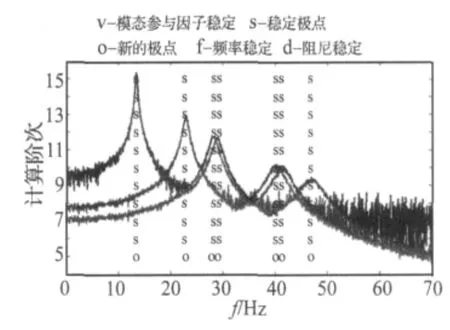
图2 稳定图Fig.2 Stabilization diagram
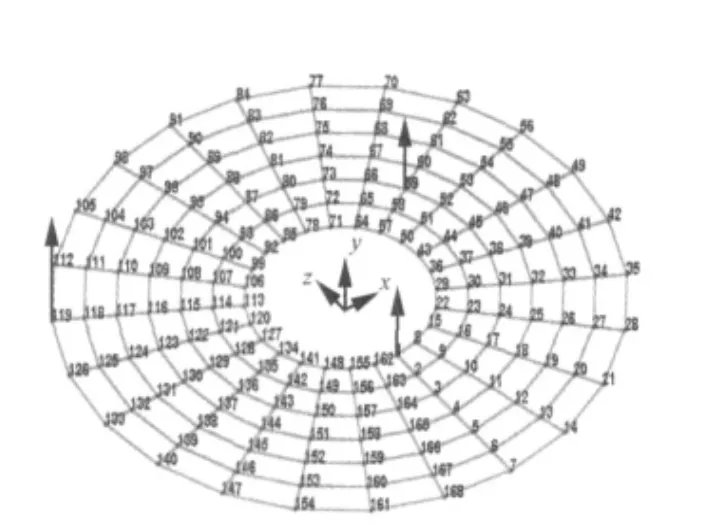
图3 涡轮盘测点布置(箭头为参考点)Fig.3 Measurement setup of gas turbine disk
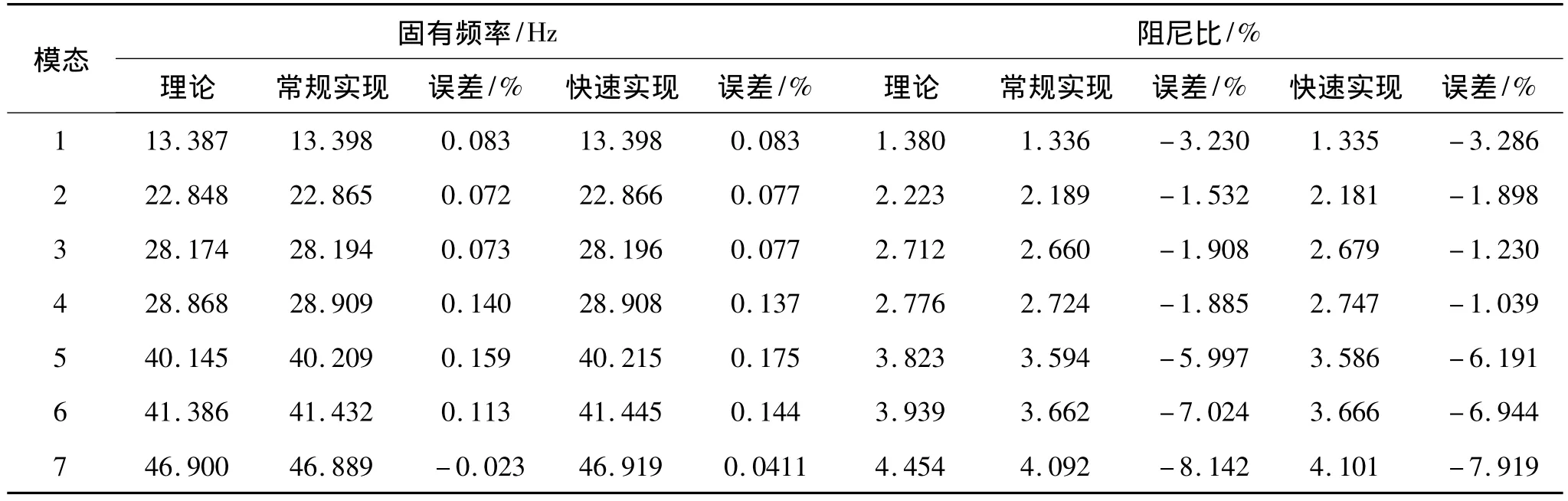
表1 常规实现与快速实现的识别结果比较Tab.1 Identification results between normal and fast implementation
4 实测算例
实测算例来自于某航空发动机涡轮盘模态实验,目的是验证当数据规模比较大时,快速实现方法所能带来的效率提高。实验通过锤击法进行测试,测点布置如图3所示。其中FRF中包含168个输出,3个输入。分析频率范围0-8 000 Hz,谱线数Nf=1 600。在分析范围内大约有50多个结构模态,根据式(14)中模型阶次n与结构模态数目Nm之间的关系,可以得出所需的模型阶次n大约为100阶。

图4为在不同阶次下的计算时间,每一次计算中阶次范围都为20(运行环境为Pentium M 、主频1.6 GHz、1 G内存、Matlab6.5编程)。从图中可以看出在计算阶次不高的情况下,二者的计算时间相差不大。随着计算阶次的提高,快速实现方法所用时间明显少于常规实现方法,并且阶次越高,差距越明显。这说明快速实现方法适合于复杂结构的大规模运算。图5为在最高计算阶次100下得到的稳定图。在此情况下,常规实现所用时间为123.6 s,而快速实现方法所用时间为42.7s。图6为识别的部分振型(前9阶)。
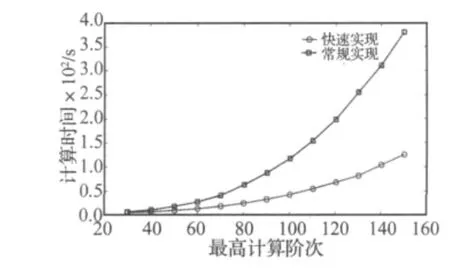
图4 计算时间的比较Fig.4 Comparison of computation time
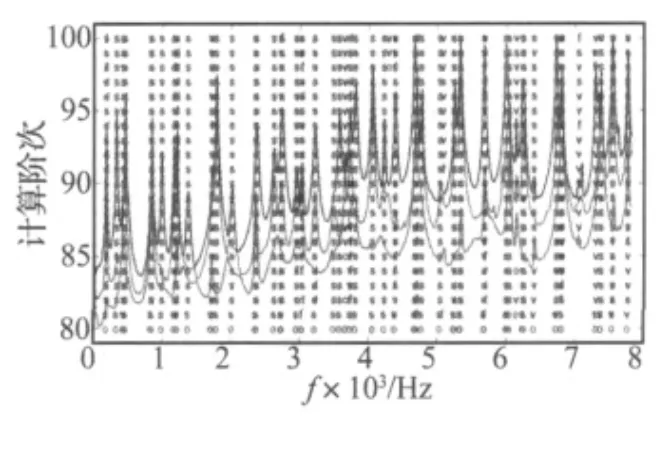
图5 稳定图Fig.5 Stabilization diagram
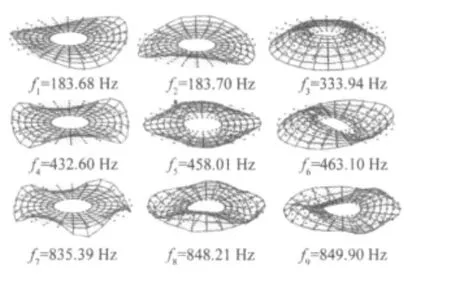
图6 识别的振型Fig.6 Identified modeshapes
5 结论
本文给出了PolyMAX算法的一种快速实现方法,该方法通过避免缩减正则方程中的求逆运算与矩阵乘法,减少了运算量。实测算例表明:在数据量比较大的情况下,与常规实现相比较,采用快速实现后参数识别时间显著减少,证明了该方法的可行性。并且输出数目越多、系统阶次越高的情况效果越明显,因此该方法适合于复杂结构的模态参数识别。
[1] 傅志方,华宏星.模态分析理论与应用[M] .上海:上海交通大学出版社,2000.
[2] Peeters B,Van Der Auweraer H,Guillaume P,et al.The PolyMAX frequency-domain method:a new standard for modal parameter estimation [J] .Shock and Vibration,2004,11:395-409.
