
玉米收获机板式割台参数分析
2011-09-11 04:30:12郭春芳郭金跃赵秀全
山西农业大学学报(自然科学版) 2011年4期
郭春芳,郭金跃,赵秀全
(1.山西省太谷县农机局,山西 太谷030800;2.山西省太谷县经贸局,山西 太谷030800)
玉米在农牧业发展及农业产业转化中用途最为广泛,玉米种植面积在农作物种植中位居之首,当前玉米已成为发展高效农业的主导产品。而玉米收获作业的工作量在整个农业生产中占居了很大比重,因此加速实现玉米收获机械化是推进农业机械化、推进新农村建设、推进小康社会建设的一项十分重要的工作。但是从我国近年来推出的众多机型的玉米收获机推广应用的实际效果来看有关性能指标还很不理想,断茎、夹带、损伤、堵塞比较严重。
割台是玉米收获机的核心部件[1],割台技术参数选择确定又是提高玉米收获机技术水平的关键之关键。目前为止,我国设计研发的玉米收获机相关参数的选择还仅仅是以田间试验结果为依据,因而造成机型的地区局限性和对象局限性。为了更好地促进玉米收获机的升级换代和普及应用,本文作者在参与多项产品的开发试验基础上加以整理提炼,本着理论与实践相结合的原则,试+图利用建立数学模型的手段求出玉米收获机板式割台拨禾线速度和拉茎线速度的最佳参数点,以供同仁参考应用。具体分析、计算如下。
1 板式割台的基本结构和工作原理
玉米收获机板式割台的基本结构如图1所示,由分动箱、拨禾链、摘穗板和摘穗辊组成。

图1 玉米收割机割台结构Fig.1 Corn harvester cutting platform structure
其基本工作原理是机器的动力通过分动箱分解成两个方向的传动,在作业平面上由一对对转的链轮驱动一对拨禾链完成拨送植株的任务,在机器行进的方向上由一对对转的动力输出轴驱动一对对转的拉茎辊完成向割台下方拉茎的任务[2]。
在拨禾链和拉茎辊中间的作业平面上,布置有一对对应的摘穗板,用来完成摘下玉米果穗的任务。
机器在向前行进的过程中,分禾角自然插入玉米植株之间,将植株分拨到分禾角的两侧,并随着分禾角的前进玉米植株分别靠在分禾角两侧向后滑移,随及进入导禾区,进入导禾区的植株在拨禾链拨齿的拨动作用下,玉米植株被强制拨入一对摘穗板之间。
在摘穗区内工作机构由三个工作层面联动完成三个作业动作。一方面拨禾链拨齿继续向后拨送玉米植株,与此同时导入锥将植株引入一对拉茎辊之间,植株在一对拉茎辊的作用下强制向下拉动植株,在向下拉动的同时玉米果穗被一对摘穗板挡住,玉米果穗与茎杆之间产生了分离应力,果穗从茎杆上摘下,并被向后运动的拨齿带入搅龙输送器,摘穗后的植株被拉茎辊拉回地面,这一过程为板式摘穗割台的摘穗过程。如图2、图3。
