
机载双站SAR的通用模型及其结构分析
2011-09-03 06:24:32武拥军张建华
合肥工业大学学报(自然科学版) 2011年12期
武拥军, 张建华, 宋 铮
(电子工程学院 信息系,安徽 合肥 230037)
双-多站合成孔径雷达(Bi-and Multistatic SAR)利用收、发雷达分置的特点,获得了许多应用上的优势,如雷达的隐蔽性和抗干扰性得到增强、可利用非后向散射获取更丰富的目标信息、使前视成像成为可能、扩展了成像雷达的功能、调整系统信噪比和干涉处理更加容易等,在军事和民用领域都展现出广阔的应用前景,成为SAR技术研究的一个重要发展方向。
在各种双-多站SAR的系统构成中,机载双站SAR以其系统实现容易、成本较低、灵活多样的空间配置能够满足未来战争对雷达生存能力的需求等特点,成为双站SAR研究中优先发展的类型[1-2]。目前,机载双站SAR已经通过了飞行验证试验,理论研究成果正在逐步积累,但是还未形成理论框架,缺乏统一的空间模型及其描述方法。本文提出了一个通用的机载双站SAR空间模型,定义了描述该模型的2个结构参数,由此建立起了目标位置相对于收、发载机飞行轨迹的联系,将雷达回波统一表示为相对于接收机轨迹的形式。根据2个结构参数的取值及其变化特点,对机载双站SAR的空间构型进行了分类,讨论了各种构型下机载双站SAR的工作模式及其对收、发雷达天线波束控制的要求。最后,通过仿真研究了各种机载双站SAR构型情况下2个结构参数的变化特点,为成像理论与算法研究提供了理论基础。
1 机载双站SAR的通用模型
机载双站SAR的通用几何模型,如图1所示。
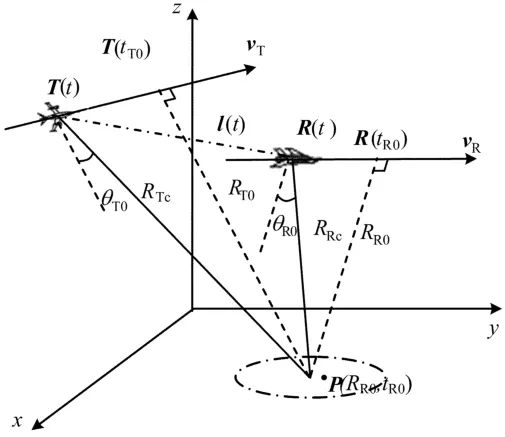
图1 机载双站SAR的通用几何模型
图1中,发射机和接收机分别以速度vT和vR向前做匀速直线飞行,并不断以斜视角θT0向观测区域辐射电磁脉冲信号,以斜视角θR0接收侧向散射回波。
设发射机在飞行过程中的位置为T(t),接收机位置为R(t),观测区域中任一点目标的位置为P(RR0,tR0),其中tR0为从接收机轨迹垂直观测该点目标的时刻,RR0为对应时刻的目标斜距RR0=|RR(tR0;RR0,tR0)|,则接收机到该点目标的斜距为:

其中,t为合成孔径(方位)时间。
同样,设发射机垂直观测点目标P(RR0,tR0)的时刻为tT0,此时接收机到该点目标的斜距为RT0=|RT(tT0;RT0,tT0)|,则发射机到该点目标的斜距为:

发射机和接收机之间的基线用矢量l(t)表示,它与收、发载机位置之间的关系为:

为了描述机载双站SAR的结构,定义结构参数a1为发、收载机垂直飞过点目标P(RR0,tR0)的时间差,定义对应时刻的斜距之比为结构参数a2[3-4],即

假设机载双站SAR的辐射信号为:

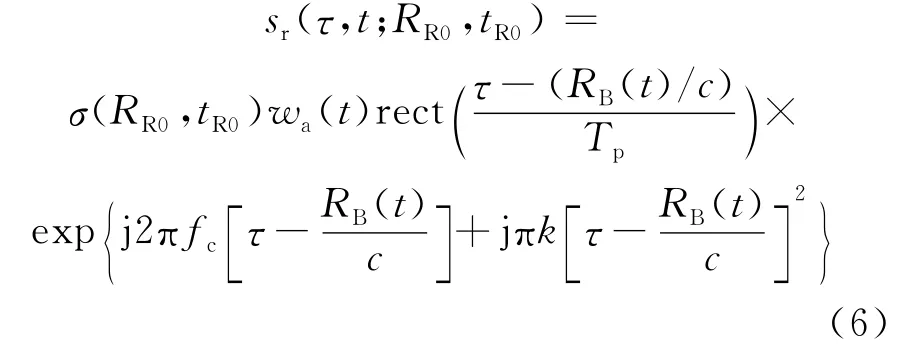
其中,τ为快时间;σ(RR0,tR0)为目标P(RR0,tR0)的散射系数;wa(·)为回波的方位向包络,由收、发天线的方位向方向函数共同确定;RB(t)为机载双站SAR的斜距历程,可以写成:
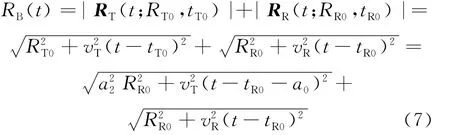
将(7)式代入(6)式,就是以接收机轨迹为参考的回波信号模型,它与双站结构参数a0和a2有关,其空变性将会影响目标回波的空变性,是双站SAR回波不同于单站SAR的一个显著特征。
2 空间构型及其工作模式
由图1可见,机载双站SAR可能具有多种空间构型和工作模式,每种构型中双站结构参数a0和a2都会有不同的取值及变化特点,据此可以对机载双站SAR的空间构型进行分类[6]。
(1)当a2=1,a0=0时,双站构型退化为常规单站构型。雷达回波信号只具有距离空变性,方位向是移不变的。
(2)当a2=1,a0≠0但为常数时,为串行双站构型Ⅰ。收、发载机以相同的速度沿同一轨迹飞行,因此又称为顺轨双站SAR构型,其基线l(t)保持不变,雷达回波信号具有距离空变性和方位移不变特性。
(3)当a2=1,a0≠0且随tR0变化时,为串行双站构型Ⅱ。收、发载机以不同的速度沿同一轨迹飞行,基线l(t)沿轨迹方向,长度随方位时间t变化,雷达回波信号具有距离空变性和方位移变特性。
(4)当a2≠1且随RR0变化,a0为常数时,为并行双站构型Ⅰ。收、发载机以相同的速度沿平行轨迹飞行,基线l(t)保持不变,雷达回波信号具有距离空变性和方位移不变特性。
(5)当a2≠1且随RR0变化,a0随tR0变化时,为并行双站构型Ⅱ。收、发载机以不同的速度沿着平行轨迹飞行,基线l(t)的长度和方向随方位时间t变化,雷达回波信号具有距离空变性和方位移变特性。
(6)当a2≠1,a0≠0且随RR0和tR0变化时,为一般双站构型。收、发载机以相同或不同的速度沿着非平行轨迹飞行,基线l(t)的长度和方向随方位时间t变化,雷达回波信号具有距离空变性和方位移变特性。
上述6种基本构型还可以根据观测场景相对于收、发载机位置的不同,以及收、发雷达工作模式的不同再做更细致的分类,如正侧视、前斜视、后斜视、前斜视-后斜视等成像方式,本文从略。
与单站SAR的工作模式类似,机载双站SAR也可以工作于条带模式和聚束模式。当工作于聚束模式时,要求收、发雷达能够自动调节其天线波束指向,实现对观测区域的空间同步,这可以借鉴单站聚束SAR的波束调整方法,利用脉冲追逐的方式来实现[7]。当工作于条带模式时,受空间构型的影响其对雷达天线波束的调整要求比较复杂。在串行双站构型Ⅰ和并行双站构型Ⅰ2种情况下,一旦实现空间同步,就无需调整收、发天线波束的指向,只需保持确定的空间构型即可;而在串行双站构型II和并行双站构型Ⅱ2种情况下,由于运动速度不同,需要对发射天线或接收天线的波束指向进行调整,才能保持空间同步。一般构型中,为了保持空间同步,需要采用复合成像模式,其中接收机以条带模式工作,发射机天线波束跟随接收机天线波束移动,对发射天线的波束控制提出了更高要求。
目前,在各种双站构型和工作模式中,串行双站构型Ⅰ和并行双站构型Ⅰ的条带模式和聚束模式得到了较多的研究,如文献[8-9],其他构型和模式的成像理论及其算法研究还处于探索阶段[10-13]。
3 双站结构参数的变化特点
由以上分析可知,双站结构参数a0和a2是描述各种双站构型的重要指标,它们的变化会对机载双站SAR的脉冲响应函数产生影响[3,6],下面对其变化特点进行分析。
在图1所示的双站几何结构中,假设观测场景是平行于接收机飞行轨迹的条带,其中任一点目标P(xP,yP,0)到收、发载机飞行轨迹的最近距离为RT0,P和 RR0,P,可以利用点到直线的距离公式来求解,代入(5)式即可得到
鉴于收、发载机均平飞,双站结构参数a0,P的计算可以在图2所示的地面投影图中来进行。对于tR0,P,有