[3] Peeters B,Guillaume P.Automotive and aerospace applictions of the LMS PolyMAX modal parameter estimation method[C] //Proc of the 22th International Modal Analysis Conference,Dearborn,USA,January,2004.
[4] Guillaume P,Verboven P,Vanlanduit S,et al.A polyreference implementation of the least-squares complex frequency domain estimator[C] // Proc of the 21th International Modal Analysis Conference.Kissimmee,USA,February,2003.
[5] Schoukens J,Rolain Y,Gustafsson F,et al.Fast calculation of least-squares for system identification[C] //Proc on the 37th IEEE Conference on Decision & Control,Florida,USA,December,1998,3408 -3410.
[6] Li Z F,Hua H X,Song H W,et al.Extracting modal parameters from structures undergoing ambient excitation excitation[J] .Journal of Shanghai Jiaotong University,2001,2:117-122.
[7] Shih C Y,Tsuei Y G,Allemang R J.Complex mode indication function and its applications to spatial domain parameter estimation[J] .Mechanical System and Signal Processing,1988,2(4):367 -377.
猜你喜欢
小学生学习指导(低年级)(2022年10期)2022-11-05
数学小灵通(1-2年级)(2021年10期)2021-11-05
语数外学习·初中版(2020年11期)2020-09-10
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
汽车实用技术(2019年24期)2019-12-27
小学生学习指导(低年级)(2019年9期)2019-09-25
组合机床与自动化加工技术(2019年7期)2019-08-06
中国机械工程(2019年12期)2019-07-11
东坡赤壁诗词(2019年3期)2019-07-05
价值工程(2017年28期)2018-01-23