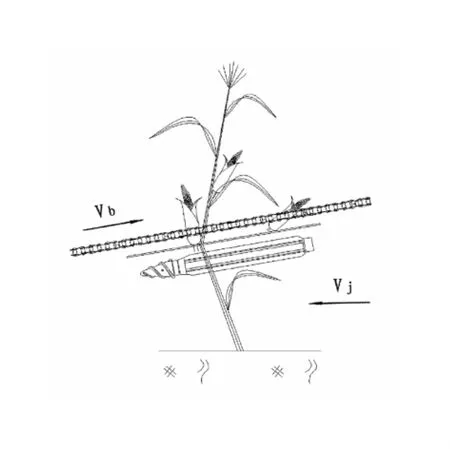
图2 摘穗机构工作原理图Fig.2 Harvesting body works
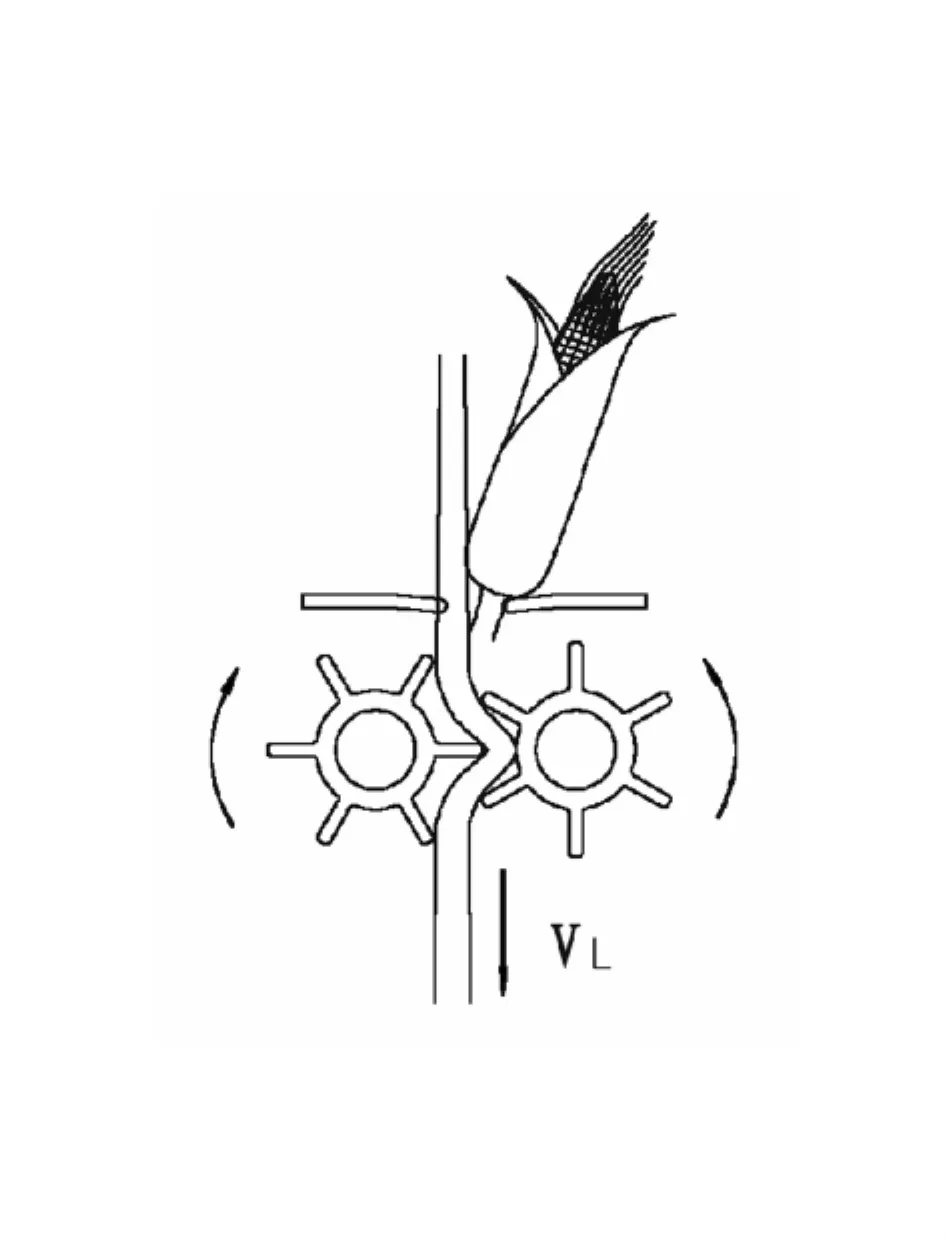
图3 拉茎摘穗原理Fig.3 Harvesting stem pull princture
2 板式割台的基本参数分析
2.1 拨禾链线速度的理论分析
当收获机以Vj速度向前行驶时,玉米植株相对于机器向相反方向以Vb速度移动,此时植株是稳定的没有倾倒的作用力,也就是说拨禾齿在平行于机器行进方向的线速度等于机器行进速度时能够最好地保持作物的稳定性。
对此要保持作业时植株受到的冲击力最小,就必需达到拨禾链在平行于机器行进方向的速度等于机器的行进速度[3]。由此得出拨禾链的最佳线速度
(α为机器行进方向与导入部分拨禾链运动方向的夹角)。该夹角一般为20°~25°。也就是说如果机器在Vj速度下作业,那么拨禾链的线速度应为;

一般情况下玉米收获时的常用作业速度为快二档中油门,这时的作业行走速度在6.7km·h-1左右,我们这时选择了1.1km·h-1,最终得出拨禾链的拨禾线速度为;

式中:Vb——拨禾链的最佳线速度
Vj——收获机速度
2.2 拉茎辊线速度的理论分析
根据板式割台[4,5]的工作原理玉米植株在拨禾链的拨送下沿摘穗板的间隙向相反于机器行进方向滑移,那么拉茎线速度与拉茎辊有效长度、拨禾链速度以及玉米植株通过拉茎辊的长度有关,它们之间的关系为:

式中:HVb-玉米植株通过拉茎辊的长度(通过抽样测定一般玉米植株高度为2.0~2.5m、割台作业时的离地高度一般为0.3~0.5m)
L-拉茎辊有效长度(根据综合性能试验一般取650~800mm)。
3 板式割台田间试验曲线
3.1 拨禾线速度试验对比
试验条件:
Vl=6.3m·s-1
Vj=6.m·s-1
H=2.5m
割台作业高度=500mm
植株含水率=18%
试验结果分析:
如图4,拨禾线速度与两个指标有关,一个是玉米植株的倒伏率,一个是断茎率[4]。从图4中显示的结果可以看出当拨禾速度小于1.2m·s-1时植株的倒伏率几乎是100%,当拨禾速度大于2.8 m·s-1时断茎率又几乎是100%。因此得出当:Vl=6.3m·s-1、Vj=6.7km·h-1、H=2.5m、割台作业高度=500mm、植株含水率=18%时拨禾线速度取2.0~2.2m·s-1是最佳参数。这一结果与上面的理论推导结果2.05m·s-1是相一致的,因此我们得出板式割台第一个重要参数板式割台拨禾链作业线速度Vb=2.0~2.2m·s-1
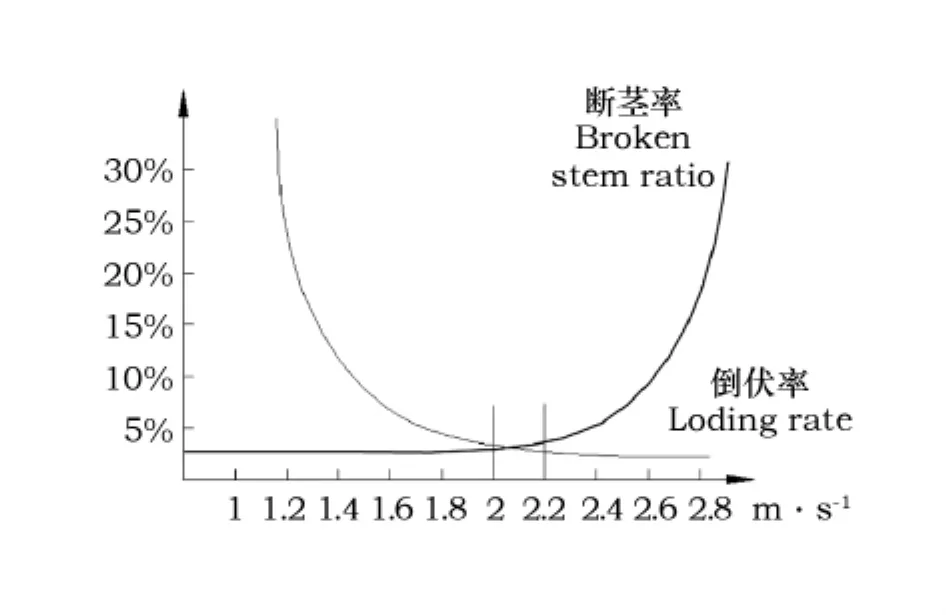
图4 拨禾线速度试验图Fig.4 drawing speed wo
3.2 拉茎线速度试验对比
试验条件:
Vb=2.05m·s-1
Vj=6.7km·h-1
H=2.5m
割台作业高度=500mm
植株含水率=18%
如图5,拉茎辊线速度与两个指标有关,一个是玉米果穗损伤率,一个是断茎率。从图5中显示的结果可以看出当拉茎速度小于3m·s-1时玉米植株断茎率几乎是100%,当拉茎速度大于10m·s-1时果穗损伤率又几乎是100%[6]。因此得出当Vb=2.05m·s-1、Vj=6.7km·h-1、H=2.5m、割台作业高度=500mm、植株含水率=18%时拉茎线速度取6~7m·s-1是最佳参数。这一结果与上面的理论推导结果6.3m·s-1是相一致的,因此我们得出板式割台第二个重要参数板式割台拉茎辊线速度Vl=6~7m·s-1
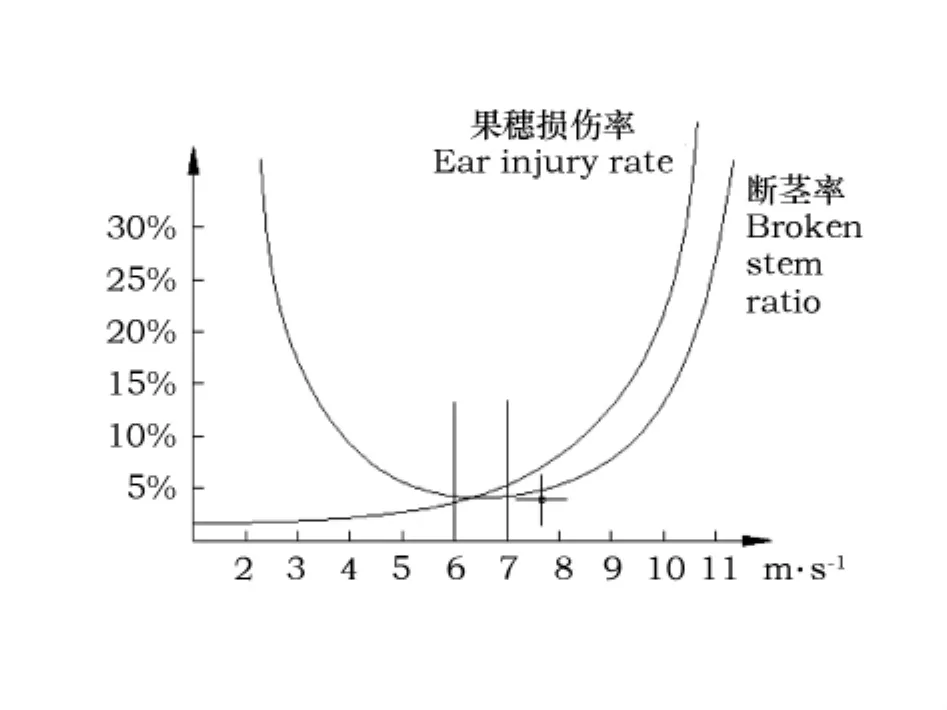
图5 拉茎辊线速度试验图Fig.5 Pull the stem roller speed test chart
4 板式割台主要参数分析结论与讨论
机器行进方向与导入部分拨禾链运动方向的夹角为20°~25°时,玉米收获作业行走速度在6.7 km·h-1左右,得出拨禾链线速度和拉茎辊线速度的理论值为:
拨禾链线速度:Vb=2.05m·s-1
拉茎辊线速度:Vl=6.3m·s-1
通过板式割台田间试验曲线,得出拨禾链线速度和拉茎辊线速度的实验数据范围为:
拨禾链线速度:Vb=2~2.2m·s-1
拉茎辊线速度:Vl=6~7m·s-1。
理论和实际相吻合[7]。
通过实验和理论分析表明,玉米联合收获机板式割台的拉茎辊线速度和拔禾链线速度在行走线速度,作物高度等一定的情况下,得出的最佳参数。