其中,yP为观测场景中点目标P(xP,yP,0)的方位向坐标;RRc为接收机天线波束中心扫过观测场景中心时的斜距。
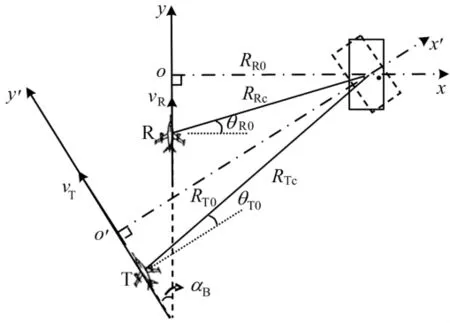
图2 机载双站SAR空间结构的投影
计算tT0,P时,需先将观测场景变化到以发射机轨迹为参照的坐标系下,使其平行于发射机轨迹,该坐标变换公式为:
其中,(xT0,yT0)为观测场景中心点到发射机飞行轨迹的垂足坐标;αB为收、发载机飞行轨迹之间的夹角。然后利用(10)式计算tT0,P:

其中,RTc为发射机天线波束扫过观测场景中心时的斜距。
再将tR0,P和tT0,P代入(4)式,可求得a0,P。
假设发、收载机在t=0时刻的位置分别为(0km,-10km,5km)和(0km,0km,5km),飞行轨迹间的夹角αB=0,vT=vR=100m/s,构成了串行双站构型Ⅰ,观测区域的距离向为17.5~22.5km,方位向为-3~3km,可得a2=1,a0=100s。若使vT=120m/s,vR=100m/s,构成了串行双站构型Ⅱ,可得a2=1,a0的变化曲面如图3所示。
图3 串行双站构型Ⅱ中a0的变化
由图3可以看出,沿方位向a0成直线率减小,沿距离向该参数保持不变,这种特点是由收、发载机飞行速度不同引起的方位向空变性。
再假设发、收载机在t=0时刻的位置分别为(- 4.16km,- 7.07km,10.72km)和(0km,0km,5km),飞行轨迹间的夹角αB=0,vT=vR=100m/s,构成了并行双站构型Ⅰ,观测区域的距离向仍为 17.5~22.5km,方位向为-3~3km,可得a0=70.71s,a2的变化如图4所示。
图4 并行双站构型Ⅰ中a2的变化
由图4可以看出,沿方位向a2保持不变,而沿距离向a2是减小的,这是由收、发载机飞行轨迹分离引起的。若保持其他参数不变,而使vT=120m/s,vR=100m/s,构成了并行双站构型Ⅱ,可得a0和a2的变化曲面如图5所示。
由图5可以看出,平行的收、发载机飞行轨迹使得a2具有与并行双站构型Ⅰ相同的变化特点,而vT>vR的特点使a0沿方位向线性减小,沿距离向保持不变。

图5 并行双站构型Ⅱ中a0和a2的变化
对于一般构型机载双站SAR,仍然假设发、收载机在t=0时刻的位置分别为(-4.16km,-7.07km,10.72km)和(0km,0km,5km),但飞行轨迹间的夹角αB=18°,vT=120m/s,vR=100m/s,观测条带与接收机飞行轨迹平行,沿距离向为17.5~22.5km,方位向为-3~3km,可得a0和a2的变化如图6所示。
图6 一般构型中a0和a2的变化
由图6可以看出:vT>vR的特点使得a0沿方位向减小,而且非平行的收、发载机飞行轨迹也使得a0沿距离向减小;沿方位向a2逐渐增大,这是收、发载机飞行轨迹不平行,使得同一距离门内的目标到发射机飞行轨迹的最近距离增大引起的;沿距离向a2逐渐减小,体现了目标远离收、发载机时同一目标到收、发载机飞行轨迹的最近距离差减小的变化趋势。
综合以上分析可知,双站结构参数a0和a2可以对机载双站SAR的空间几何结构进行全面的描述。当a0为常数时,表明收、发载机的飞行轨迹平行、飞行速度相等,尽管a2可能具有距离向空变性,雷达回波仍然是方位向移不变的(串行Ⅰ和并行Ⅰ)。如果a0沿方位向成线性变化,但沿距离向保持不变,则表明收、发载机的飞行轨迹平行,但飞行速度不等,无论a2是否具有距离向空变性,雷达回波信号都是方位向移变的(串行Ⅱ和并行Ⅱ)。若a0沿方位向和距离向都发生变化,则表明收、发载机的飞行轨迹不平行,此时a2既随距离变化,也随方位变化,雷达回波是二维空变的。
4 结束语
机载双站SAR是双-多站合成孔径雷达中获得优先发展的类型,本文给出了其通用几何模型,并通过引入的2个双站结构参数,给出了雷达回波基于接收机轨迹的信号模型。双站结构参数能够全面描述机载双站SAR的构型特征,据此对常用的机载双站SAR构型做了分类,讨论了在各种构型情况下的工作模式及其对收、发天线的控制要求。除了目前研究较多的方位向移不变双站构型外,在其他构型中2个双站结构参数都表现出比较复杂的变化特性,会随着方位向或距离向,或同时随着距离向和方位向发生变化,使得雷达回波在原有距离向空变性的基础上增加了方位向空变性,成为双站SAR不同于传统单站SAR的重要特征[14]。
利用2个双站结构参数,将雷达回波统一表示成以接收机轨迹为参考坐标的形式,为成像算法的研究奠定了基础,但是还需要考虑在各种双站构型中2个结构参数空变对雷达回波影响的程度,这将是进一步研究的内容。
[1]Walterscheid I,Brenner A R,Ender J H G.Geometry and system aspects for a bistatic airborne SAR experiments[C]//Proc EUSAR,2004,Ulm,Germany,2004:567-570.
[2]Wendler M,Krieger G,Rodriguez M,et al.Analysis of bistatic airborne SAR data[C]//Proc EUSAR,2004,Ulm,Germany,2004:571-572.
[3]Loffeld O,Nies H,Petersburg V,et al.Models and useful relations for bistatic SAR processing[J].IEEE Transactions on GRS,2004,42(10):2034-2038.
[4]Ender J H G.Signal theoretical aspects of bistatic SAR [C]//Proc IGARSS,2003,Toulouse,France,2003:1438-1441.
[5]Ben Kassem M J,Saillard J,Khenchaf A.BISAR mapping I:theory and modelling [J].Progress in Electromagnetics Research,2006,61:39-65.
[6]武拥军.机载双-多站合成孔径雷达成像理论与算法研究[D].合肥:安徽大学,2009.
[7]Willis N J.Bistatic radar[M].2nd ed.Silver Spring,MD:Technology Service Corporation,1995:125-130.
[8]Ender J H G,Walterscheid I,Brenner A R.Bistatic SAR translational invariant processing and experimental results[J].IEE Proc Radar Sonar Navig,2006,153(3):177-183.
[9]Walterscheid I,Ender J H G,Brenner A R,et al.Bistatic SAR processing and experiments[J].IEEE Transactions on GRS,2006,44(10):2701-2716.
[10]Yang Yonghong,Pi Yiming.Azimuth space-variant properties of BiSAR with nonequal velocities[J].Journal of Systems Engineering and Electronics, 2008, 19(5):919-922.
[11]Natroshvili K,Loffeld O,Maya A,et al.Focusing of general bistatic SAR configuration data with 2-D inverse scaled FFT[J].IEEE Transactions on GRS,2006,44(10):2718-2727
[12]Wong F H,Cumming I G,Neo Y L.Focusing bistatic SAR data using the nonlinear chirp scaling algorithm[J].IEEE Transactions on GRS,2008,46(9):2493-2505.
[13]Zhang L,Jing W,Xing M D,et al.Unparallel trajectory bistatic spotlight SAR imaging[J].Sci China Ser F:Inf Sci,2009,52(1):91-99.
[14]武拥军,吴先良.用于VHF/UHF波段SAR成像的改进型NLCS算法[J].合肥工业大学学报:自然科学版,2009,32(3):417-420.
猜你喜欢
中国造纸(2022年9期)2022-11-25 02:24:54
幼儿园(2021年12期)2021-11-06 05:10:20
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
环球时报(2019-04-03)2019-04-03 04:15:14
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23
幸福·健康版(2016年10期)2016-11-17 11:21:46
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
西藏科技(2015年10期)2015-09-26 12:10:16