当然,在行走线速度,作物高度以及拉茎辊直径等参数不同的条件下,两次的参数必然会有所变化,但根据割台总结构的限制,拉茎辊直径[8]不可能过大或过小,过大会使割台尺寸及种植行距的适应性受到限制,作业行走速度和作物生长高度都存在一定的客观限制。目前,玉米植株的高度不可能超过2.8m,而收获机的行进速度也不可能超过10 km·h-1。因此,本研究结构在当前农业种植特征和农业机构作业安全稳定性方面得出的结论还是具有较高的权威性和实用性[9]。当然,随着科学技术事业的进一步发展,玉米品种的变化,以及农业机构整体水平的提高,玉米收获机割台的结构原理和技术参数也一定会有突破性的变化。
[1]李旭 ,李湘彬.玉米联合收获机摘穗装置比较分析研究[J].农机化研究,2010(9):9-10.
[2]董月亮.油菜联合收获机割台拔禾装置的运动仿真及试验研究[D].江苏大学硕士论文,2008:6.
[3]贺俊林.“飞象”牌4YZB-2700自走式玉米联合收获机技术报告.2010,12.
[4]钱录庆.“牧神”牌 YZ-2600自走式穗茎兼收玉米收获机[J].河北农机,2007(6):26.
[5]张喜瑞,董佑福.玉米收获机输送链装置研究[J].农业装备与车量工程,2007(10):10.
[6]邱贵春,卢景忠,薛飞.4YZW-2型玉米收获机的研究试验[J].玉米科学,2008(6):152-153.
[7]谢琼.我国玉米收获机械化技术研究[J].农业科技与装备,2010(6):84-85.
[8]刘声春,张道林,张继磊,等.我国玉米收获机研制现状及发展展望[J].农机化研究,2009(11):241-242.
[9]王优,张强,于路路.玉米摘穗装置的应用现状与展望[J].农机化研究,2011(1):228-229.
猜你喜欢
装备制造技术(2021年5期)2021-08-14 01:44:22
装备制造技术(2020年12期)2020-05-22 09:25:06
石油化工建设(2018年4期)2018-11-30 02:04:02
江西建材(2018年4期)2018-04-10 12:36:48
山东工业技术(2018年5期)2018-03-10 08:28:23
科技创新与应用(2016年34期)2016-12-23 15:59:26
新农业(2016年13期)2016-08-16 12:12:42
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:52
新高考·高一物理(2016年3期)2016-05-18 02:59:14
设备管理与维修(2016年6期)2016-04-09 14:49:47
